追踪物体的艺术:Qt+OpenCV摄像头图像跟踪指南
发布时间: 2024-08-10 01:36:50 阅读量: 25 订阅数: 22 
# 1. Qt和OpenCV概述
### 1.1 Qt简介
Qt是一个跨平台的应用程序框架,广泛用于开发图形用户界面(GUI)。它提供了一系列丰富的控件和工具,使开发人员能够轻松创建复杂且美观的应用程序。
### 1.2 OpenCV简介
OpenCV(Open Source Computer Vision Library)是一个开源计算机视觉库,提供了一系列图像处理、计算机视觉和机器学习算法。它广泛用于图像和视频处理、目标检测、跟踪和识别等应用中。
# 2. 摄像头图像获取和处理
### 2.1 Qt中的摄像头访问
#### 2.1.1 QCamera类的使用
QCamera类是Qt中用于访问摄像头设备的类。它提供了对摄像头设备的控制,包括摄像头打开、关闭、图像捕获和摄像头属性设置等功能。
```cpp
// 创建QCamera对象
QCamera camera;
// 打开摄像头
camera.open();
// 设置摄像头分辨率
camera.setResolution(640, 480);
// 设置帧率
camera.setCaptureRate(30);
// 开始图像捕获
camera.start();
```
**参数说明:**
* `setResolution()`:设置摄像头分辨率,参数为宽度和高度。
* `setCaptureRate()`:设置帧率,参数为帧率值。
* `start()`:开始图像捕获。
#### 2.1.2 QVideoFrame类的图像处理
QVideoFrame类表示捕获的视频帧,它提供了对帧数据的访问和处理功能。
```cpp
// 获取当前帧
QVideoFrame frame = camera.currentFrame();
// 转换为OpenCV图像格式
cv::Mat image = cv::Mat(frame.height(), frame.width(), CV_8UC4, frame.bits()).clone();
```
**参数说明:**
* `currentFrame()`:获取当前帧。
* `clone()`:复制帧数据到OpenCV图像中。
### 2.2 OpenCV中的图像处理
#### 2.2.1 图像转换和增强
OpenCV提供了丰富的图像转换和增强功能,包括色彩空间转换、图像滤波、直方图均衡等。
```cpp
// 图像转换:将BGR图像转换为灰度图像
cv::cvtColor(image, grayImage, cv::COLOR_BGR2GRAY);
// 图像滤波:使用高斯滤波器平滑图像
cv::GaussianBlur(grayImage, blurredImage, cv::Size(5, 5), 0);
// 直方图均衡:增强图像对比度
cv::equalizeHist(blurredImage, equalizedImage);
```
**参数说明:**
* `cvtColor()`:图像色彩空间转换,参数为输入图像、输出图像和色彩空间转换类型。
* `GaussianBlur()`:高斯滤波,参数为输入图像、输出图像、内核大小和标准差。
* `equalizeHist()`:直方图均衡,参数为输入图像和输出图像。
#### 2.2.2 特征提取和匹配
OpenCV提供了强大的特征提取和匹配算法,用于图像识别和目标检测等任务。
```cpp
// 特征提取:使用ORB算法提取特征点
cv::Ptr<cv::Feature2D> orb = cv::ORB::create();
std::vector<cv::KeyPoint> keypoints;
cv::Mat descriptors;
orb->detectAndCompute(image, cv::noArray(), keypoints, descriptors);
// 特征匹配:使用BFMatcher进行特征匹配
cv::Ptr<cv::DescriptorMatcher> matcher = cv::DescriptorMatcher::create(cv::DescriptorMatcher::BRUTEFORCE_HAMMING);
std::vector<cv::DMatch> matches;
matcher->match(descriptors1, descriptors2, matches);
```
**参数说明:**
* `ORB::create()`:创建ORB特征提取器。
* `detectAndCompute()`:提取特征点和描述符,参数为输入图像、掩码、输出特征点和输出描述符。
* `DescriptorMatcher::create()`:创建特征匹配器,参数为匹配算法类型。
* `match()`:进行特征匹配,参数为两个描述符和输出匹配结果。
# 3. 目标检测和跟踪
### 3.1 目标检测算法
目标检测算法旨在从图像或视频中识别和定位特定目标。它们通常分为两类:
- **传统算法:**基于手工设计的特征,如 Haar 级联分类器。
- **深度学习模型:**利用神经网络从数据中学习目标特征。
#### 3.1.1

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 Qt 和 OpenCV 为基础,深入探讨了摄像头图像处理的各个方面。从摄像头图像采集和显示的基本原理到图像增强、图像识别、图像分割、图像融合、图像畸变校正、图像压缩、图像传输、图像存储、图像显示优化、图像处理疑难杂症解决、图像处理高级技术、项目实战、算法优化、框架设计和性能分析,本专栏提供了全面的知识体系。通过深入浅出的讲解和丰富的示例代码,本专栏旨在帮助读者掌握摄像头图像处理的核心技术,构建实时摄像头处理系统,并解决图像处理中的常见问题。无论是初学者还是经验丰富的开发者,都可以从本专栏中受益匪浅。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【大数据深层解读】:MapReduce任务启动与数据准备的精确关联

# 1. 大数据处理与MapReduce简介
大数据处理已经成为当今IT行业不可或缺的一部分,而MapRe
MapReduce排序问题全攻略:从问题诊断到解决方法的完整流程
# 1. MapReduce排序问题概述
MapReduce作为大数据处理的重要框架,排序问题是影响其性能的关键因素之一。本章将简要介绍排序在MapReduce中的作用以及常见问题。MapReduce排序机制涉及关键的数据处理阶段,包括Map阶段和Reduce阶段的内部排序过程。理解排序问题的类型和它们如何影响系统性能是优化数据处理流程的重要步骤。通过分析问题的根源,可以更好地设计出有效的解决方案,
【MapReduce性能调优】:垃圾回收策略对map和reducer的深远影响

# 1. MapReduce性能调优简介
MapReduce作为大数据处理的经典模型,在Hadoop生态系统中扮演着关键角色。随着数据量的爆炸性增长,对MapReduce的性能调优显得至关重要。性能调优不仅仅是提高程序运行速度,还包括优化资源利用、减少延迟以及提高系统稳定性。本章节将对MapReduce性能调优的概念进行简要介绍,并逐步深入探讨其
MapReduce MapTask数量对集群负载的影响分析:权威解读
# 1. MapReduce核心概念与集群基础
## 1.1 MapReduce简介
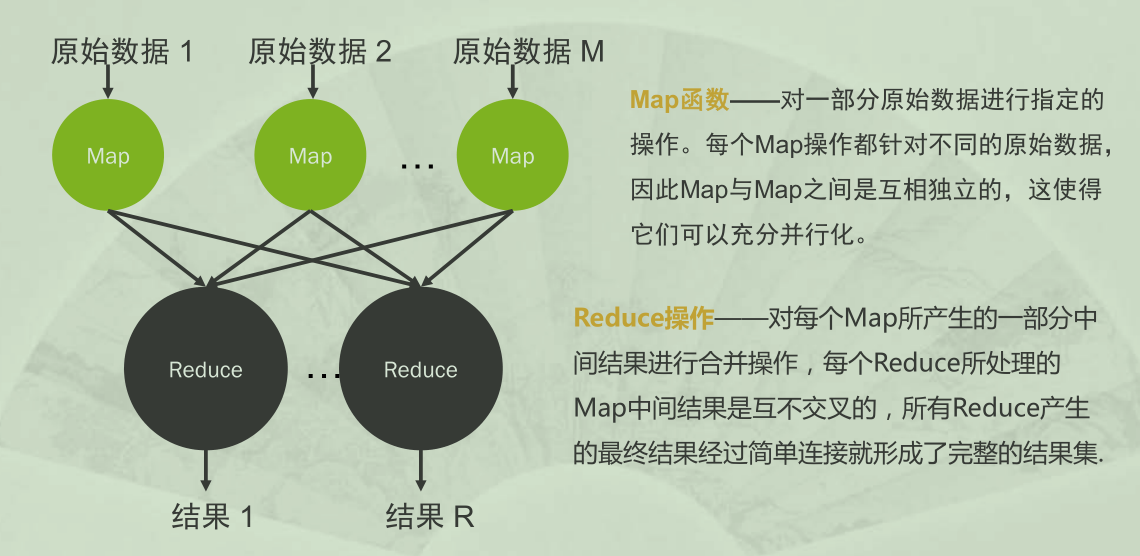
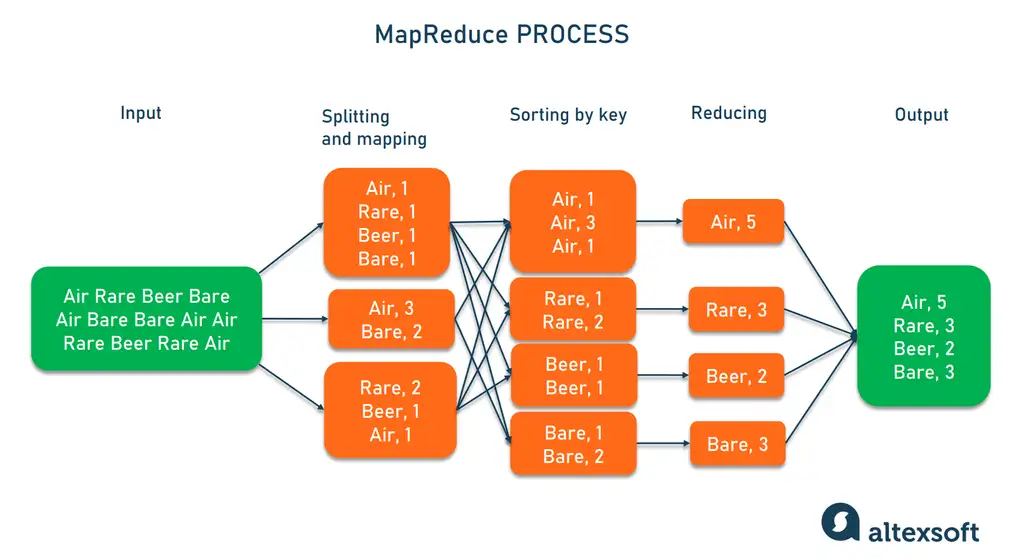
MapReduce是一种编程模型,用于处理大规模数据集的并行运算。它的核心思想在于将复杂的并行计算过程分为两个阶段:Map(映射)和Reduce(归约)。Map阶段处理输入数据,生成中间键值对;Reduce阶段对这些中间数据进行汇总处理。
##
【进阶技巧揭秘】:MapReduce调优实战中的task数目划分与资源均衡

# 1. MapReduce工作原理概述
在大数据处理领域,MapReduce模型是一个被广泛采用的编程模型,用于简化分布式计算过程。它将复杂的数据处理任务分解为两个关键阶段:Map(映射)和Reduce(归约)。Map阶段负责处理输入数据,将其转换成一系列中间键值对;Reduce阶段则对这些中间结果进行汇总处理,生成最终结果。
查询效率低下的秘密武器:Semi Join实战分析

# 1. Semi Join概念解析
Semi Join是关系数据库中一种特殊的连接操作,它在执行过程中只返回左表(或右表)中的行,前提是这些行与右表(或左表)中的某行匹配。与传统的Join操作相比,Semi Jo
【大数据处理的内存管理】:MapReduce内存与中间数据存储策略指南
# 1. 大数据处理的内存管理概述
在大数据处理的舞台上,内存管理是确保应用程序高效运行的关键所在。随着数据量的激增和处理需求的提高,如何合理分配和优化内存资源,已成为IT专业人士关注的焦点。本章将带您概览大数据处理中的内存管理,揭示其对性能提升的直接影响,并为后续章节深入探讨MapReduce内存管理基础、中间数据存储策略及内存与存储的协同优化提供
【Map容量与序列化】:容量大小对Java对象序列化的影响及解决策略
# 1. Java序列化的基础概念
## 1.1 Java序列化的定义
Java序列化是将Java对象转换成字节序列的过程,以便对象可以存储到磁盘或通过网络传输。这种机制广泛应用于远程方法调用(RMI)、对象持久化和缓存等场景。
## 1.2 序列化的重要性
序列化不仅能够保存对象的状态信息,还能在分布式系统中传递对象。理解序列化对于维护Java应用的性能和可扩展性至关重要。
## 1.3 序列化
大数据处理:Reduce Side Join与Bloom Filter的终极对比分析

# 1. 大数据处理中的Reduce Side Join
在大数据生态系统中,数据处理是一项基础且复杂的任务,而 Reduce Side Join 是其中一种关键操作。它主要用于在MapReduce框架中进行大规模数据集的合并处理。本章将介绍 Reduce Side Join 的基本概念、实现方法以及在大数据处理场景中的应用。
数据迁移与转换中的Map Side Join角色:策略分析与应用案例

# 1. 数据迁移与转换基础
## 1.1 数据迁移与转换的定义
数据迁移是将数据从一个系统转移到另一个系统的过程。这可能涉及从旧系统迁移到新系统,或者从一个数据库迁移到另一个数据库。数据迁移的目的是保持数据的完整性和一致性。而数据转换则是在数据迁移过程中,对数据进行必要的格式化、清洗、转换等操作,以适应新环境的需求。
## 1.2 数据迁移
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )