PIXHAWK 2.4.8调试工具使用秘籍:故障排查与性能监控双管齐下
发布时间: 2024-11-29 05:55:18 阅读量: 42 订阅数: 26 

Pixhawk2.4.8飞控APM固件Missionplanner软件,飞机基础调试详细教程

参考资源链接:[PIXHAWK 2.4.8飞控板原理图详解](https://wenku.csdn.net/doc/y22vy5gg7w?spm=1055.2635.3001.10343)
# 1. PIXHAWK 2.4.8概述与安装
## 1.1 PIXHAWK 2.4.8概述
PIXHAWK 2.4.8是一款先进的开源固件,广泛应用于无人机(UAV)的自动驾驶仪系统中。以其优异的性能和稳定的运行,成为了众多开发人员和爱好者的首选。该版本在之前的版本基础上进行了大量的改进和升级,尤其是在硬件兼容性、飞行性能和用户界面等方面进行了深度优化。
## 1.2 PIXHAWK 2.4.8安装步骤
PIXHAWK 2.4.8的安装过程相对简单,首先,需要从官方网站下载最新的固件版本。然后,将固件写入支持的飞控板,如PX4或Ardupilot。最后,进行必要的配置和校准,便可以开始使用了。具体的安装步骤如下:
1. 下载PIXHAWK 2.4.8固件。
2. 使用QGroundControl等地面控制软件,将固件上传到飞控板。
3. 配置飞控参数,包括遥控器、GPS、传感器等。
4. 进行飞行动态和静态校准。
安装PIXHAWK 2.4.8的过程需要一些基本的飞控知识,但通过详细的教程和文档,大多数用户都可以顺利完成安装。接下来,我们就可以进入PIXHAWK的调试基础学习,深入探索其内部的丰富功能。
# 2. PIXHAWK调试基础
### 2.1 PIXHAWK的系统架构与组件
#### 2.1.1 PIXHAWK的主要硬件组件
PIXHAWK是开源无人机控制系统的行业标准之一,广泛应用于自动控制飞行器。要深入了解PIXHAWK,我们先从其主要硬件组件开始。PIXHAWK由多个关键硬件构成,包括中央处理单元(CPU)、传感器模块、通信接口等。
- **中央处理单元(CPU)**:核心处理模块,负责运行飞行控制软件,执行飞行任务,处理传感器数据等。通常采用高性能的微控制器单元(MCU),例如STM32系列或PX4FMU等。
- **传感器模块**:包括但不限于加速度计、陀螺仪、磁力计、气压计和GPS模块。这些传感器为PIXHAWK提供飞行状态信息,如加速度、角速度、磁场强度、气压和地理位置。
- **通信接口**:主要包括无线电通信模块和串行接口。无线电通信模块使得PIXHAWK能够与其他飞行器或地面站进行无线通信,而串行接口则用于连接外部设备,例如摄像头或自定义的传感器。
这些硬件组件协同工作,确保飞行器能够在各种复杂的环境下进行稳定飞行。
#### 2.1.2 PIXHAWK的软件架构解析
PIXHAWK的软件架构是多层次、模块化的,它允许多个任务并发运行,同时保持系统的稳定性和实时性。软件架构由以下几个层次组成:
- **固件层**:PIXHAWK使用PX4或Ardupilot固件,它们都基于RTOS(实时操作系统)构建,为飞行控制提供核心功能。
- **中间件层**:包括各种驱动程序和接口,它们为应用程序层提供服务,例如传感器驱动、GPS驱动、以及飞行控制算法库等。
- **应用层**:用户可以通过这一层编写特定的应用程序,执行如自动飞行任务、路径规划等高级功能。
软件架构中的每个层次都有严格的模块划分,确保了系统的高效运行以及易于维护和扩展。
### 2.2 PIXHAWK调试接口与工具概览
#### 2.2.1 标准调试接口与协议
调试 PIXHAWK 时,我们可以使用多种标准调试接口和协议,主要包括:
- **MAVLink协议**:MAVLink是一个轻量级的消息协议,广泛用于飞行器和地面站之间的通信。使用MAVLink协议,开发者可以发送和接收飞行控制信息、获取飞行状态、进行遥控等操作。
- **JTAG/SWD接口**:在硬件调试层面,使用JTAG(Joint Test Action Group)或SWD(Serial Wire Debug)接口可以进行低级调试。这些接口允许我们检查和修改CPU的寄存器内容,甚至在程序中设置断点进行单步执行。
- **串口调试**:PIXHAWK通过串口与许多外设进行通信。调试时,我们可以利用串口监控飞行器的启动过程、输出调试信息或进行实时参数调整。
这些接口和协议为开发者提供了全面的调试手段,覆盖从硬件到软件的各个层面。
#### 2.2.2 常用调试工具的安装与配置
为了有效使用上述调试接口和协议,我们需要掌握一些常用的调试工具:
- **QGroundControl**:这是一个功能全面的地面站软件,支持飞行器任务规划、实时飞行数据监控、飞行日志分析等。安装和配置QGroundControl相对简单,只需从官方网站下载相应版本并安装即可。
- **JTAG/SWD调试器**:例如Segger J-Link或ST-Link等,这些调试器可以连接到PIXHAWK的JTAG/SWD接口进行硬件级别的调试。安装对应的驱动程序并配置调试器软件是使用这些工具的前提条件。
- **串口调试工具**:常见的串口调试工具有PuTTY、Tera Term等,这些工具能够实现串口通信、实时日志记录等功能。安装这些工具后,用户需要配置串口号、波特率等参数,以匹配 PIXHAWK 的串口设置。
正确安装和配置这些工具,可以大大提高调试效率和问题解决的速度。
### 2.3 PIXHAWK故障排查基本流程
#### 2.3.1 日志分析与错误识别
在PIXHAWK的故障排查中,日志分析是关键一步。PIXHAWK通过MAVLink协议输出飞行日志,这些日志包含了丰富的飞行信息和可能的错误提示。
- **飞行日志获取**:使用QGroundControl或其他支持MAVLink的地面站软件,可以轻松地下载并分析PIXHAWK的飞行日志。
- **日志内容解读**:日志文件通常为CSV或TLOG格式,包含了飞行数据、事件信息、错误代码等。通过逐条检查这些信息,可以识别出系统运行中的异常。
识别错误后,下一步是通过日志内容定位问题源头,并进行相应的故障排查。
#### 2.3.2 实时调试与数据监控
在故障排查的后期阶段,实时调试和数据监控成为解决问题的重要手段。
- **串口实时监控**:通过串口调试工具,我们可以在飞行器运行过程中实时查看系统输出信息,包括状态更新、传感器数据和错误报告。
- **动态参数调整**:利用QGroundControl等软件工具可以动态地调整飞行器参数,如PID控制参数、飞行模式设置等。实时调整参数可以帮助我们观察系统响应,验证问题解决的效果。
通过实时调试与数据监控,我们能够更加直观地理解系统行为,并做出快速准确的故障诊断和处理。
```mermaid
graph TD
A[开始故障排查] --> B[获取飞行日志]
B --> C[分析日志内容]
C --> D[错误识别]
D --> E[实时调试]
E --> F[数据监控]
F --> G[问题定位]
G --> H[制定解决方案]
H --> I[验证修复效果]
I --> J[结束故障排查]
```
### 2.4 PIXHAWK故障排查的高级技巧
在本章节中,我们将介绍一些高级故障排查技巧,它们可以帮助开发者或维护者更深入地了解PIXHAWK系统,并快速定位问题。
#### 2.4.1 进阶系统诊断命令
PIXHAWK提供了一组系统诊断命令,可以帮助用户检查系统状态和配置,常用的命令有:
- `diag`:列出所有诊断命令。
- `perf`:性能分析工具,

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《PIXHAWK 2.4.8终极指南》是一部全面的专栏,深入解析了开源飞控PIXHAWK 2.4.8的方方面面。专栏涵盖了从原理图解读到系统架构、飞行算法、硬件接口、固件升级、调试工具、传感器校准、动力学建模、参数调整、任务规划、多旋翼控制、安全机制、无线电通信、地面站软件、编程接口、扩展模块、视觉定位、动力学模型优化、故障诊断和多机协同控制等一系列主题。通过深入浅出的讲解和丰富的图例,专栏旨在帮助读者全面了解PIXHAWK 2.4.8的原理、功能和使用技巧,从而提升飞控应用水平,实现更稳定、更安全的无人机飞行。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【CUDA性能革命】:如何通过替换Mamba selective-scan-cuda-linux-gnu.so提升性能?

# 摘要
本文针对CUDA性能现状面临的挑战进行了系统分析,并探讨了Mamba库与CUDA之间的关系,特别是Mamba库中的selective-scan-cuda-linux-gnu.so组件的作用与性能瓶颈。文章进一步提出了针对该组件的
LabVIEW高级秘籍:5种方法极大提升测量文件处理效率
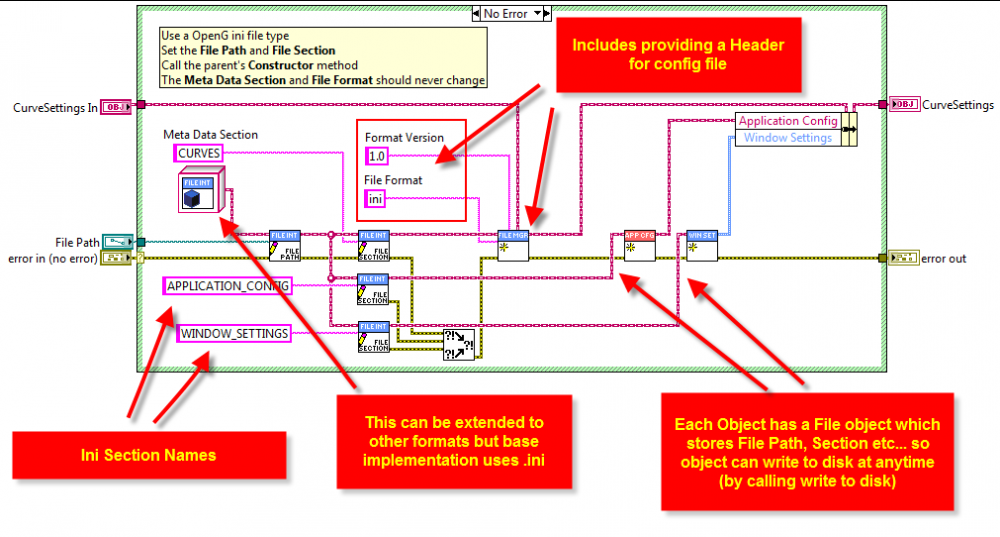
# 摘要
本文深入探讨了使用LabVIEW进行测量文件处理的多种方法和技巧。从基础的文件读写操作、数据缓存技术的应用,到高效的读写测量数据和数据组织与管理,本文涵盖了LabVIEW在处理测量文件中的基本和高级技术。本文还讨论了如何提高测量文件处理速度,包括利用并行处理、代码优化以及硬件加速和外部程序接口。最后,本文展示了LabVIEW在高级应用场景中的实际应用
【相机标定工具精选】:软硬件选择与比较,专家推荐指南

# 摘要
相机标定是计算机视觉领域中重要的前置步骤,它影响着图像测量、物体识别和三维重建的精度。本文旨在为读者提供一个全面的相机标定指南,内容涵盖了从基础
【移动应用分发机制全面探索】:一文搞懂不同平台的安装包分发策略

# 摘要
本文对移动应用分发机制进行了全面的探讨,涵盖了移动平台安装包的结构解析、应用分发渠道与策略、分发安全与性能优化以及未来技术趋势。通过对Android和iOS平台安装包(APK和IPA)的详细分析,揭示了不同平台安装包的组成与管理特点。此外,本文探讨了应用商店、P2P、云分发以及企业内部分发的渠道和策略,并重点分析了在这些渠道中确保安全性的机制。性能优化方面,文章提出了一系列优化策略,旨在提高用户体验和应用分发的效率。最后,本文展望了人工智能、分布式账本技术以及新兴网
Visual C++ 14.0安装全攻略:一步到位解决安装烦恼(必看!)
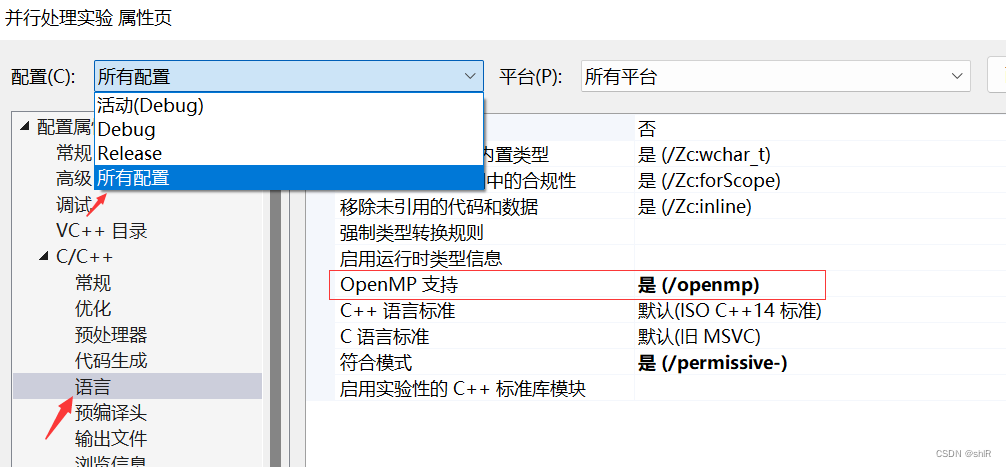
# 摘要
本文详细介绍了Visual C++ 14.0的安装过程,包括系统要求分析、下载安装步骤以及环境配置和调试。文章首先分析了Visual C++ 14.0的系统兼容性和必要的软件环境配置,强调了环境变量设置的重要性。接着,阐述了安装包的获取、安装向导的使用和安装过程的验证方法。文章还介绍了如何配置Visual C++ 14.0环境,应用调试工具,以及处理安装和运行时的常见问题。最后,提出了开发环境性能优化
KCU116原理图故障排查:掌握这些技能,提升电路可靠性
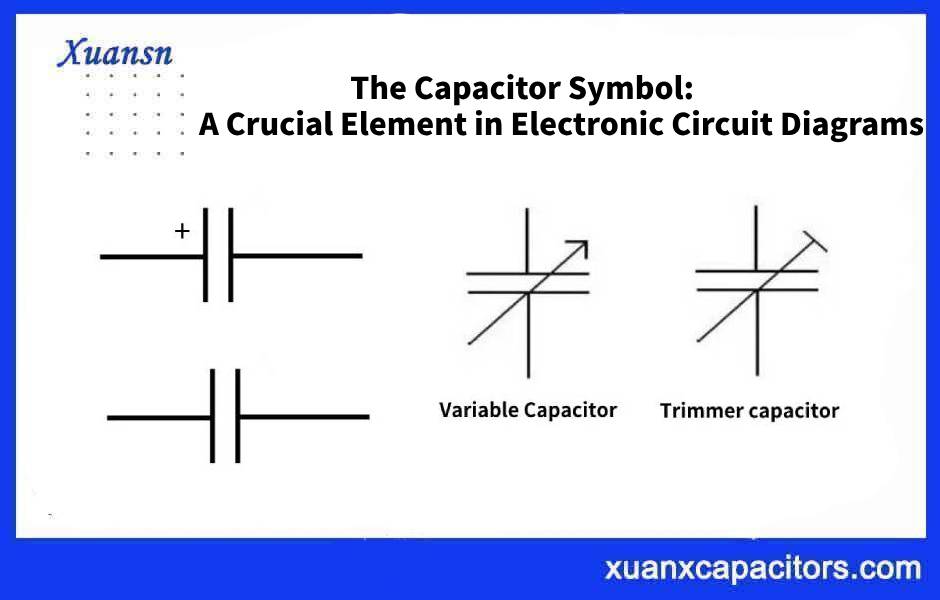
# 摘要
本文全面介绍了KCU116原理图故障排查的理论与实践方法。首先概述了故障排查的基本原理和电子元件基础知识,随后详细探讨了电路故障排查的基础理论,包括直流与交流电路分析方法、信号路径追踪技巧以及测量工具的正确使用。在实践方面,本文通过模拟故障类型与快速定位故障点,结合实战案例分析,展现了理论知识的实际应用。此外,本文还探讨了提升电路可靠性的策略,包括设计阶段的热设
精通Lingo:构建高效优化模型的7个策略和技巧

# 摘要
本文全面介绍了Lingo在优化问题中的应用,包括基础建模技巧、高级建模策略和模型优化与求解技巧。文章首先概述了Lingo的介绍及其在优化中的作用,详细阐述了线性规划、整数规划以及多目标优化模型的构建。随后,针对非线性规划和概率规划进行了深入探讨,并提供了有效的建模与求解策略。第五章通过供应链优化和资源分配问题的实际案例展示了Lingo的应用价值。最后一章强调了编程技巧与最佳实践,包括自定义函数、代码优化及与其它工具的集
Qt事件处理秘籍:快速掌握Linphone响应与调试技巧
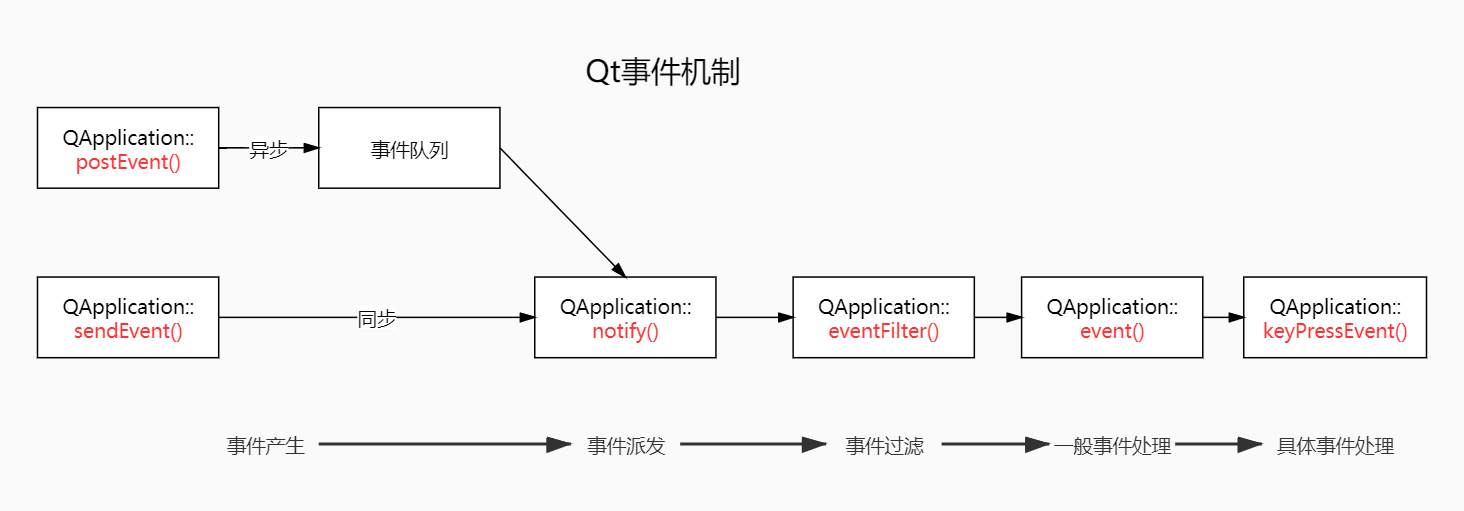
# 摘要
本文从基础到进阶,系统介绍了Qt事件处理机制及其在Linphone中的应用。第一章概述了Qt事件处理模型,包括事件循环机制、事件对象类型和事件过滤器。第二章深入探讨了信号与槽机制、多线程下的事件处理和事件处理的继承与扩展。第三章分析了Linphone的事件响应模型和实践应用。第四章提供了Qt事件调试的技巧和错误分析。第五章通过案例分析展示了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )