【AVR单片机入门到精通】:10步掌握AVR单片机开发秘籍
发布时间: 2024-07-09 12:35:30 阅读量: 89 订阅数: 39 

前端面试攻略(前端面试题、react、vue、webpack、git等工具使用方法)
# 1. AVR单片机简介与架构
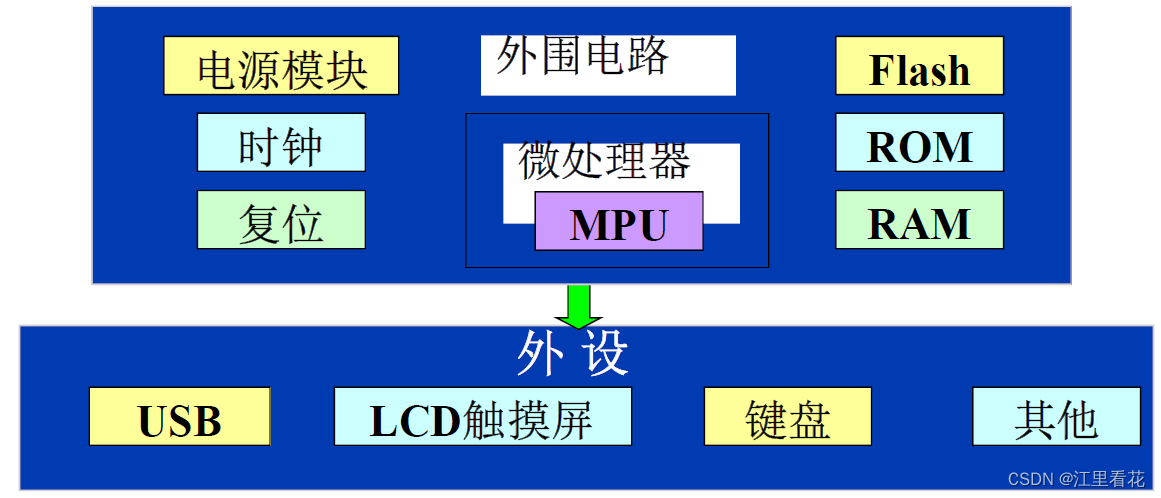
AVR单片机是一种由Atmel公司开发的8位RISC微控制器。它以其低功耗、高性能和广泛的应用而闻名。AVR单片机采用哈佛架构,其中程序和数据存储在独立的存储器空间中。这种架构提供了更高的执行效率和灵活性。
AVR单片机具有一个强大的指令集,包括算术、逻辑和分支指令。它还支持各种寻址方式,允许对存储器中的数据进行灵活访问。AVR单片机的时钟频率范围从1MHz到20MHz,使其适用于各种应用。
# 2. AVR单片机开发环境搭建
### 2.1 AVR单片机开发工具介绍
AVR单片机开发工具主要包括:
- **集成开发环境(IDE):**一个用于编写、编译和调试代码的软件平台。流行的IDE包括Atmel Studio、Visual Studio Code和Arduino IDE。
- **编译器:**将源代码转换为机器代码的软件。AVR单片机常用的编译器包括AVR-GCC和IAR Embedded Workbench。
- **调试器:**一个用于调试和分析代码的工具。调试器可以帮助查找错误、单步执行代码和检查寄存器值。
- **仿真器:**一个用于在计算机上模拟AVR单片机行为的工具。仿真器允许在实际硬件可用之前测试和调试代码。
### 2.2 开发环境的安装和配置
#### 2.2.1 Atmel Studio安装
1. 从Atmel官方网站下载Atmel Studio安装程序。
2. 运行安装程序并按照提示进行安装。
3. 安装完成后,启动Atmel Studio。
#### 2.2.2 AVR-GCC安装
1. 从AVR-GCC官方网站下载AVR-GCC安装程序。
2. 运行安装程序并按照提示进行安装。
3. 将AVR-GCC的bin目录添加到系统路径中。
#### 2.2.3 调试器安装
1. 从调试器供应商(如Atmel、SEGGER或Lauterbach)的官方网站下载调试器安装程序。
2. 运行安装程序并按照提示进行安装。
3. 将调试器的驱动程序添加到系统路径中。
### 2.3 调试器的使用
调试器用于调试和分析代码。调试器的常见功能包括:
- **单步执行:**逐行执行代码,允许检查变量值和寄存器状态。
- **断点:**在代码中设置断点,以便在执行到达该点时暂停。
- **寄存器查看:**查看和修改AVR单片机寄存器的值。
- **内存查看:**查看和修改程序内存和数据内存。
#### 2.3.1 调试器连接
1. 将调试器连接到AVR单片机。
2. 在IDE中选择调试器并配置连接设置。
3. 启动调试会话。
#### 2.3.2 代码调试
1. 在代码中设置断点。
2. 单步执行代码,检查变量值和寄存器状态。
3. 使用寄存器查看器和内存查看器分析代码行为。
4. 查找并修复错误。
**代码块:**
```c
#include <avr/io.h>
int main() {
DDRB = 0xFF; // Set all pins on PORTB as output
PORTB = 0x00; // Set all pins on PORTB to low
while (1) {
PORTB = PORTB ^ 0xFF; // Toggle all pins on PORTB
}
return 0;
}
```
**逻辑分析:**
此代码创建一个简单的闪烁LED程序。它将PORTB的所有引脚配置为输出,然后在一个无限循环中不断切换PORTB的所有引脚。
**参数说明:**
- `DDRB`:PORTB的数据方向寄存器,用于配置引脚的输入/输出方向。
- `PORTB`:PORTB的端口寄存器,用于设置引脚的逻辑电平。
- `0xFF`:一个十六进制常数,表示所有位都为1。
- `0x00`:一个十六进制常数,表示所有位都为0。
# 3.1 AVR单片机汇编语言基础
#### 3.1.1 指令集和寻址方式
AVR单片机汇编语言指令集丰富且高效,支持多种寻址方式,包括:
- **寄存器寻址:**直接操作寄存器的值。
- **立即寻址:**操作一个立即数,即常量值。
- **直接寻址:**操作一个存储在指定内存地址的数据。
- **间接寻址:**操作一个存储在寄存器中地址的数据。
- **相对寻址:**操作一个相对于当前指令地址的偏移量。
- **间接寻址带偏移量:**操作一个存储在寄存器中地址加上偏移量的数据。
#### 3.1.2 汇编指令的使用
AVR单片机汇编指令分为以下几类:
- **算术指令:**执行算术运算,如加、减、乘、除。
- **逻辑指令:**执行逻辑运算,如与、或、异或。
- **移位指令:**执行数据移位操作。
- **分支指令:**控制程序流程,如跳转、条件跳转。
- **I/O指令:**操作I/O端口。
- **中断指令:**处理中断。
以下是几个常用的汇编指令示例:
```汇编
; 加法指令
ADD R16, R17 ; 将R17的值加到R16中
; 减法指令
SUB R18, R19 ; 将R19的值从R18中减去
; 比较指令
CMP R20, R21 ; 比较R20和R21的值
; 跳转指令
JMP label ; 跳转到label标签处
; I/O指令
IN R22, PORTB ; 从PORTB读取数据到R22
```
### 3.2 AVR单片机C语言基础
#### 3.2.1 C语言语法和数据类型
AVR单片机C语言语法与标准C语言语法类似,支持以下基本数据类型:
- **整型:**char、short、int、long
- **浮点型:**float、double
- **指针:**指向特定数据类型的变量地址
#### 3.2.2 函数和指针的使用
C语言支持函数和指针的使用,可以实现代码的模块化和重用。
**函数:**
```c
void myFunction(int a, int b) {
// 函数体
}
```
**指针:**
```c
int *ptr = &variable; // ptr指向variable的地址
*ptr = 10; // 通过ptr修改variable的值
```
# 4. AVR单片机外设应用
### 4.1 AVR单片机I/O端口
#### 4.1.1 I/O端口的配置和操作
AVR单片机的I/O端口提供了与外部设备交互的接口。每个I/O端口可以被配置为输入或输出模式。
**配置I/O端口**
```c
DDRx = 0b11111111; //将端口x配置为输出模式
PORTx = 0b11111111; //将端口x输出高电平
```
**操作I/O端口**
```c
PINx = 0b11111111; //读取端口x的输入状态
PORTx = 0b11111111; //将端口x输出高电平
```
#### 4.1.2 中断处理
中断是一种当特定事件发生时触发程序执行的机制。AVR单片机支持多种中断源,包括I/O端口中断。
**配置I/O端口中断**
```c
GIMSK |= (1 << INT0); //使能INT0中断
MCUCR |= (1 << ISC00); //设置INT0中断触发方式为下降沿
```
**中断服务程序**
```c
ISR(INT0_vect) {
//中断处理代码
}
```
### 4.2 AVR单片机定时器
#### 4.2.1 定时器的配置和操作
定时器是一种用于生成精确时间间隔的硬件模块。AVR单片机有多个定时器,每个定时器都可以独立配置。
**配置定时器**
```c
TCCR0A = 0b00000011; //设置定时器0为CTC模式
TCCR0B = 0b00000101; //设置定时器0的时钟源为内部时钟,分频为8
OCR0A = 0xFF; //设置定时器0的比较值
```
**操作定时器**
```c
TCNT0 = 0; //复位定时器0
TIMSK0 |= (1 << OCIE0A); //使能定时器0的比较中断
```
#### 4.2.2 PWM输出
脉宽调制(PWM)是一种通过改变脉冲宽度来控制输出电压的调制技术。AVR单片机可以使用定时器生成PWM信号。
**配置PWM输出**
```c
TCCR0A = 0b10100011; //设置定时器0为快速PWM模式
TCCR0B = 0b00000101; //设置定时器0的时钟源为内部时钟,分频为8
OCR0A = 0xFF; //设置定时器0的比较值
```
**生成PWM信号**
```c
TCNT0 = 0; //复位定时器0
TIMSK0 |= (1 << OCIE0A); //使能定时器0的比较中断
```
### 4.3 AVR单片机ADC和DAC
#### 4.3.1 ADC和DAC的配置和操作
模数转换器(ADC)是一种将模拟信号转换为数字信号的器件。数模转换器(DAC)是一种将数字信号转换为模拟信号的器件。AVR单片机集成了ADC和DAC模块。
**配置ADC**
```c
ADMUX = 0b00000000; //设置ADC的输入通道为ADC0
ADCSRA = 0b10000000; //使能ADC,设置时钟分频为128
```
**读取ADC值**
```c
ADCSRA |= (1 << ADSC); //启动ADC转换
while (ADCSRA & (1 << ADSC)); //等待转换完成
uint16_t adcValue = ADC; //读取ADC值
```
**配置DAC**
```c
DACR = 0b00000000; //设置DAC的输出电压为0V
```
**输出DAC值**
```c
DACR = 0b11111111; //设置DAC的输出电压为5V
```
#### 4.3.2 数据采集和处理
ADC和DAC模块可以用于采集和处理模拟信号。例如,可以使用ADC采集温度传感器的数据,并使用DAC输出控制风扇的速度。
```c
uint16_t adcValue = ADC; //读取ADC值
uint8_t dacValue = (adcValue >> 4); //将ADC值转换为DAC值
DACR = dacValue; //输出DAC值
```
# 5.1 AVR单片机通信接口
### 5.1.1 串口通信
串口通信是AVR单片机常用的通信方式,它可以通过UART模块实现。UART模块支持异步和同步通信,其中异步通信是最常用的。
**异步通信配置步骤:**
1. 设置波特率:通过UBRRxL和UBRRxH寄存器设置波特率。
2. 设置数据格式:通过UCSRxA寄存器设置数据位、停止位和奇偶校验位。
3. 启用UART:通过UCSRxB寄存器启用UART。
4. 发送数据:通过UDRx寄存器发送数据。
5. 接收数据:通过UDRx寄存器接收数据。
**示例代码:**
```c
// 初始化UART
void uart_init(uint32_t baud_rate) {
// 设置波特率
UBRR0H = (F_CPU / (16 * baud_rate)) >> 8;
UBRR0L = (F_CPU / (16 * baud_rate)) & 0xFF;
// 设置数据格式
UCSRC0A = (1 << URSEL0) | (3 << UCSZ00);
// 启用UART
UCSRB0 |= (1 << RXEN0) | (1 << TXEN0);
}
// 发送数据
void uart_send(uint8_t data) {
while (!(UCSRA0 & (1 << UDRE0)));
UDR0 = data;
}
// 接收数据
uint8_t uart_receive() {
while (!(UCSRA0 & (1 << RXC0)));
return UDR0;
}
```
### 5.1.2 I2C通信
I2C通信是一种串行通信协议,它使用两根线(SDA和SCL)进行通信。AVR单片机可以通过TWI模块实现I2C通信。
**I2C通信配置步骤:**
1. 设置波特率:通过TWBR寄存器设置波特率。
2. 设置从机地址:通过TWAR寄存器设置从机地址。
3. 启用I2C:通过TWCR寄存器启用I2C。
4. 发送数据:通过TWDR寄存器发送数据。
5. 接收数据:通过TWDR寄存器接收数据。
**示例代码:**
```c
// 初始化I2C
void i2c_init(uint32_t baud_rate) {
// 设置波特率
TWBR = (F_CPU / (16 * baud_rate)) - 1;
// 启用I2C
TWCR |= (1 << TWEN);
}
// 发送数据
void i2c_send(uint8_t data) {
// 发送起始信号
TWCR = (1 << TWINT) | (1 << TWSTA) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
// 发送从机地址
TWDR = (0x50 << 1) | 0;
TWCR = (1 << TWINT) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
// 发送数据
TWDR = data;
TWCR = (1 << TWINT) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
// 发送停止信号
TWCR = (1 << TWINT) | (1 << TWSTO) | (1 << TWEN);
}
// 接收数据
uint8_t i2c_receive() {
// 发送起始信号
TWCR = (1 << TWINT) | (1 << TWSTA) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
// 发送从机地址
TWDR = (0x50 << 1) | 1;
TWCR = (1 << TWINT) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
// 接收数据
TWCR = (1 << TWINT) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
// 发送停止信号
TWCR = (1 << TWINT) | (1 << TWSTO) | (1 << TWEN);
return TWDR;
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面深入地介绍了 AVR 单片机的各个方面,涵盖了中断处理、串口通信、ADC 和 DAC 转换、PWM 调制、看门狗定时器、电源管理、低功耗设计、嵌入式系统设计、实时操作系统应用、ZigBee 通信以及故障诊断和调试。通过揭秘底层原理、提供实战案例和编程指南,本专栏旨在帮助读者全面掌握 AVR 单片机的编程技术,提升其嵌入式系统开发能力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【高级工具手册】SIMCA-P 11.0版分析功能全掌握:一册在手,分析无忧
# 摘要
本文针对SIMCA-P 11.0版软件进行了全面的介绍与分析,涵盖了基础分析功能、高级分析技巧以及该软件在不同行业中的应用案例。文章首先概述了SIMCA-P 11.0的总体功能,然后详细阐释了其在数据导入、预处理、基本统计分析、假设检验等方面的详细操作。在高级分析技巧部分,本文重点讲解了多变量数据分析、聚类分析、预测模型构建等高级功能。此外,文章还探讨了SIMCA-P在化工质量控制与生物医
数据管理高手:使用Agilent 3070 BT-BASIC提升测试准确度

# 摘要
Agilent 3070 BT-BASIC测试系统是电子行业广泛使用的自动测试设备(ATE),它通过集成先进的测试理论和编程技术,实现高效率和高准确度的电路板测试。本文首先概述了Agilent 3070 BT-BASIC的测试原理和基本组件,随后深入分析其编程基础、测试准确度的关键理论以及提升测试效率的高级技巧。通过介绍实践应用和进阶技巧,本文意在为电子工程师提供一个全面的指导,以优化数据管理、构建自动化测
【Eclipse项目导入:终极解决方案】
# 摘要
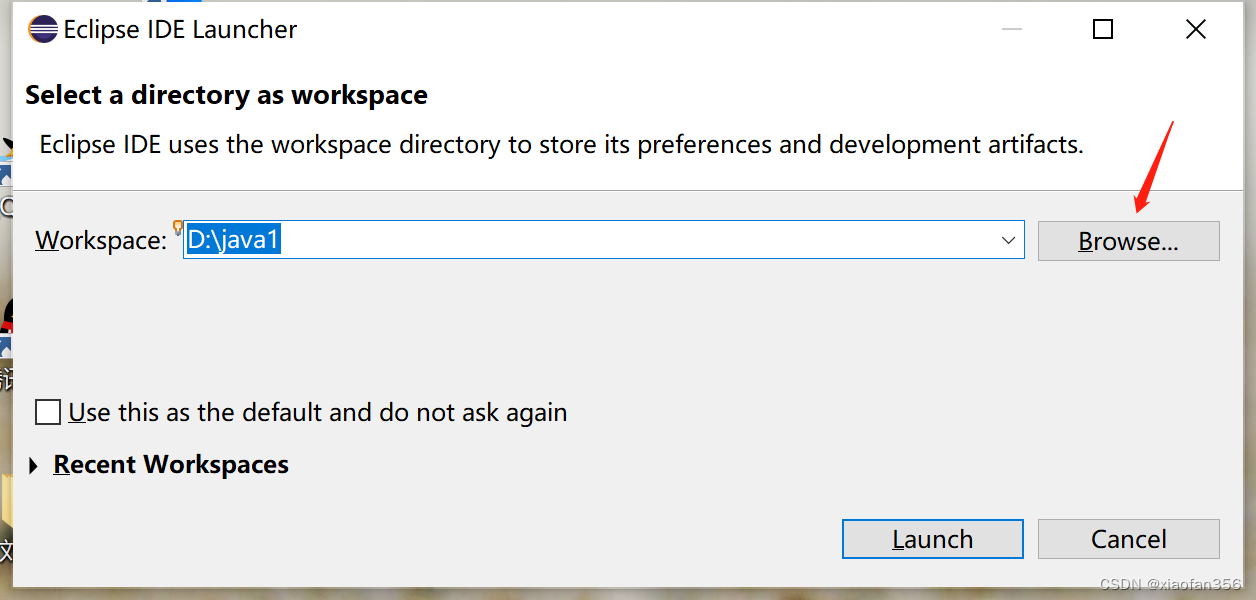
Eclipse作为一个流行的集成开发环境(IDE),在项目导入过程中可能会遇到多种问题和挑战。本文旨在为用户提供一个全面的Eclipse项目导入指南,涵盖从理论基础到实际操作的各个方面。通过深入分析工作空间与项目结构、导入前的准备工作、以及导入流程中的关键步骤,本文详细介绍了如何高效地导入各种类型的项目,包括Maven和Gradle项目以及多模块依赖项目。同时,为提高项目导入效率,提供了自动化导入技巧、项目
掌握TetraMax脚本编写:简化测试流程的专业技巧揭秘

# 摘要
TetraMax脚本作为一种自动化测试工具,广泛应用于软件开发的测试阶段。本文从基础到高级应用逐步解析TetraMax脚本编写的核心概念、结构、语法、命令、变量、函数、数据结构以及测试技巧和优化方法。进一步探讨了脚本的实战技巧,包括测试环境搭建
【摄像头模组调试速成】:OV5640 MIPI接口故障快速诊断与解决指南
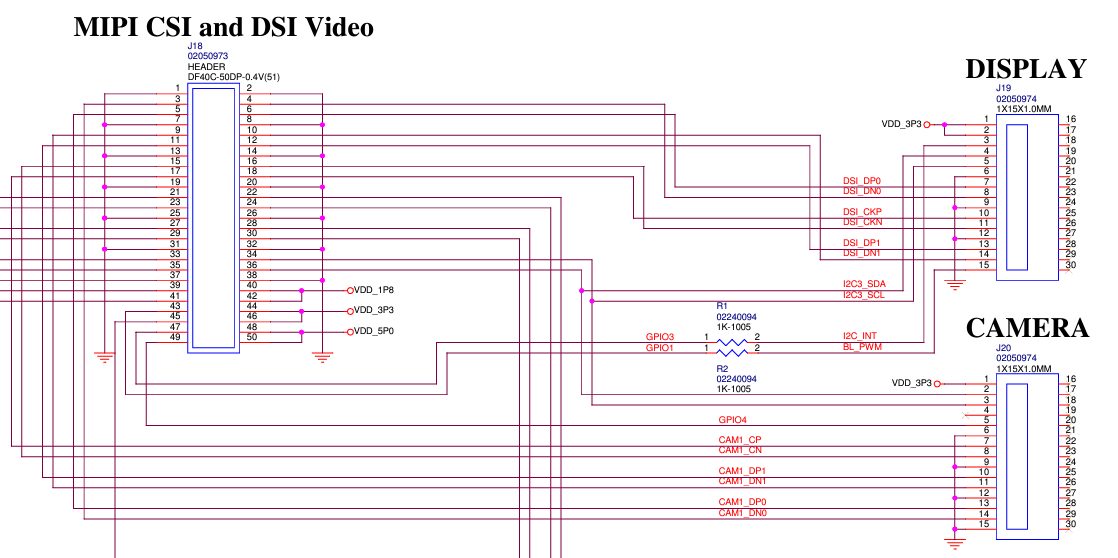
# 摘要
本文主要介绍了OV5640摄像头模组的技术细节、MIPI接口技术基础、常见故障分析与解决方法、以及高级调试技术。文章首先概述了OV5640摄像头模组,并详细解析了其MIPI接口技术,包括接口标准、DSI协议的深入理解以及调试工具和方法。接着,针对OV5640摄像头模组可能出现的故障类型进行了分析,并提出了故障诊断流程和解决实例。第四章通过介绍初始化、
反模糊化的商业策略:如何通过自动化提升企业效益
# 摘要
随着工业4.0的推进,自动化技术已成为企业提升效率、增强竞争力的关键战略。本文首先概述了自动化技术的定义、发展及其在商业中的角色和历史演变,随后探讨了软件与硬件自动化技术的分类、选择和关键组成要素,特别是在企业中的应用实践。第三章重点分析了自动化技术在生产流程、办公自动化系统以及客户服务中的具体应用和带来的效益。文章进一步从成本节约、效率提升、市场反应速度和企业创新等方面
【DisplayPort 1.4与HDMI 2.1对比分析】:技术规格与应用场景
# 摘要
DisplayPort 1.4与HDMI 2.1作为最新的显示接口技术,提供了更高的数据传输速率和带宽,支持更高的分辨率和刷新率,为高清视频播放、游戏、虚拟现实和专业显示设备应用提供了强大的支持。本文通过对比分析两种技术规格,探讨了它们在各种应用场景中的优势和性能表现,并提出针
揭秘WDR算法:从设计原理到高效部署
# 摘要
宽动态范围(WDR)算法作为改善图像捕捉在不同光照条件下的技术,已被广泛应用在视频监控、智能手机摄像头及智能驾驶辅助系统中。本文首先概述了WDR算法的设计原理,随后解析了其关键技术,包括动态范围扩张技术、信号处理与融合机制以及图像质量评估标准。通过案例分析,展示了WDR算法在实际应用中的集成和效果,同时探讨了算法的性能优化策略和维护部署。最后,本文展望了WDR算法与新兴技术的结合、行业趋势和研究伦理问题,指出了未来的发展方向和潜力。
# 关键字
宽动态范围;动态范围扩张;信号融合;图像质量评估;性能优化;技术应用案例
参考资源链接:[WDR算法详解与实现:解决动态范围匹配挑战](
【CTF密码学挑战全解析】:揭秘AES加密攻击的5大策略

# 摘要
本文综述了AES加密技术及其安全性分析,首先介绍了AES的基础概念和加密原理。随后,深入探讨了密码分析的基本理论,包括不同类型的攻击方法和它们的数学基础。在实践方法章节中,本研究详细分析了差分分析攻击、线性分析攻击和侧信道攻击的原理和实施步骤。通过分析AES攻击工具和经典案例研究,本文揭示了攻击者如何利用各种工具和技术实施有效攻击。最后,文章提出了提高AES加密安全性的一般建议和应对高级攻击的策略,强调了密钥管理、物理安全防护和系统级防
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )