【imgaug背后的算法】:揭秘图像变换数学原理,掌握技术核心
发布时间: 2024-10-05 05:44:01 阅读量: 7 订阅数: 7 
# 1. 图像变换概述
在数字图像处理领域,图像变换是将图像从一种形式转换为另一种形式的过程,以实现特定的分析或处理目的。这些变换可以分为多个层次,从基本的空间域变换到复杂的概率和统计变换,再到以深度学习为基础的高级变换技术。本章我们将对图像变换进行概述,为读者提供一个全面理解图像变换的起点。首先,我们会回顾图像变换的基本概念,然后对整个图像变换技术的发展和应用进行一个鸟瞰式的介绍。这将为后续章节更深入的技术细节讨论奠定坚实的基础。
# 2. 基础图像变换理论
## 2.1 空间域变换
### 2.1.1 平移、旋转和缩放
空间域变换是直接对图像像素值进行操作的技术。在空间域中,图像变换包括平移、旋转和缩放等基础操作。
平移是将图像沿坐标轴进行移动,可以用以下公式表示:
\[
T(x, y) = (x + t_x, y + t_y)
\]
其中,\( (x, y) \) 是原始坐标,\( (t_x, t_y) \) 是平移向量。
旋转通常以图像的中心为原点,按照特定角度进行旋转:
\[
R(x, y, \theta) = \begin{bmatrix}
\cos(\theta) & -\sin(\theta) \\
\sin(\theta) & \cos(\theta)
\end{bmatrix}
\begin{bmatrix}
x \\
y
\end{bmatrix}
\]
缩放操作用于放大或缩小图像,公式如下:
\[
S(x, y) = (s_x \cdot x, s_y \cdot y)
\]
这里,\( (s_x, s_y) \) 是缩放因子。
空间域变换的一个常见应用场景是图像配准。例如,在医学图像分析中,由于患者体位的微小变化,需要将不同时间获取的图像进行配准,以便进行对比分析。
### 2.1.2 仿射变换
仿射变换是一类包括线性变换和位移的二维坐标变换,是最常用的图像变换之一。它可以通过以下变换矩阵实现:
\[
A = \begin{bmatrix}
a_{11} & a_{12} & t_x \\
a_{21} & a_{22} & t_y \\
0 & 0 & 1
\end{bmatrix}
\]
其中,\( a_{11} \) 和 \( a_{22} \) 表示缩放因子,\( a_{12} \) 和 \( a_{21} \) 表示旋转和倾斜因子,\( t_x \) 和 \( t_y \) 表示平移量。
仿射变换允许图像进行非均匀缩放、旋转、倾斜和位移。在实际应用中,使用如OpenCV库中的`warpAffine`函数进行仿射变换:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 定义仿射变换矩阵
affine变换矩阵 = cv2.getRotationMatrix2D((image_width/2, image_height/2), angle, scale)
# 执行仿射变换
transformed_image = cv2.warpAffine(image, affine变换矩阵, (image_width, image_height))
# 显示图像
cv2.imshow('Transformed Image', transformed_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
仿射变换在图像识别和增强现实(AR)中特别重要,能够帮助对不同视角下获取的图像进行对齐。
## 2.2 频域变换
### 2.2.1 傅里叶变换基础
频域变换涉及图像从空间域到频率域的转换,它使得我们能够分析图像的频率分量。傅里叶变换是一种将图像从空间域转换到频率域的方法,是图像处理和信号处理的基础技术之一。
傅里叶变换公式:
\[
F(u, v) = \int_{-\infty}^{\infty}\int_{-\infty}^{\infty} f(x, y)e^{-i2\pi(ux + vy)} dx dy
\]
其中,\( f(x, y) \) 是空间域中的图像,\( F(u, v) \) 是对应的频域表示。
傅里叶变换揭示了图像的频率信息,可以帮助我们识别图像中的周期性结构和边缘信息。例如,在图像增强中,可以去除某些频率分量以突出或抑制特定的图像特征。
### 2.2.2 快速傅里叶变换(FFT)应用
快速傅里叶变换是傅里叶变换的高效算法实现,它可以显著减少变换所需的计算量。FFT在图像处理中的应用包括图像去噪、边缘检测和压缩。
OpenCV中的FFT操作:
```python
import numpy as np
import cv2
# 读取图像并转换为灰度图像
image = cv2.imread('image.jpg', 0)
# 计算图像的FFT
f = np.fft.fft2(image)
fshift = np.fft.fftshift(f)
# 计算幅度谱,并取对数进行显示
magnitude_spectrum = 20 * np.log(np.abs(fshift))
# 显示幅度谱
cv2.imshow('Magnitude Spectrum', magnitude_spectrum)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
FFT的应用场景还包括在数字信号处理中快速计算信号的频率分量,对于实时图像处理系统尤其重要。
## 2.3 概率和统计变换
### 2.3.1 直方图均衡化
直方图均衡化是一种用于增强图像对比度的方法,通过拉伸图像的直方图使图像的亮度分布更加均匀,提高图像的可见度。
直方图均衡化的步骤通常包括计算图像的累积分布函数(CDF),然后将其映射回图像。在OpenCV中,可以使用`cv2.equalizeHist()`函数来实现直方图均衡化。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用直方图均衡化
equalized_image = cv2.equalizeHist(gray_image)
# 显示原始图像和均衡化后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Equalized Image', equalized_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
直方图均衡化在图像增强中特别有用,尤其是对于低对比度的图像,它能有效地改善视觉效果。
### 2.3.2 随机噪声模型
在图像处理中,噪声是不可避免的。随机噪声模型描述了在图像采集和传输过程中产生的随机噪声。常见的噪声类型包括高斯噪声、泊松噪声和椒盐噪声。
了解噪声模型有助于我们选择合适的滤波器进行噪声去除。例如,高斯噪声可以用高斯滤波器进行抑制,而中值滤波器对于去除椒盐噪声非常有效。
```python
# 添加高斯噪声
mean = 0
var = 0.1
sigma = var ** 0.5
noise = np.random.normal(mean, sigma, image.shape)
noisy_image = image + noise
# 应用高斯滤波器去除噪声
gaussian_filtered_image = cv2.GaussianBlur(noisy_image, (5, 5), 0)
# 显示噪声图像和滤波后的图像
cv2.imshow('Noisy Image', noisy_image)
cv2.imshow('Gaussian Filtered Image', gaussian_filtered_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
噪声模型和去噪技术对于提高图像质量至关重要,特别是在要求高精度的医疗和遥感图像处理中。
# 3. 高级图像变换技术
高级图像变换技术是在基础理论之上,通过更加复杂的数学模型和算法,实现对图像的深刻理解和处理。这一章节将深入探讨这些技术,它们广泛应用于计算机视觉、图像分析以及图形处理等领域。
## 3.1 高级几何变换
几何变换是图像处理中重要的一环,它能够改变图像的形状和结构。本节将介绍高级几何变换技术中的投影变换和三维空间变换。
### 3.1.1 投影变换
投影变换用于模拟物体的二维视图,例如将三维世界中的物体投影到一个二维的图像平面上。在计算机图形学和图像处理中,这是一项基础且至关重要的技术。
#### *.*.*.* 基本概念
投影变换涉及将三维空间中的点映射到二维平面,这通常涉及到相机的内外参数。内参描述了相机的光学特性和成像几何,而外参则描述了相机相对于世界坐标系的位置和方向。
#### *.*.*.* 实现步骤
1. **确定相机模型**:选择合适的相机模型,例如针孔相机模型。
2. **计算相机参数**:使用标定技术确定相机内外参数。
3. **点变换**:将三维空间中的点投影到二维平面。
4. **图像校正**:调整图像,消除畸变。
```python
import cv2
import numpy as np
# 假设我们已经通过相机标定获得了相机参数
camera_matrix = ... # 相机内参矩阵
dist_coeffs = ... # 相机畸变系数
# 获取棋盘格角点的3D点
objpoints = np.array([
[0,0,0], [1,0,0], [2,0,0],
[0,1,0], [1,1,0], [2,1,0]
])
# 棋盘格的角点在图像上的位置
imgpoints = np.array([
[100, 50], [300, 50], [500
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 imgaug 库学习专栏!本专栏将带您从入门到精通,掌握 imgaug 的强大功能,打造高效的图像增强流水线。我们将深入探讨 imgaug 的高级技巧,揭秘如何提升图像转换技术,加速机器学习模型性能。此外,您还将了解 imgaug 与深度学习的融合,解锁图像分类的新高度。进阶教程将指导您进行性能优化和内存管理,打造稳定的图像增强系统。我们还将比较 imgaug 与其他图像处理库,帮助您选择最适合您的工具。最后,自动化流程将为您提供一键设置,实现图像增强流水线的自动化。通过本专栏,您将全面掌握 imgaug,提升图像处理效率与质量,为您的机器学习项目注入新的活力。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【高级缓存技巧】

# 1. 缓存技术的原理与重要性
缓存技术是现代计算机系统中的基石,它通过临时存储频繁访问的数据来减少数据访问时间,从而大幅度提升系统性能。这一章将深入探讨缓存技术的基本原理,并阐述其在系统架构中的重要性。
## 1.1 缓存的基本概念与作用
缓存是一种存储技术,它可以将数据存储在处理器或者用户设备附近,以实现快速访问。在数据频繁读取的场景中,
Python正则表达式高级分析:模式识别与数据分析实战指南

# 1. 正则表达式基础概述
正则表达式是一套用于字符串操作的规则和模式,它允许用户通过特定的语法来定义搜索、替换以及验证文本的规则。这使得对数据的提取、分析和处理工作变得简单高效。无论你是进行简单的数据验证还是复杂的文本分析,正则表达式都是不可或缺的工具。
在本章中,我们将带您从零基础开始,了解正则表达式的基本概念、构成及其在数据处理中的重要性。我们将浅入深地介绍正则
【Python时间计算的艺术】:利用time模块进行复杂时间操作的策略
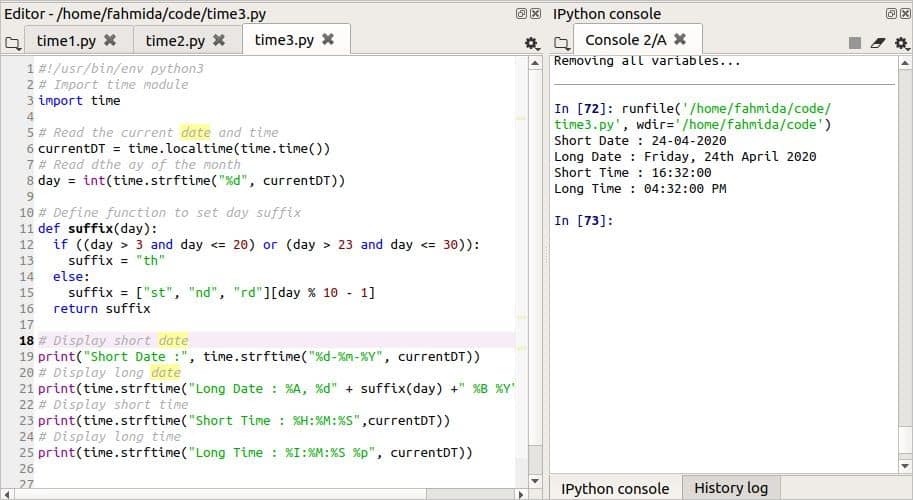
# 1. Python时间计算的基础
在编写代码时,经常需要处理与时间相关的任务,例如记录事件发生的时间戳、格式化日期时间、计算时间差等。Python作为一门功能强大的编程语言,其标准库中包含的time模块为时间计算提供了基本的支持。掌握Python时间计算的基础知识对于编写可靠和高效的代码至关重要。
## 时间的表示方式
在Python中,时间可以用几种不同的方式表示:
- **时间戳*
【os模块与Numpy】:提升数据处理速度,文件读写的优化秘籍

# 1. os模块与Numpy概述
在现代数据科学和软件开发中,对文件系统进行有效管理以及高效地处理和分析数据是至关重要的。Python作为一种广泛使用的编程语言,提供了一系列内置库和工具以实现这些任务。其中,`os`模块和`Numpy`库是两个极其重要的工具,分别用于操作系统级别的文件和目录管理,以及数值计算。
`os`模块提供了丰富的方法和函数,这些方法和函数能够执行各种文件系统操作,比如目录和文件
Twisted Python中的日志记录和监控:实时跟踪应用状态的高效方法

# 1. Twisted Python概述和日志记录基础
## 1.1 Twisted Python简介
Twisted是Python编程语言的一个事件驱动的网络框架。它主要用于编写基于网络的应用程序,支持多种传输层协议。Twisted的优势在
sys模块与Python调试器:系统级调试与错误监控技巧
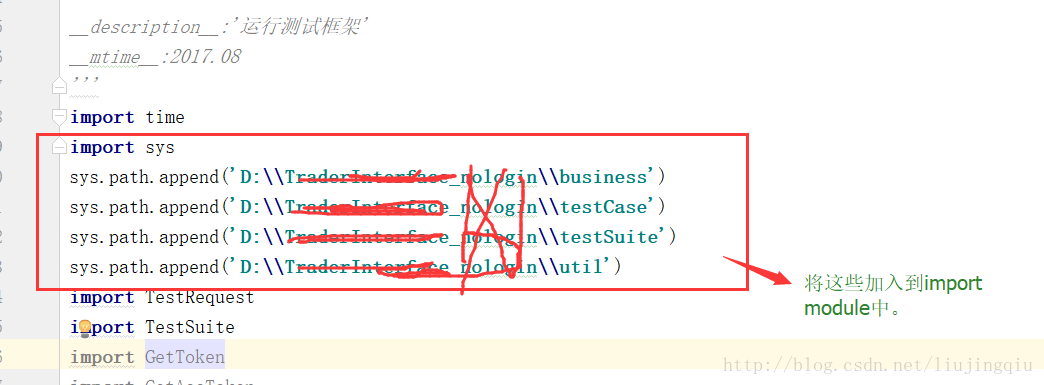
# 1. sys模块概述与应用基础
Python的`sys`模块是一个内置模块,它是与Python解释器紧密联系的一部分。本章将对`sys`模块进行概述,并讨论其在Pyt
事件驱动编程进阶:win32con的【模型】与应用实例

# 1. 事件驱动编程基础与win32con概念
事件驱动编程是一种编程范式,其中程序的流程由事件(如用户输入、传感器信号、消息、定时器事件等)来决定。在Windows平台上,win32con(Windows 32位控制台应用程序)就是基于事件驱动模型,它使用win32 API来处理应用程序的窗口、消息和其他资源。该模型允许开发者创建交互式的桌面应用程序,用户界面响应性强,能以图
【Sphinx SEO优化】:10大策略提升文档搜索引擎排名,吸引更多访问
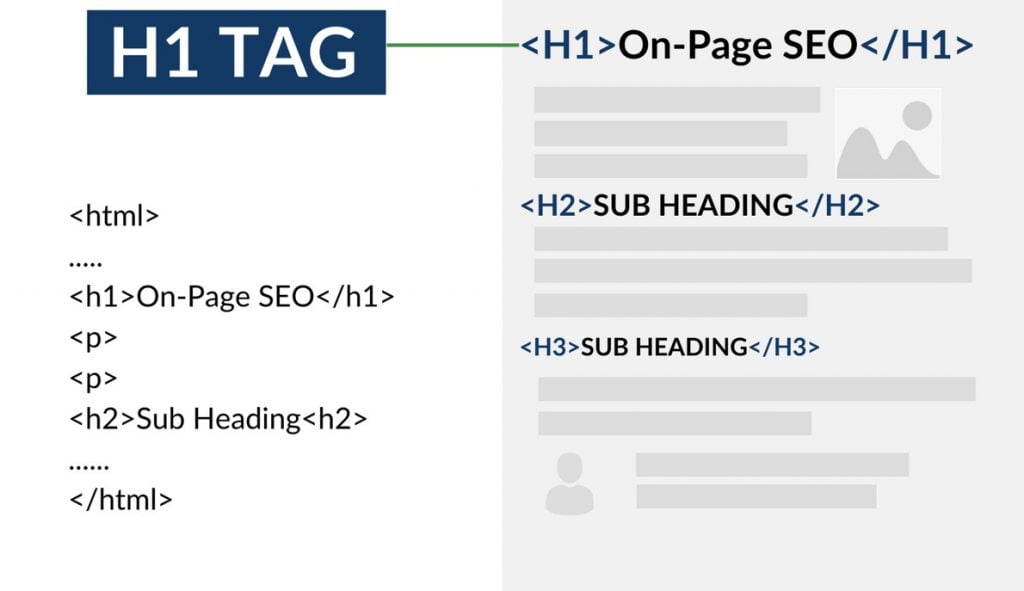
# 1. Sphinx SEO优化概述
Sphinx作为一个高性能的全文搜索服务器,它不仅能够处理和索引大量的数据,而且还能在多个层面与SEO(搜索引擎优化)策略紧密结合。通过有效的优化,可以极大地提升网站在搜索引擎结果页面(SERPs)中的排名和可见性。本章我们将对Sphinx SEO优化的概念进行简单概述,为后
nose.tools测试插件开发:扩展库功能以适应特殊需求的7大步骤
# 1. nose.tools测试插件开发概述
在当今快速发展的IT行业中,软件的质量保证已成为至关重要的一环。其中,单元测试作为保证代码质量的基本手段,扮演着不可或缺的角色。nose.tools作为nose测试框架中用于创建测试工具的模块,为开发者提供了一套强大的工具集。通过使用nose.tools,开发者可以轻
Shutil库:Python中处理文件和目录的同步与异步编程模型

# 1. Shutil库概述
Shutil库是Python标准库中的一个模块,它提供了大量的文件和目录操作的高级接口。这个库以其简洁和易于使用的API而闻名,对于文件复制、移动、重命名等操作,Shutil提供了一套统一的方法,使得开发者可以专注于业务逻辑的实现,而无需深入复杂的文件系统操作细节。Shutil模块的使用非常广泛,它不仅适用于小型脚本,也非常适合在大型项目中进行文
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )