PIXHAWK 2.4.8飞行动力学建模实用课程:理论与实践双丰收
发布时间: 2024-11-29 06:09:15 阅读量: 42 订阅数: 69 

参考资源链接:[PIXHAWK 2.4.8飞控板原理图详解](https://wenku.csdn.net/doc/y22vy5gg7w?spm=1055.2635.3001.10343)
# 1. PIXHAWK 2.4.8飞行动力学概述
PIXHAWK作为一款先进的开源飞控系统,其飞行动力学模型是实现精确飞行控制的基石。本章旨在为读者提供一个关于PIXHAWK飞行动力学的宏观视图,以便为其后的深入分析打下基础。
飞行动力学通常涉及到飞行器在空间中的运动规律,它不仅包括飞行器的运动学特性,还包含动力学原理,以及由此衍生的飞行控制理论。PIXHAWK系统正是基于这些理论来实现对无人机稳定悬停、路径规划以及复杂任务执行的全面控制。
在后续章节中,我们将详细探讨飞行动力学的理论基础,PIXHAWK的系统架构,以及如何构建和优化飞行动力学模型。这将为无人机技术研究者和工程师提供宝贵的实践经验和理论指导。
# 2. 飞行动力学理论基础
## 2.1 飞行器运动学
### 2.1.1 运动学基本原理
在飞行器运动学中,基本原理涉及到速度和加速度的概念。速度是描述飞行器位置随时间变化的矢量量,而加速度则是描述速度随时间变化的矢量量。在三维空间内,飞行器的位置、速度和加速度通常通过直角坐标系(x, y, z)来描述。飞行器的运动学模型需要定义其位置、速度、加速度以及飞行器的几何姿态,例如俯仰角(pitch)、翻滚角(roll)和偏航角(yaw)。
#### 坐标系和飞行器定位
- **地球固定坐标系(Earth-fixed coordinate system)**: 用来描述飞行器相对于地球表面的位置。通常以地理坐标系中的经度、纬度和高度来确定。
- **机体坐标系(Aircraft body coordinate system)**: 与飞行器固连,用来描述飞行器相对于自身的姿态和运动。
每个坐标系内,都有相应的速度分量,例如U、V、W代表机体坐标系中的前向、侧向和垂直速度分量。飞行器的运动学方程需要考虑这些速度分量与坐标系之间的转换关系。
### 2.1.2 坐标系和飞行器定位
- **方向余弦矩阵(DCM)**: 用来描述机体坐标系与地球固定坐标系之间的关系,它包含了飞行器的姿态信息。方向余弦矩阵能够将地球固定坐标系下的速度、加速度转换为机体坐标系下的量,反之亦然。
- **四元数(Quaternion)**: 在现代飞行器控制系统中,经常用四元数来描述飞行器的姿态,因为它们避免了方向余弦矩阵的万向节锁定问题,并且在计算上更高效。
飞行器的运动学分析通常基于牛顿的运动定律,考虑到飞行器的质量和所受的外力,通过积分等数学运算可以得到飞行器的位置和速度信息。
## 2.2 飞行器动力学
### 2.2.1 力和力矩的平衡
飞行器的动力学涉及到力和力矩的平衡。飞行器受到的力包括重力、升力、阻力和推力等。力矩则由飞行器的重量、风力、发动机推力以及控制面的偏转产生。为了维持飞行稳定性,这些力和力矩必须在一定条件下达到平衡状态。飞行器的运动是由牛顿第二定律所描述的力和运动的关系决定的:
```math
F = ma
```
其中F是作用在飞行器上的合外力,m是飞行器的质量,a是飞行器的加速度。
### 2.2.2 动力学方程的建立
动力学方程的建立通常涉及到推导出牛顿第二定律的微分形式,即考虑质量随时间变化、速度和加速度的关系。飞行器的动力学方程可以表示为一组非线性微分方程,通常包含六个自由度的动力学模型,分别是沿三个坐标轴的平移运动和围绕这三个坐标轴的旋转运动。
#### 非线性微分方程示例
```math
\begin{cases}
\dot{x} = f_x(x, u, d) \\
\dot{y} = f_y(x, u, d) \\
\dot{z} = f_z(x, u, d) \\
\dot{\phi} = f_\phi(x, u, d) \\
\dot{\theta} = f_\theta(x, u, d) \\
\dot{\psi} = f_\psi(x, u, d)
\end{cases}
```
这里,\(x, y, z\)代表飞行器的位置,\(\phi, \theta, \psi\)代表飞行器的姿态角度,\(u\)代表控制输入,\(d\)代表干扰。\(f_x, f_y, f_z, f_\phi, f_\theta, f_\psi\)表示这些状态变量随时间变化的函数。
## 2.3 飞行器控制理论
### 2.3.1 稳定性分析
飞行器的稳定性分析是指在受到扰动后,飞行器能够自动恢复到平衡状态的能力。稳定性分析通常包括静态稳定性和动态稳定性分析,它们分别关注飞行器在受到微小扰动后平衡状态的恢复能力以及在受到持续或显著扰动时的运动响应。
#### 静态稳定性分析
通过线性化动力学方程,并考察特征方程的根来判断飞行器是否具有静稳定性。如果特征方程的所有根都在复平面的左半部分,即它们的实部都小于0,则飞行器是静态稳定的。
#### 动态稳定性分析
动态稳定性分析更为复杂,需要使用拉普拉斯变换等工具来分析系统的响应。在动态稳定性分析中,很重要的一点是确定系统的自然频率和阻尼比。
### 2.3.2 控制系统设计基础
飞行器的控制系统设计基于动力学模型和稳定性分析。控制系统的核心目标是确保飞行器能够达到预定的状态,并在受到外部扰动时维持稳定。控制系统设计通常依赖于经典控制理论和现代控制理论,其中经典控制理论包括PID控制,现代控制理论涉及状态空间方法和优化控制等。
#### PID控制理论
PID(比例-积分-微分)控制理论是一种常用的控制策略,它通过调整比例、积分和微分三个参数来实现控制目标。PID控制器的输出可以表示为:
```math
u(t) = K_p e(t) + K_i \int e(t)dt + K_d \frac{de(t)}{dt}
```
其中,\(u(t)\) 是控制输入,\(e(t)\) 是偏差,\(K_p\)、\(K_i\) 和 \(K_d\) 分别是比例、积分和微分增益。
PID控制可以处理许多动态问题,且实现简单,因而广泛应用于飞行控制领域。然而,在复杂的飞行场景中,需要更先进的控制方法来处理非线性、时变等特性。
#### 高级控制算法介绍
在飞行器控制系统中,高级控制算法如自适应控制、鲁棒控制和模糊控制等被用来应对更复杂的飞行条件。自适应控制能够根据飞行器当前的飞行环境和条件调整控制参数,而鲁棒控制则关注在不确定性和外部干扰下的控制性能。模糊控制通过模仿人类的决策过程来处理模糊和不确定的输入信息。
高级控制算法的引入为飞行器提供了更好的性能保证,特别是在无人机自主飞行和有人驾驶飞行器的辅助控制领域。
在本章节中,我们介绍了飞行动力学理论的基础知识,包括运动学基本原理、坐标系与飞行器定位、力和力矩的平衡以及动力学方程的建立。此外,飞行器控制理论的核心内容,即稳定性和控制系统设计的基础,也为后续章节深入探讨PIXHAWK飞控系统架构和飞行动力学模型构建打下了坚实的理论基础。下一章将详细介绍PIXHAWK飞控系统的硬件组件与软件架构,以及如何在这些组件和架构之上实现飞行控制算法。
# 3. PIXHAWK飞控系统架构
在第三章节,我们将深入了解PIXHAWK飞控系统的内部架构。 PIXHAWK飞控系统是一个高度模块化和集成化的飞行控制平台,其架构不仅支持多种飞行器,还允许开发者添加定制化的功能,以适应特定的应用场景。本章节将从PIXHAWK硬件组件、软件架构以及飞行控制算法三个方面,对飞控系统进行全面的探讨。
## 3.1 PIXHAWK硬件组件解析
PIXHAWK飞控硬件是整个系统的核心,它负责处理飞行数据,控制飞行器的姿态和位置,确保飞行任务的准确执行。我们将从以下两个子章节来详细解析PIXHAWK的硬件组件。
### 3.1.1 传感器与执行器
PIXHAWK飞控硬件系统中包含了多种传感器和执行器。传感器主要负责收集飞行环境和飞行器状态的数据,例如加速度计、陀螺仪、磁力计等,这些都是飞行控制系统中不可或缺的部分。执行器则包括电机和舵机,它们根据飞控系统发出的指令,调整飞行器的姿态和位置。
让我们来看一个具体的例子,展示如何通过代码配置PIXHAWK的传感器参数。
```c
#include <px4_config.h>
#include <px4自动驾驶仪.h>
// 初始化飞行器传感器
void init_sensors()
{
// 加速度计初始化代码示例
acceleration_init();
// 陀螺仪初始化代码示例
gyroscope_init();
// 磁力计初始化代码示例
magnetometer_init();
// 确保所有传感器校准完毕
if (sensors_calibrated())
{
// 如果传感器校准完成,则启动传感器
start_sensors();
}
else
{
// 否则输出校准错误
printf("Error: Sensors not calibrated.\n");
}
}
```
在这个代码段中,我们对加速度计、陀螺仪和磁力计进行了初始化,并进行了一个校验步骤。只有在所有传感器校准完成后,才会启动传感器。参数说明和逻辑分析都在注释中详细描述,确保执行流程的清晰和正确性。
### 3.1.2 主控制器及接口
PIXHAWK

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《PIXHAWK 2.4.8终极指南》是一部全面的专栏,深入解析了开源飞控PIXHAWK 2.4.8的方方面面。专栏涵盖了从原理图解读到系统架构、飞行算法、硬件接口、固件升级、调试工具、传感器校准、动力学建模、参数调整、任务规划、多旋翼控制、安全机制、无线电通信、地面站软件、编程接口、扩展模块、视觉定位、动力学模型优化、故障诊断和多机协同控制等一系列主题。通过深入浅出的讲解和丰富的图例,专栏旨在帮助读者全面了解PIXHAWK 2.4.8的原理、功能和使用技巧,从而提升飞控应用水平,实现更稳定、更安全的无人机飞行。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入理解锂电池保护板:电路图原理与应用实践详解
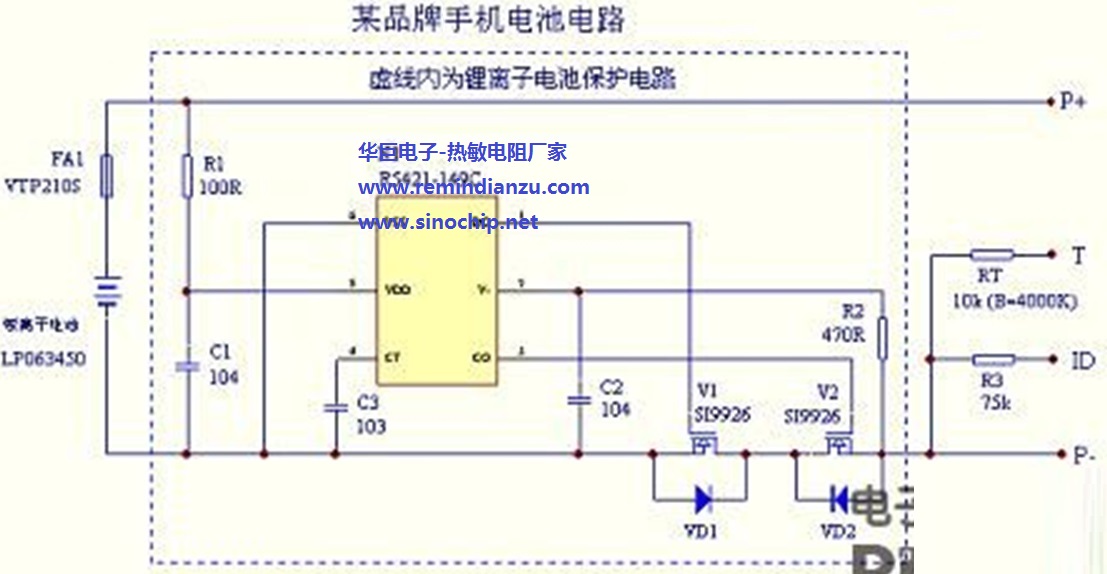
# 摘要
锂电池保护板作为关键的电池管理系统组件,对于确保电池安全、延长使用寿命至关重要。本文对锂电池保护板进行了全面介绍,分析了其电路图原理,并探讨了在不同电池类型中的应用与设计实践。文中详细解读了保护板的主要电路设计原理,包括过充、过放、短路和过流保护机制,以及微控制器集成与通信协议的应用。同时,本文也指出了保护板设计过程中的挑战,并通过案例分析提出了相应的解决方案。最后,本文展望了保护板的未来发展趋势,重点在于新型材料的应用以及智能化和物
【自动化操作录制系统】:易语言构建稳定可靠的实践教程

# 摘要
本文系统地介绍了自动化操作录制系统的设计与实现,包括易语言的特性、开发环境的搭建、基础语法,以及自动化操作录制技术的原理和脚本编写方法。通过对易语言的详细介绍和案例分析,本文阐述了如何构建稳定可靠的自动化操作录制系统,并探讨了进阶应用中的功能扩展、网络分布式处理和安全性管理。文章旨在为开发者提供一套完整的自动化操作录制解决方案,帮助他们在易语言环境下快速开发出高效且安
高级VLAN配置案例分析:企业级应用全面解读
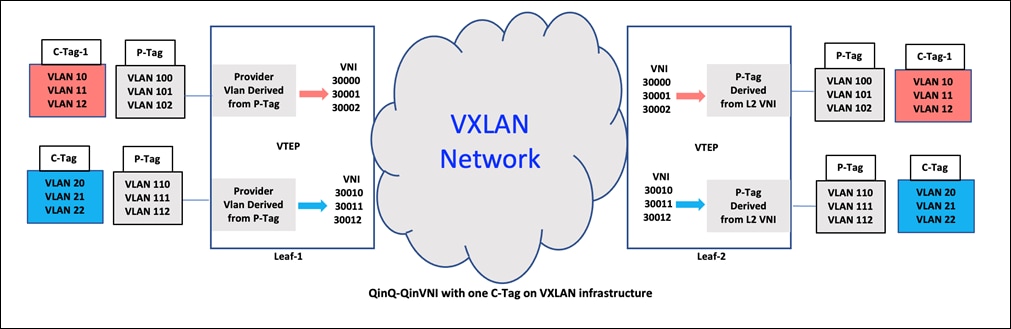
# 摘要
虚拟局域网(VLAN)技术是现代企业网络设计中的关键组成部分,其目的是为了提高网络资源的灵活性、安全性和管理效率。本文首先介绍了VLAN的基本概念和企业需求,接着深入探讨了
ROS新兵起步指南:Ubuntu下“鱼香肉丝”包的安装全教程

# 摘要
本文提供了ROS(Robot Operating System)的概述、安装与设置指南,以及基础概念和进阶操作的详细教程。首先,本文概述了ROS的基本架构和核心组件,并指导读者完成在Ubuntu环境下的ROS安装和配置过程。随后,深入探讨了ROS的基础概念,包括节点、话题、消息、服务和工作空间等。在此基础上,介绍了如
复变函数绘图秘籍:Matlab中三维艺术的创造与优化
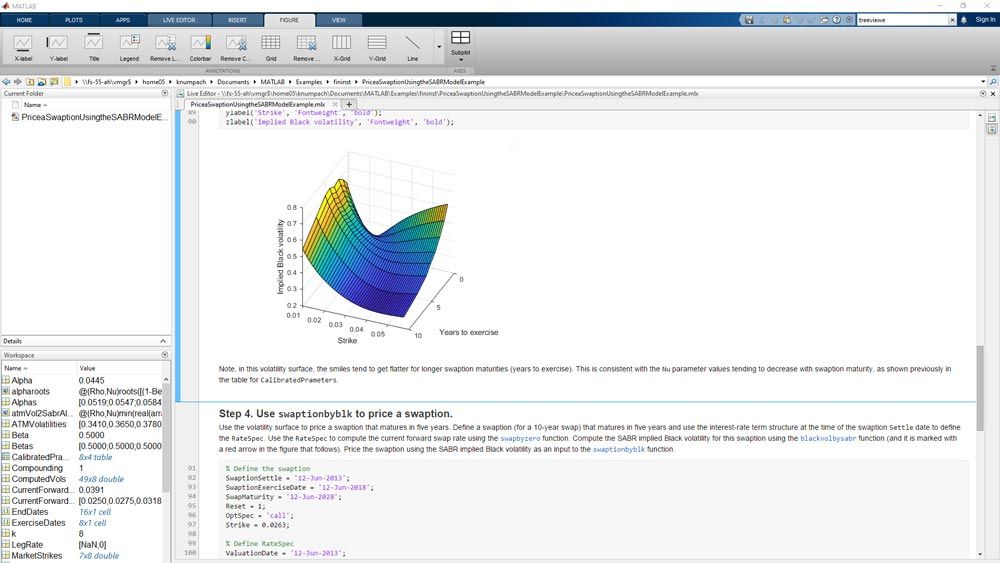
# 摘要
本文全面探讨了复变函数绘图的数学基础及其在Matlab中的应用。文章首先回顾了复变函数绘图的数学基础和Matlab的基本
【CPCI标准2.0中文版:全面入门与深入解析】:掌握核心应用与行业实践的终极指南
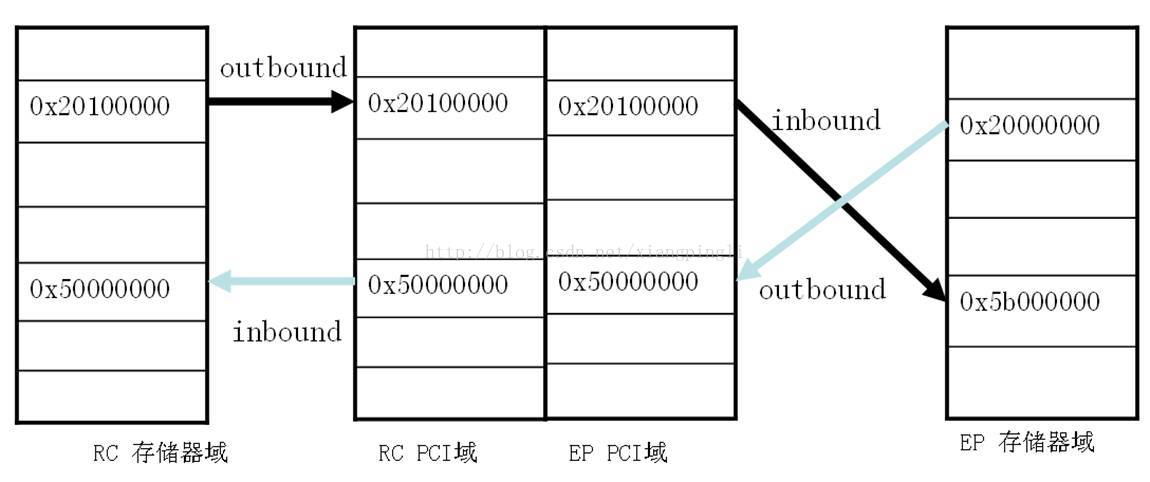
# 摘要
本文旨在全面介绍CPCI标准2.0的核心原理、技术规范及在不同行业中的应用。文章首先回顾了CPCI标准的发展历程,然后深入剖析其框架结构和关键技术,包括与PCI及PCI-X的对比、PCIe技术的演进及其可
计算机视觉目标检测:案例分析与实战技巧
# 摘要
计算机视觉中的目标检测是图像分析的核心问题之一,旨在识别和定位图像中特定物体的位置。本文首先概述了目标检测的发展历程和理论基础,然后深入分析了经典算法如R-CNN、YOLO和SSD的原理及性能。接着,文章探讨了目标检测在实战中的数据处理、模型训练和调优技巧,并通过多个行业案例加以说明。此外,本文还介绍了模型压缩、加速技术以及部署框架和工具,以实现
虚拟串口驱动7.2嵌入式系统集成与测试:专家指导手册
# 摘要
本文系统地阐述了虚拟串口驱动的概念、在嵌入式系统中的集成基础及其测试方法论,并通过实践案例分析来探讨驱动集成后的功能验证和故障诊断。文章首先介绍了虚拟串口驱动的基本概念,然后详细探讨了嵌入式系统的集成,包括驱动程序的作用、集成步骤和关键的技术要求。在实践部分,本文详细说明了集成前的准备工作、集成过程中的关键步骤以及集成后如何进行功能和性能测试。最后,文
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )