MATLAB条件语句在控制系统中的应用:实现反馈控制和状态机的权威解析
发布时间: 2024-06-15 21:29:50 阅读量: 68 订阅数: 27 

# 1. MATLAB条件语句基础**
MATLAB条件语句是控制程序执行流的强大工具。它们允许程序根据特定条件执行不同的代码块。MATLAB中常用的条件语句包括`if`、`elseif`和`else`。
**if语句**
`if`语句用于执行一个代码块,如果一个条件为真。语法如下:
```
if condition
% 代码块
end
```
例如,以下代码块检查变量`x`是否大于0,如果为真,则打印"x大于0":
```
x = 5;
if x > 0
disp("x大于0")
end
```
**elseif和else语句**
`elseif`和`else`语句用于执行替代代码块,如果`if`条件为假。语法如下:
```
if condition1
% 代码块 1
elseif condition2
% 代码块 2
else
% 代码块 3
end
```
例如,以下代码块检查变量`x`是否大于0、等于0或小于0,并相应地打印一条消息:
```
x = 0;
if x > 0
disp("x大于0")
elseif x == 0
disp("x等于0")
else
disp("x小于0")
end
```
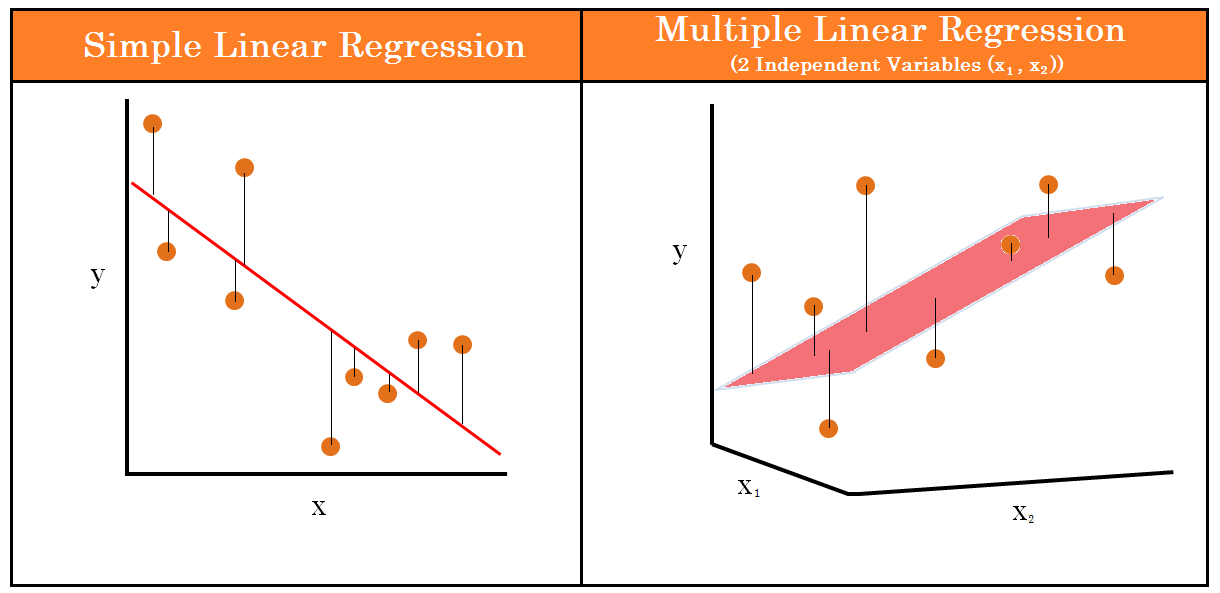
# 2. 反馈控制中的MATLAB条件语句
在反馈控制系统中,条件语句用于根据控制系统的状态和输入信号来调整控制器的输出。这使得控制器能够根据系统的行为进行动态调整,从而实现更精确和鲁棒的控制。
### 2.1 PID控制中的条件语句
PID(比例积分微分)控制器是反馈控制系统中广泛使用的控制器类型。它通过将系统的误差(期望值与实际值之间的差)与比例、积分和微分增益相乘来计算控制输出。
#### 2.1.1 比例积分微分(PID)控制器的基本原理
PID控制器的基本原理如下:
- **比例增益(Kp):**根据误差的当前值调整控制输出。
- **积分增益(Ki):**根据误差随时间的累积值调整控制输出。
- **微分增益(Kd):**根据误差变化率调整控制输出。
#### 2.1.2 MATLAB中的PID控制器实现
在MATLAB中,可以使用`pid`函数来实现PID控制器。该函数需要三个增益值(Kp、Ki、Kd)和一个误差信号作为输入。
```matlab
% 定义PID控制器增益
Kp = 1;
Ki = 0.1;
Kd = 0.01;
% 定义误差信号
error = 1;
% 创建PID控制器对象
pid_controller = pid(Kp, Ki, Kd);
% 计算控制输出
control_output = pid_controller(error);
```
**代码逻辑分析:**
1. 定义PID控制器增益值(Kp、Ki、Kd)。
2. 定义误差信号(error)。
3. 创建PID控制器对象(pid_controller)。
4. 计算控制输出(control_output)。
### 2.2 状态反馈控制中的条件语句
状态反馈控制器是一种反馈控制系统,它使用系统的状态(如位置、速度、加速度)来计算控制输出。这使得控制器能够根据系统的内部状态进行更精确的控制。
#### 2.2.1 状态反馈控制器的设计原理
状态反馈控制器的设计原理如下:
1. **状态空间模型:**将系统表示为状态空间方程组。
2. **状态反馈增益矩阵:**设计一个增益矩阵,将系统的状态反馈到控制输入中。
3. **控制输出:**通过将状态反馈增益矩阵与系统的状态相乘来计算控制输出。
#### 2.2.2 MATLAB中的状态反馈控制器实现
在MATLAB中,可以使用`lqr`函数来设计状态反馈控制器。该函数需要系统的状态空间方程组和权重矩阵作为输入。
```matlab
% 定义系统的状态空间方程组
A = [1 0; 0 1];
B = [0; 1];
C = [1 0];
D = 0;
% 定义权重矩阵
Q = [1 0; 0 1];
R = 1;
% 设计状态反馈控制器
[K, ~, ~] = lqr(A, B, Q, R);
% 定义系统的状态
x = [1; 0];
% 计算控制输出
control_output = -K * x;
```
**代码逻辑分析:**
1. 定义系统的状态空间方程组(A、B、C、D)。
2. 定义权重矩阵(Q、R)。
3. 设计状态反馈控制器(K)。
4. 定义系统的状态(x)。
5. 计算控制输出(control_output)。
# 3. 状态机中的MATLAB条件语句
状态机是一种广泛用于建模和仿真具有离散状态和事件驱动的系统的数学模型。MATLAB提供了强大的工具来实现状态机,其中条件语句发挥着至关重要的作用。
### 3.1 离散状态机的建模和仿真
#### 3.1.1 离散状态机的基本概念
离散状态机由一组状态、事件和转换组成。状态表示系统的当前情况,事件触发状态之间的转换,而转换定义了系统从一个状态到另一个状态的行为。
#### 3.1.2 MATLAB中的状态机仿真
MATLAB中的Stateflow工具箱提供了用于建模和仿真离散状态机的图形化界面。Stateflow模型由状态图、事件和转换组成。
```
% 创建一个简单的离散状态机
stateflow('MyStateMachine');
% 定义状态
add_state('State1');
add_state('State2');
% 定义事件
add_event('Event1');
% 定义转换
add_transition('State1', 'State2', 'Event1');
% 仿真状态机
simulate(MyStateMachine);
```
**代码逻辑分析:**
* `stateflow('MyStateMachine')` 创建一个名为 `MyStateMachine` 的状态机模型。
* `add_state('State1')` 和 `add_state('State2')` 添加两个状态 `State1` 和 `State2`。
* `add_event('Event1')` 添加一个事件 `Event1`。
* `add_transition('State1', 'State2', 'Event1')` 添加一个从 `State1` 到 `State2` 的转换,该转换由 `Event1` 触发。
* `simulate(MyStateMachine)` 仿真状态机。
### 3.2 混合状态机的建模和仿真
#### 3.2.1 混合状态机的特点和应用
混合状态机是离散状态机和连续状态机的混合体。它们具有离散状态和连续变量,并且可以处理离散事件和连续时间行为。混合状态机广泛用于建模和仿真具有混合动力学特性的系统,例如机器人和控制系统。
#### 3.2.2 MATLAB中的混合状态机仿真
MATLAB中的Simulink工具箱提供了用于建模和仿真混合状态机的图形化界面。Simulink模型由状态图、连续动力学方程和事件触发器组成。
```
% 创建一个简单的混合状态机
simulink('MyHybridStateMachine');
% 定义状态
add_block('Stateflow/State', 'State1');
add_block('Stateflow/State', 'State2');
% 定义连续动力学方程
add_block('Simulink/Continuous/Integrator', 'Integrator');
set_param('Integrator', 'InitialCondition', '0');
% 定义事件触发器
add_block('Stateflow/Event Trigger', 'EventTrigger');
set_param('EventTrigger', 'Event', 'Event1');
% 连接组件
add_line('State1/1', 'Integrator/1');
add_line('Integrator/1', 'State2/1');
add_line('EventTrigger/1', 'State1/2');
% 仿真状态机
simulate(MyHybridStateMachine);
```
**代码逻辑分析:**
* `simulink('MyHybridStateMachine')` 创建一个名为 `MyHybridStateMachine` 的混合状态机模型。
* `add_block('Stateflow/State', 'State1')` 和 `add_block('Stateflow/State', 'State2')` 添加两个状态 `State1` 和 `State2`。
* `add_block('Simulink/Continuous/Integrator', 'Integrator')` 添加一个积分器块,它表示连续动力学方程。
* `add_block('Stateflow/Event Trigger', 'EventTrigger')` 添加一个事件触发器块,它表示事件触发器。
* `add_line('State1/1', 'Integrator/1')`、`add_line('Integrator/1', 'State2/1')` 和 `add_line('EventTrigger/1', 'State1/2')` 连接各个组件。
* `simulate(MyHybridStateMachine)` 仿真状态机。
# 4. MATLAB条件语句在控制系统中的高级应用
### 4.1 鲁棒控制中的条件语句
#### 4.1.1 鲁棒控制器的设计方法
鲁棒控制旨在设计控制器,使其在系统参数和扰动存在不确定性的情况下仍能保持稳定性和性能。MATLAB中的鲁棒控制工具箱提供了各种工具,用于设计和分析鲁棒控制器。
**H∞控制:**H∞控制是一种鲁棒控制方法,通过最小化系统的H∞范数来设计控制器。H∞范数衡量系统在最坏情况下的扰动下的输出响应。
**μ合成:**μ合成是一种鲁棒控制方法,通过最小化系统的结构奇异值来设计控制器。结构奇异值衡量系统对扰动的敏感性。
#### 4.1.2 MATLAB中的鲁棒控制器实现
```matlab
% 系统模型
sys = ss(A, B, C, D);
% 扰动模型
W = ss(Aw, Bw, Cw, Dw);
% H∞控制器设计
HinfController = hinfsyn(sys, W);
% μ合成控制器设计
MuController = musyn(sys, W);
```
### 4.2 非线性控制中的条件语句
#### 4.2.1 非线性控制器的设计原理
非线性控制器用于控制具有非线性动力学的系统。MATLAB中的非线性控制工具箱提供了各种工具,用于设计和分析非线性控制器。
**滑模控制:**滑模控制是一种非线性控制方法,通过将系统状态限制在一个称为滑模的特定子流形上来实现控制。
**反馈线性化:**反馈线性化是一种非线性控制方法,通过使用状态反馈将非线性系统线性化来实现控制。
#### 4.2.2 MATLAB中的非线性控制器实现
```matlab
% 非线性系统模型
sys = nonlinearSystem();
% 滑模控制器设计
SlidingController = slidingController(sys);
% 反馈线性化控制器设计
FeedbackLinearizingController = feedbackLinearizingController(sys);
```
# 5. MATLAB条件语句在控制系统中的最佳实践**
**5.1 条件语句的优化和调试**
**5.1.1 条件语句的性能优化技巧**
* **避免嵌套条件语句:**嵌套条件语句会降低代码的可读性和可维护性,并可能导致性能问题。
* **使用矢量化运算:**对于涉及数组或矩阵的条件语句,使用矢量化运算可以显著提高性能。
* **预分配内存:**在循环中使用条件语句时,预分配内存可以防止不必要的内存分配和释放,从而提高性能。
**5.1.2 条件语句的调试方法**
* **使用断点:**在条件语句中设置断点,可以帮助调试代码并了解执行流程。
* **检查输入值:**确保条件语句中使用的输入值有效且在预期范围内。
* **使用日志记录:**在条件语句中添加日志记录语句,可以帮助跟踪执行流程和识别错误。
**5.2 MATLAB条件语句的应用案例**
**5.2.1 自适应巡航控制系统**
自适应巡航控制系统使用条件语句来根据与前车的距离和速度调整车辆的速度。以下代码段展示了如何使用条件语句实现自适应巡航控制:
```matlab
% 输入参数
current_speed = 60; % 当前速度(km/h)
target_speed = 70; % 目标速度(km/h)
distance_to_car_ahead = 50; % 与前车的距离(m)
% 条件语句
if distance_to_car_ahead < 30
% 如果距离小于 30m,减速
new_speed = current_speed - 5;
elseif distance_to_car_ahead > 50
% 如果距离大于 50m,加速
new_speed = current_speed + 5;
else
% 如果距离在 30m 到 50m 之间,保持当前速度
new_speed = current_speed;
end
% 更新速度
current_speed = new_speed;
```
**5.2.2 无人机姿态控制系统**
无人机姿态控制系统使用条件语句来根据传感器数据调整无人机的姿态。以下代码段展示了如何使用条件语句实现无人机姿态控制:
```matlab
% 输入参数
roll_angle = 10; % 滚转角(度)
pitch_angle = 5; % 俯仰角(度)
yaw_angle = 0; % 偏航角(度)
% 条件语句
if roll_angle > 15
% 如果滚转角大于 15 度,向左调整
roll_adjustment = -1;
elseif roll_angle < -15
% 如果滚转角小于 -15 度,向右调整
roll_adjustment = 1;
else
% 如果滚转角在 -15 度到 15 度之间,不调整
roll_adjustment = 0;
end
if pitch_angle > 10
% 如果俯仰角大于 10 度,向上调整
pitch_adjustment = 1;
elseif pitch_angle < -10
% 如果俯仰角小于 -10 度,向下调整
pitch_adjustment = -1;
else
% 如果俯仰角在 -10 度到 10 度之间,不调整
pitch_adjustment = 0;
end
if yaw_angle > 5
% 如果偏航角大于 5 度,向左调整
yaw_adjustment = -1;
elseif yaw_angle < -5
% 如果偏航角小于 -5 度,向右调整
yaw_adjustment = 1;
else
% 如果偏航角在 -5 度到 5 度之间,不调整
yaw_adjustment = 0;
end
% 更新姿态
roll_angle = roll_angle + roll_adjustment;
pitch_angle = pitch_angle + pitch_adjustment;
yaw_angle = yaw_angle + yaw_adjustment;
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB条件语句专栏深入探讨了MATLAB条件语句的广泛应用场景,涵盖了从图像处理到机器学习、从数据分析到控制系统等各个领域。专栏文章提供了10个具体应用场景,并针对性能优化、常见陷阱、单元测试和调试技巧等方面提供了详细的指导。此外,专栏还探讨了条件语句在面向对象编程、并行计算、云计算、物联网、金融建模、生物信息学和医学影像等领域的应用。通过这些深入的分析和实用指南,专栏旨在帮助读者充分掌握MATLAB条件语句,提升代码效率、可靠性和可维护性,从而在各种应用场景中发挥其强大功能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
WLC3504配置实战手册:无线安全与网络融合的终极指南

# 摘要
WLC3504无线控制器作为网络管理的核心设备,在保证网络安全、配置网络融合特性以及进行高级网络配置方面扮演着关键角色。本文首先概述了WLC3504无线控制器的基本功能,然后深入探讨了其无线安全配置的策略和高级安全特性,包括加密、认证、访问控制等。接着,文章分析了网络融合功能,解释了无线与有线网络融合的理论与配置方法,并讨论
【802.11协议深度解析】RTL8188EE无线网卡支持的协议细节大揭秘

# 摘要
无线通信技术是现代社会信息传输的重要基础设施,其中802.11协议作为无线局域网的主要技术标准,对于无线通信的发展起到了核心作用。本文从无线通信的基础知识出发,详细介绍了802.11协议的物理层和数据链路层技术细节,包括物理层传输媒介、标准和数据传输机制,以及数据链路层的MAC地址、帧格式、接入控制和安全协议。同时,文章还探讨了RTL8188EE无线网
Allegro 172版DFM规则深入学习:掌握DFA Package spacing的实施步骤
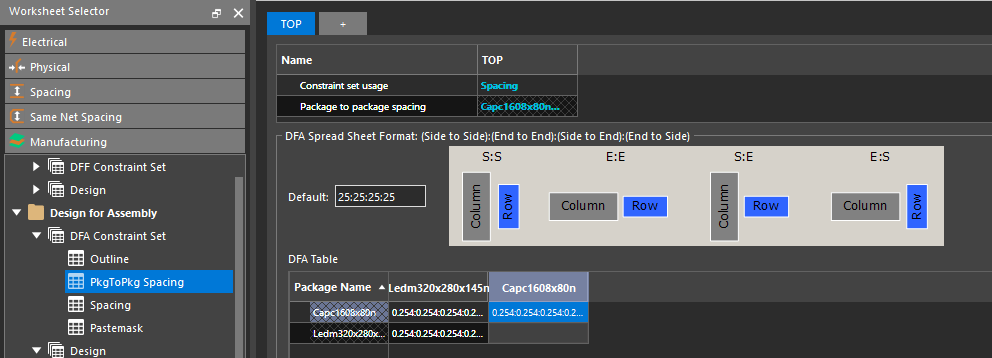
# 摘要
本文围绕Allegro PCB设计与DFM规则,重点介绍了DFA Package Spacing的概念、重要性、行业标准以及在Allegro软件中的实施方法。文章首先定义了DFA Packag
【AUTOSAR TPS深度解析】:掌握TPS在ARXML中的5大应用与技巧

# 摘要
本文系统地介绍了AUTOSAR TPS(测试和验证平台)的基础和进阶应用,尤其侧重于TPS在ARXML(AUTOSAR扩展标记语言)中的使用。首先概述了TPS的基本概念,接着详细探讨了TPS在ARXML中的结构和组成、配置方法、验证与测试
【低频数字频率计设计核心揭秘】:精通工作原理与优化设计要点

# 摘要
数字频率计作为一种精确测量信号频率的仪器,其工作原理涉及硬件设计与软件算法的紧密结合。本文首先概述了数字频率计的工作原理和测量基础理论,随后详细探讨了其硬件设计要点,包括时钟源选择、计数器和分频器的使用、高精度时钟同步技术以及用户界面和通信接口设计。在软件设计与算法优化方面,本文分析了不同的测量算法以
SAP用户管理精进课:批量创建技巧与权限安全的黄金平衡

# 摘要
随着企业信息化程度的加深,有效的SAP用户管理成为确保企业信息安全和运营效率的关键。本文详细阐述了SAP用户管理的各个方面,从批量创建用户的技术和方法,到用户权限分配的艺术,再到权限安全与合规性的要求。此外,还探讨了在云和移动环境下的用户管理高级策略,并通过案例研究来展示理论在实践中的应用。文章旨在为SAP系统管理员提供一套全面的用户管理解决方案,帮助他们优化管理流程,提
【引擎选择秘籍】《弹壳特攻队》挑选最适合你的游戏引擎指南
# 摘要
本文全面分析了游戏引擎的基本概念与分类,并深入探讨了游戏引擎技术核心,包括渲染技术、物理引擎和音效系统等关键技术组件。通过对《弹壳特攻队》游戏引擎实战案例的研究,本文揭示了游戏引擎选择和定制的过程,以及如何针对特定游戏需求进行优化和多平台适配。此外,本文提供了游戏引擎选择的标准与策略,强调了商业条款、功能特性以及对未来技术趋势的考量。通过案例分析,本
【指示灯识别的机器学习方法】:理论与实践结合
# 摘要
本文全面探讨了机器学习在指示灯识别中的应用,涵盖了基础理论、特征工程、机器学习模型及其优化策略。首先介绍了机器学习的基础和指示灯识别的重要性。随后,详细阐述了从图像处理到颜色空间分析的特征提取方法,以及特征选择和降维技术,结合实际案例分析和工具使用,展示了特征工程的实践过程。接着,讨论了传统和深度学习模
【卷积块高效实现】:代码优化与性能提升的秘密武器
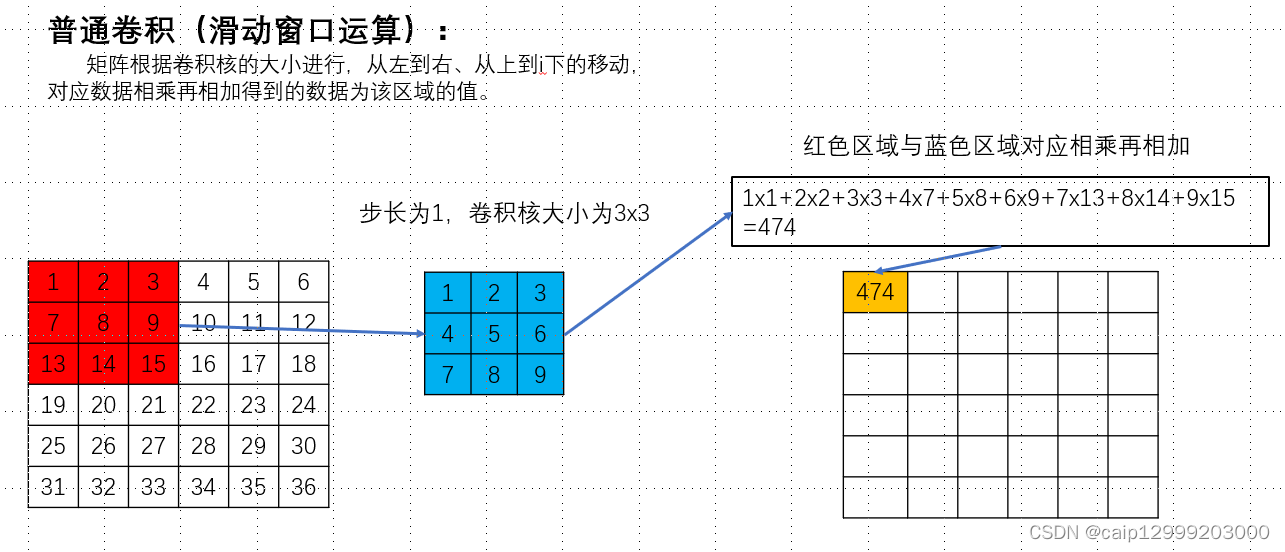
# 摘要
卷积神经网络(CNN)是深度学习领域的重要分支,在图像和视频识别、自然语言处理等方面取得了显著成果。本文从基础知识出发,深入探讨了卷积块的核心原理,包括其结构、数学模型、权重初始化及梯度问题。随后,详细介绍了卷积块的代码实现技巧,包括算法优化、编程框架选择和性能调优。性能测试与分析部分讨论了测试方法和实际应用中性能对比,以及优化策略的评估与选择。最后,展望了卷积块优化的未来趋势,包括新型架构、算法
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )