CUDA并行计算程序结构与基本语法解析
发布时间: 2024-02-05 23:41:58 阅读量: 48 订阅数: 50 
# 1. 介绍CUDA并行计算
## 1.1 CUDA并行计算概述
CUDA(Compute Unified Device Architecture)是一个由NVIDIA推出的并行计算平台和编程模型,旨在利用图形处理器(GPU)进行高性能计算。
在传统的计算机系统中,CPU(中央处理器)负责执行串行任务,而GPU则用于图形渲染。然而,随着计算任务的复杂性不断增加,CPU单核的计算能力越来越难以满足需求。因此,通过将计算任务分配给GPU进行并行计算,可以大大提高计算效率。
CUDA利用了GPU的大规模并行处理能力,通过将任务划分为多个线程并行执行来提高计算速度。同时,CUDA还提供了丰富的库函数和优化技术,使得开发者能够更加方便地使用GPU进行并行计算。
## 1.2 CUDA架构与执行模型
CUDA架构采用了SIMD(Single Instruction Multiple Data)并行模式,即一个指令同时作用于多个数据。
CUDA将任务划分为多个线程块(block),而每个线程块又由多个线程(thread)组成。每个线程都可以并行执行相同的指令,但处理的数据不同。
每个线程块由一个或多个线程束(warp)组成,线程束是GPU中最小的线程调度单位。一个线程束中的所有线程同时执行相同的指令,但处理的数据不同。
CUDA使用网格(grid)来组织线程块的集合。网格由一个或多个线程格(block)组成,线程格是三维的,用于描述线程块的尺寸。
## 1.3 CUDA编程模型简介
在CUDA编程中,我们需要定义一个称为核函数(kernel)的特殊函数,用于在GPU上执行并行计算任务。
核函数由CPU调用,然后在GPU上并行执行。每个线程都会执行核函数中的代码,并且可以通过threadIdx和blockIdx等内置变量来获得自己的索引和线程块的索引。
除了核函数外,我们还可以使用一些CUDA提供的内置函数和库函数来进行并行计算、数据传输和内存管理等操作。
通过CUDA编程模型,开发者可以利用GPU的并行计算能力,加速各种科学计算、数据处理和机器学习等任务。
在接下来的章节中,我们将更详细地介绍CUDA的基本语法、数据类型、线程与块、内存管理和并行计算通信等内容,帮助读者深入理解CUDA并行计算的原理和应用。
# 2. CUDA基本语法与数据类型
### 2.1 CUDA编程环境搭建
#### 2.1.1 安装CUDA Toolkit
在开始学习CUDA编程之前,需要先搭建好CUDA编程的环境。首先,我们需要安装NVIDIA提供的CUDA Toolkit。
#### 2.1.2 下载CUDA Toolkit
在NVIDIA的官方网站(https://developer.nvidia.com/cuda-downloads)上可以下载到最新版本的CUDA Toolkit。根据自己系统的操作系统和CUDA版本的需求选择合适的版本进行下载。
#### 2.1.3 安装CUDA Toolkit
下载完成后,双击运行安装包,按照提示完成CUDA Toolkit的安装过程。
### 2.2 CUDA程序结构与执行过程
CUDA程序主要包含主机代码(Host Code)和设备代码(Device Code)。主机代码运行于CPU上,用于控制整个CUDA程序的执行流程。设备代码运行于GPU上,用于执行并行计算任务。
下面是一个简单的CUDA程序示例:
```python
#include <stdio.h>
// CUDA设备函数,用于执行并行计算任务
__global__ void cudaKernel() {
printf("Hello CUDA!\n");
}
int main() {
// 调用CUDA设备函数cudaKernel
cudaKernel<<<1, 1>>>();
// 同步设备与主机的执行
cudaDeviceSynchronize();
return 0;
}
```
在上面的示例中,`__global__`关键字表示这是一个CUDA设备函数。通过 `<<<1, 1>>>` 配置执行参数,指定了执行的线程块数和每个线程块中的线程数。在这个示例中,我们只使用了一个线程块和一个线程。
在主机代码中,通过调用CUDA设备函数`cudaKernel`来执行并行计算任务。最后,在主机代码中使用`cudaDeviceSynchronize()`来保证设备代码和主机代码的同步执行。
### 2.3 CUDA核函数与函数调用
CUDA核函数指的是在设备上执行的并行计算任务。核函数需要使用`__global__`关键字进行修饰,以表示它是一个CUDA设备函数。
下面是一个简单的CUDA核函数示例:
```python
#include <stdio.h>
// CUDA核函数,用于执行向量加法任务
__global__ void vectorAddition(int* a, int* b, int* c, int n) {
int tid = blockIdx.x * blockDim.x + threadIdx.x;
if (tid < n) {
c[tid] = a[tid] + b[tid];
}
}
int main() {
int n = 10000;
int* a = new int[n];
int* b = new int[n];
int* c = new int[n];
// 初始化输入向量a和b
for (int i = 0; i < n; i++) {
a[i] = i;
b[i] = i;
}
// 在设备上分配内存
int* d_a, * d_b, * d_c;
cudaMalloc((void**)&d_a, sizeof(int) * n);
cudaMalloc((void**)&d_b, sizeof(int) * n);
cudaMalloc((void**)&d_c, sizeof(int) * n);
// 将输入向量从主机内存复制到设备内存
cudaMemcpy(d_a, a, sizeof(int) * n, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, b, sizeof(int) * n, cudaMemcpyHostToDevice);
// 调用CUDA核函数进行向量加法操作
vectorAddition<<<(n + 255) / 256, 256>>>(d_a, d_b, d_c, n);
// 将结果向量从设备内存复制回主机内存
cudaMemcpy(c, d_c, sizeof(int) * n, cudaMemcpyDeviceToHost);
// 输出结果向量
for (int i = 0; i < n; i++) {
printf("%d ", c[i]);
}
printf("\n");
// 释放设备内存和主机内存
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_c);
delete[] a;
delete[] b;
delete[] c;
return 0;
}
```
在上面的示例中,`vectorAddition`是一个CUDA核函数,用于执行向量加法任务。核函数接受四个参数:输入向量`a`、输入向量`b`、输出向量`c`和向量的长度`n`。
在主机代码中,首先在主机端分配了输入向量`a`、`b`和输出向量`c`的内存空间,并进行了初始化。然后,在设备上通过`cudaMalloc`函数分配了相应的内存空间。接着,使用`cudaMemcpy`函数将输入向量从主机内存复制到设备内存。
然后,通过调用CUDA核函数`vectorAddition`进行向量加法操作。在调用核函数时,使用了一个线程块来处理向量中的每个元素。为了处理较大向量,我们使用了多个线程块。
最后,使用`cudaMemcpy`函数将结果向量从设备内存复制回主机内存,并输出结果向量。最后,释放设备内存和主机内存。
### 2.4 CUDA内置数据类型与存储修饰符
在CUDA编程中,除了C/C++的基本数据类型外,还提供了一些内置的数据类型和存储修饰符,用于方便地进行并行计算。
1. 内置数据类型
CUDA提供了一些内置的数据类型,如`int2`、`float3`等,用于表示2维整数、3维单精度浮点数等。这些数据类型可以方便地进行向量运算。
下面是一个使用`float3`进行向量加法的示例:
```python
#include <stdio.h>
typedef struct {
float x, y, z;
} float3;
__global__ void vectorAddition(float3* a, float3* b, float3* c, int n) {
int tid = blockIdx.x * blockDim.x + threadIdx.x;
if (tid < n) {
c[tid].x = a[tid].x + b[tid].x;
c[tid].y = a[tid].y + b[tid].y;
c[tid].z = a[tid].z + b[tid].z;
}
}
int main() {
int n = 10000;
float3* a = new float3[n];
float3* b = new float3[n];
float3* c = new float3[n];
// 初始化输入向量a和b
for (int i = 0; i < n; i++) {
a[i].x = i;
a[i].y = i;
a[i].z = i;
b[i].x = i;
b[i].y = i;
b[i].z = i;
}
// ...
return 0;
}
```
在上面的示例中,我们定义了一个`float3`结构体,表示3维单精度浮点数。在核函数`vectorAddition`中,可以直接进行向量相加操作。
2. 存储修饰符
CUDA提供了一些存储修饰符,用于控制变量的存储位置和访问方式。
- `__device__`:修饰符用于声明设备变量,即在设备上分配内存,并且可以在设备上进行访问。
- `__constant__`:修饰符用于声明常量变量,在设备上分配的内存被视为常量内存。
- `__shared__`:修饰符用于声明共享变量,即在线程块内的线程之间共享的变量。
下面是一个使用存储修饰符的示例:
```python
__constant__ float constantValue = 2.0;
__global__ void vectorMultiplication(float* a, float* b, float* c, int n) {
int tid = blockIdx.x * blockDim.x + threadIdx.x;
if (tid < n) {
c[tid] = a[tid] * b[tid] * constantValue;
}
}
int main() {
// ...
// 在设备上分配常量内存
cudaMemcpyToSymbol(constantValue, &value, sizeof(float));
// ...
return 0;
}
```
在上面的示例中,我们使用`__constant__`修饰符声明了一个常量变量`constantValue`,并将其值设置为2.0。在核函数`vectorMultiplication`中,我们可以直接使用常量变量进行计算。在主机代码中,使用`cudaMemcpyToSymbol`函数将常量的值从主机内存复制到设备上的常量内存中。
**总结**
第二章主要介绍了CUDA的基本语法与数据类型。讲解了如何搭建CUDA编程环境,介绍了CUDA程序的结构与执行过程,以及CUDA核函数的使用方法。同时,还介绍了CUDA内置的数据类型和存储修饰符,以及它们在CUDA编程中的应用。对于初学者来说,掌握了这些基本知识,才能更好地进行后续的CUDA并行计算。
# 3. CUDA线程与块
#### 3.1 理解CUDA线程与块的概念
在CUDA编程中,理解和有效使用线程与块是非常关键的。线程是执行计算的最小单元,而块则是包含多个线程的组合体。CUDA通过线程块和线程网格的方式来管理并行计算,线程块中的线程可以协同工作,并且可以通过共享内存进行数据交换。
#### 3.2 线程索引与线程同步
在CUDA中,线程块和线程都有自己的索引。可以使用这些索引来确定线程的任务和位置,从而对不同线程进行不同的计算。此外,线程同步也是非常重要的,可以使用`__syncthreads()`函数来实现线程之间的同步操作,确保线程之间的数据在计算时是一致的。
#### 3.3 线程间通信与共享内存
在CUDA编程中,线程间通信通常需要使用共享内存。共享内存是一种特殊的内存区域,不同线程可以在其中存储和读取数据,从而实现线程之间的通信和协同计算。合理地使用共享内存可以提高并行计算的效率和性能。
下面我们将通过代码示例来进一步说明线程与块的概念、索引和同步,以及共享内存的使用。
```python
import numpy as np
from numba import cuda
# 定义CUDA核函数
@cuda.jit
def parallel_computation(arr):
"""
CUDA核函数,对数组进行并行计算
"""
# 获取当前线程的全局位置和块位置
global_idx = cuda.grid(1) # 获取当前线程的全局位置
block_idx = cuda.blockIdx.x # 获取当前块的位置
# 线程同步
cuda.syncthreads()
# 使用共享内存进行计算
shared_mem = cuda.shared.array(10, dtype=float) # 定义共享内存
shared_mem[global_idx] = arr[global_idx] # 将数据拷贝到共享内存
cuda.syncthreads() # 等待所有线程将数据拷贝到共享内存
# 对共享内存中的数据进行计算
shared_mem[global_idx] *= 2
# 主程序
arr = np.array([1, 2, 3, 4, 5, 6, 7, 8, 9, 10], dtype=np.float64)
# 配置线程块和网格的大小
threads_per_block = 10
blocks_per_grid = 1
parallel_computation[blocks_per_grid, threads_per_block](arr)
# 输出计算结果
print(arr)
```
在上面的代码示例中,我们定义了一个CUDA核函数`parallel_computation`,并在主程序中对数组进行并行计算。在核函数中,我们演示了如何使用`cuda.grid`来获取线程的全局位置和块位置,以及如何使用共享内存进行线程间的通信和计算。经过并行计算后,程序将输出计算结果。
通过以上代码示例,我们展示了线程与块的概念、索引和同步,以及共享内存的使用。这些是CUDA并行计算中非常重要的概念和技术,对于编写高效的并行程序至关重要。
# 4. CUDA并行计算的内存管理
在使用CUDA进行并行计算时,合理的内存管理是非常重要的。本章将介绍CUDA的内存管理相关知识,包括全局内存与常量内存、共享内存与纹理内存,以及CUDA内存管理的优化技巧。
### 4.1 全局内存与常量内存
全局内存是CUDA中最常用的类型之一,它用于存储在设备上一维或多维的数据数组。全局内存的访问速度相比于设备内存来说较慢,因此在处理大规模数据时,应尽可能减少对全局内存的访问。
常量内存是一种只读内存,用于存储不会在计算过程中发生改变的数据。常量内存相较于全局内存,具有更高的访问速度,并且在每个线程块内部共享数据。
在CUDA中,我们可以通过使用`__device__`关键字定义全局变量,使用`__constant__`关键字定义常量变量。下面是一个示例代码,展示了如何在CUDA中使用全局内存和常量内存:
```python
__device__ int d_data[100]; // 定义全局内存数组
__constant__ int c_data[100]; // 定义常量内存数组
__global__ void kernel() {
int tid = blockIdx.x * blockDim.x + threadIdx.x;
// 使用全局内存
int value = d_data[tid];
// 使用常量内存
int constantValue = c_data[tid];
}
int main() {
// 初始化数据
int h_data[100];
for (int i = 0; i < 100; i++) {
h_data[i] = i;
}
// 将数据从主机内存拷贝到设备内存的全局内存
cudaMemcpyToSymbol(d_data, h_data, sizeof(int) * 100);
// 将数据从主机内存拷贝到设备内存的常量内存
cudaMemcpyToSymbol(c_data, h_data, sizeof(int) * 100);
// 启动CUDA核函数
kernel<<<1, 100>>>();
// 从设备内存拷贝数据到主机内存
cudaMemcpyFromSymbol(h_data, d_data, sizeof(int) * 100);
// 打印结果
for (int i = 0; i < 100; i++) {
printf("%d ", h_data[i]);
}
return 0;
}
```
在上述示例代码中,我们首先在设备端定义了全局内存数组`d_data`和常量内存数组`c_data`。然后在主机端,我们初始化了一个数据数组并将其拷贝到设备端的全局内存和常量内存中。在CUDA核函数中,我们使用了全局内存和常量内存进行计算,并将结果拷贝回主机端进行输出。需要注意的是,在使用`cudaMemcpyToSymbol`和`cudaMemcpyFromSymbol`进行内存拷贝时,我们需要使用符号名称来访问设备内存。
### 4.2 共享内存与纹理内存
共享内存是CUDA中用于在线程块内进行数据共享的一种特殊的存储区域。与全局内存相比,共享内存的访问速度更快,并且可以减少对全局内存的访问次数。使用共享内存可以显著提高CUDA程序的性能。
纹理内存是一种特殊的内存类型,用于对CUDA中的数据进行快速访问。纹理内存的特点是具有高速缓存和高速过滤能力,能够利用数据的局部性进行更高效的存取操作。
下面是一个示例代码,展示了如何在CUDA中使用共享内存和纹理内存:
```python
__global__ void kernel() {
__shared__ int s_data[100]; // 定义共享内存数组
texture<int, cudaTextureType1D, cudaReadModeElementType> texRef; // 定义纹理内存
int tid = blockIdx.x * blockDim.x + threadIdx.x;
// 使用共享内存
s_data[threadIdx.x] = tid;
__syncthreads(); // 确保所有线程都已经存入了共享内存
// 使用纹理内存
int value = tex1Dfetch(texRef, tid);
}
int main() {
// 初始化数据
int h_data[100];
for (int i = 0; i < 100; i++) {
h_data[i] = i;
}
// 定义纹理描述符
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc<int>();
// 创建CUDA数组
cudaArray* cuArray;
cudaMallocArray(&cuArray, &channelDesc, 100, 1);
// 将数据从主机内存拷贝到CUDA数组
cudaMemcpyToArray(cuArray, 0, 0, h_data, sizeof(int) * 100, cudaMemcpyHostToDevice);
// 设置纹理内存的属性
texRef.addressMode[0] = cudaAddressModeWrap;
texRef.filterMode = cudaFilterModePoint;
texRef.normalized = false;
// 绑定纹理内存
cudaBindTextureToArray(texRef, cuArray, channelDesc);
// 启动CUDA核函数
kernel<<<1, 100>>>();
return 0;
}
```
在上述示例代码中,我们首先在设备端定义了共享内存数组`s_data`和纹理内存`texRef`。然后我们在主机端先分配了一个CUDA数组,并将数据拷贝到该数组中。接着,我们设置了纹理内存的属性,并将其与CUDA数组进行绑定。最后,在CUDA核函数中,我们使用了共享内存和纹理内存进行数据读取。
### 4.3 CUDA内存管理与优化技巧
除了使用不同类型的内存,我们还可以通过一些优化技巧来提高CUDA程序的性能。以下是一些常见的CUDA内存管理与优化技巧:
- 对内存进行合并和对齐操作,以减少内存碎片,提高内存访问效率。
- 使用异步内存操作,通过使用CUDA流来实现多个计算任务的并行执行,以减少主机与设备之间的数据传输时间。
- 在全局内存和共享内存之间进行数据转移时,尽量减少数据的拷贝次数。
- 合理使用纹理内存进行数据读取,通过纹理内存的高速缓存和高速过滤能力来提高访问性能。
- 使用合适的内存分配策略,避免频繁的内存分配和释放操作。
通过合理地使用不同类型的内存,结合内存管理与优化技巧,我们可以进一步提高CUDA程序的性能,并充分发挥GPU的并行计算能力。
# 5. CUDA流与并行计算通信
在本章中,我们将深入探讨CUDA流与并行计算通信的相关内容。首先我们会介绍CUDA流和异步操作的概念,然后会详细讨论并行计算通信模式以及数据传输与异步通信的实现方法。
#### 5.1 CUDA流与异步操作
在CUDA中,流是一系列按顺序执行的操作的集合,可以包括数据传输、内核执行等。CUDA流的引入可以让多个操作并行执行,从而提高执行效率。在实际编程中,我们可以通过创建并指定CUDA流的方式来实现异步操作,从而最大程度地利用设备资源。
```python
import numpy as np
from numba import cuda
@cuda.jit
def kernel(array_in, array_out):
# kernel function code here
def main():
data_in = np.array([1, 2, 3, 4])
data_out = np.empty_like(data_in)
stream = cuda.stream()
with stream:
d_in = cuda.to_device(data_in)
d_out = cuda.device_array_like(data_in)
kernel[1, 1](d_in, d_out)
d_out.copy_to_host(data_out)
print("Output data:", data_out)
if __name__ == '__main__':
main()
```
上述代码演示了如何在CUDA中使用流实现异步操作。首先创建了一个CUDA流,然后在流中执行数据传输和内核函数,最后将计算结果拷贝回主机。通过使用流,数据传输和内核执行可以在不同的流中并行执行,提高了整体的执行效率。
#### 5.2 并行计算通信模式
CUDA中的并行计算通信模式包括主机到设备的数据传输、设备到主机的数据传输以及设备到设备的数据传输。针对不同的通信模式,我们可以选择合适的API来实现数据的传输和通信。
```python
import numpy as np
from numba import cuda
def main():
data = np.array([1, 2, 3, 4])
d_data = cuda.to_device(data)
# 主机到设备的数据传输
d_data.copy_to_device(data)
# 设备到主机的数据传输
d_data.copy_to_host(data)
# 设备到设备的数据传输
d_data_2 = cuda.device_array_like(data)
cuda.device_to_device_copy(d_data, d_data_2)
if __name__ == '__main__':
main()
```
在上述代码中,我们展示了如何使用CUDA API实现主机到设备、设备到主机以及设备到设备的数据传输操作。
#### 5.3 数据传输与异步通信
在实际的CUDA程序开发中,我们通常会面临大量数据的传输和通信需求。为了提高程序的性能,我们可以通过异步通信的方式来优化数据传输操作。CUDA中提供了异步数据传输的API,可以在数据传输过程中执行其他计算任务,充分利用设备的并行能力。
```python
import numpy as np
from numba import cuda
def main():
data = np.array([1, 2, 3, 4])
d_data = cuda.to_device(data)
stream = cuda.stream()
with stream:
# 异步数据传输
d_data.copy_to_host(data)
# 执行其他计算任务
# 等待异步数据传输完成
stream.synchronize()
if __name__ == '__main__':
main()
```
上述代码展示了如何在CUDA中使用流实现异步数据传输操作。通过使用流,我们可以在数据传输过程中执行其他计算任务,从而充分利用设备资源,提高程序的整体性能。
通过本章的学习,读者将能够深入理解CUDA流与并行计算通信的相关概念,并掌握实际编程中的应用技巧。
# 6. CUDA程序性能优化与调试技巧
在本章中,我们将讨论如何通过优化技巧和调试工具来提高CUDA程序的性能,并处理潜在的错误。通过本章的学习,读者将了解如何用更高效的方式编写CUDA程序,以及如何有效地调试和处理错误。
#### 6.1 CUDA程序性能分析工具
为了优化CUDA程序的性能,我们首先需要了解程序的瓶颈所在。CUDA提供了一系列性能分析工具,其中包括:
- **nvprof**: 用于分析CUDA应用程序的性能,了解运行时间和内存占用情况。
- **Nsight Systems**: 提供了全面的系统级性能分析工具,可用于查看CUDA程序在GPU上的行为,并定位性能瓶颈。
- **Nsight Compute**: 用于深入分析CUDA应用程序的性能瓶颈,包括指令级分析和内存访问模式。
#### 6.2 CUDA程序高效编写技巧
在编写CUDA程序时,一些高效编写技巧可以帮助提高程序的性能,包括:
- **合并全局内存访问**: 通过合并内存访问来减少全局内存带宽的占用,提高内存读取效率。
- **减少同步点**: 减少线程间同步的次数,以避免线程阻塞,提高程序并行度。
- **使用共享内存**: 合理使用共享内存来减少全局内存访问,提高数据访问速度。
#### 6.3 CUDA程序调试与错误处理
调试是程序开发的重要环节,以下是一些CUDA程序调试和错误处理的技巧:
- **使用cuda-memcheck**: 可用于检测CUDA程序中的内存错误,并提供详细的报告。
- **使用assert语句**: 在CUDA程序中加入assert语句,帮助定位可能存在的逻辑错误。
- **利用错误代码**: CUDA提供了丰富的错误代码,可以通过检查错误代码来定位问题所在,并进行相应的处理。
通过以上优化技巧和调试工具,我们可以更好地编写和调试CUDA程序,提高程序的性能并有效处理可能存在的错误。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《CUDA并行计算编程基础与应用》是一本专注于介绍CUDA并行计算的专栏。其中的文章涵盖了从CUDA编程环境的搭建与配置,到数据传输与内存管理技术的应用,再到线程同步与互斥技术的精解,还包括了CUDA纹理内存与常量内存在并行计算中的应用。通过这些文章,读者能够了解到如何搭建CUDA编程环境以及配置相关指南,掌握CUDA并行计算中的数据传输与内存管理技术,深入理解CUDA并行计算中的线程同步与互斥技术,以及学习CUDA纹理内存与常量内存在并行计算中的实际应用。无论是初学者还是有一定经验的开发者,本专栏都能为他们提供深入浅出、全面系统的CUDA并行计算编程知识,帮助他们在实际应用中更好地利用CUDA提高并行计算的效率。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【NLP新范式】:CBAM在自然语言处理中的应用实例与前景展望

# 1. NLP与深度学习的融合
在当今的IT行业,自然语言处理(NLP)和深度学习技术的融合已经产生了巨大影响,它们共同推动了智能语音助手、自动翻译、情感分析等应用的发展。NLP指的是利用计算机技术理解和处理人类语言的方式,而深度学习作为机器学习的一个子集,通过多层神经网络模型来模拟人脑处理数据和创建模式
故障恢复计划:机械运动的最佳实践制定与执行

# 1. 故障恢复计划概述
故障恢复计划是确保企业或组织在面临系统故障、灾难或其他意外事件时能够迅速恢复业务运作的重要组成部分。本章将介绍故障恢复计划的基本概念、目标以及其在现代IT管理中的重要性。我们将讨论如何通过合理的风险评估与管理,选择合适的恢复策略,并形成文档化的流程以达到标准化。
## 1.1 故障恢复计划的目的
故障恢复计划的主要目的是最小化突发事件对业务的
全球高可用部署:MySQL PXC集群的多数据中心策略

# 1. 高可用部署与MySQL PXC集群基础
在IT行业,特别是在数据库管理系统领域,高可用部署是确保业务连续性和数据一致性的关键。通过本章,我们将了解高可用部署的基础以及如何利用MySQL Percona XtraDB Cluster (PXC) 集群来实现这一目标。
## MySQL PXC集群的简介
MySQL PXC集群是一个可扩展的同步多主节点集群解决方案,它能够提供连续可用性和数据一致
MATLAB遗传算法与模拟退火策略:如何互补寻找全局最优解

# 1. 遗传算法与模拟退火策略的理论基础
遗传算法(Genetic Algorithms, GA)和模拟退火(Simulated Annealing, SA)是两种启发式搜索算法,它们在解决优化问题上具有强大的能力和独特的适用性。遗传算法通过模拟生物
提升Android二维码扫描性能:分析问题,优化策略全解析
+Decoding+Algorithm.jpg)
# 1. Android二维码扫描技术概述
二维码扫描技术是移动互联网中的一项关键技术,它赋予移动设备识别和解析二维条码的能力,从而实现数据从现实世界到数字世界的无缝转换。在Android平台上,这项技术广泛应用于支付、身份验证、信息获取等多种场景。在深入探讨二维码扫描的性能问题及优化策略之前,本章节将对Android二维码扫描技术的基
Python算法实现捷径:源代码中的经典算法实践

# 1. Python算法实现捷径概述
在信息技术飞速发展的今天,算法作为编程的核心之一,成为每一位软件开发者的必修课。Python以其简洁明了、可读性强的特点,被广泛应用于算法实现和教学中。本章将介绍如何利用Python的特性和丰富的库,为算法实现铺平道路,提供快速入门的捷径
拷贝构造函数的陷阱:防止错误的浅拷贝
# 1. 拷贝构造函数概念解析
在C++编程中,拷贝构造函数是一种特殊的构造函数,用于创建一个新对象作为现有对象的副本。它以相同类类型的单一引用参数为参数,通常用于函数参数传递和返回值场景。拷贝构造函数的基本定义形式如下:
```cpp
class ClassName {
public:
ClassName(const ClassName& other); // 拷贝构造函数
【JavaScript人脸识别的用户体验设计】:界面与交互的优化
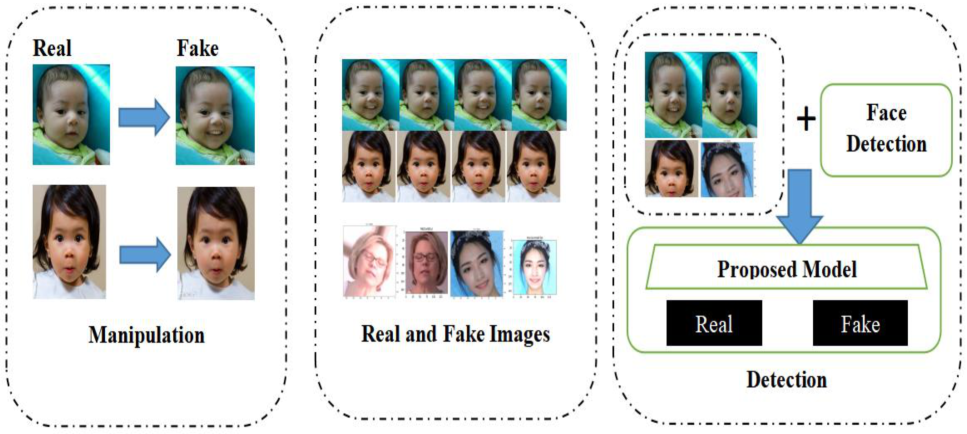
# 1. JavaScript人脸识别技术概述
## 1.1 人脸识别技术简介
人脸识别技术是一种通过计算机图像处理和识别技术,让机器能够识别人类面部特征的技术。近年来,随着人工智能技术的发展和硬件计算能力的提升,JavaScript人脸识别技术得到了迅速的发展和应用。
## 1.2 JavaScript在人脸识别中的应用
JavaScript作为一种强
【深度学习在卫星数据对比中的应用】:HY-2与Jason-2数据处理的未来展望

# 1. 深度学习与卫星数据对比概述
## 深度学习技术的兴起
随着人工智能领域的快速发展,深度学习技术以其强大的特征学习能力,在各个领域中展现出了革命性的应用前景。在卫星数据处理领域,深度学习不仅可以自动
MATLAB时域分析:动态系统建模与分析,从基础到高级的完全指南
# 1. MATLAB时域分析概述
MATLAB作为一种强大的数值计算与仿真软件,在工程和科学领域得到了广泛的应用。特别是对于时域分析,MATLAB提供的丰富工具和函数库极大地简化了动态系统的建模、分析和优化过程。在开始深入探索MATLAB在时域分析中的应用之前,本章将为读者提供一个基础概述,包括时域分析的定义、重要性以及MATLAB在其中扮演的角色。
时域
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )