:旋转目标检测YOLO的部署与优化:从本地到云端的实践指南
发布时间: 2024-08-15 22:38:00 阅读量: 36 订阅数: 26 

YOLO目标检测学习指南:从基础到实战的全面解析

# 1. 旋转目标检测YOLO简介**
旋转目标检测YOLO(You Only Look Once)是一种实时目标检测算法,它可以检测图像或视频中旋转的目标。与传统的目标检测算法不同,YOLO可以同时检测目标的位置和方向。
YOLO算法将图像划分为网格,并为每个网格预测一个边界框和一个方向向量。边界框表示目标的位置和大小,而方向向量表示目标的旋转角度。YOLO使用一个单一的卷积神经网络(CNN)来执行这些预测,从而实现了实时检测。
YOLO算法具有以下优点:
* 实时检测:YOLO算法可以在图像或视频中实时检测目标,使其非常适合视频监控、自动驾驶等应用。
* 高精度:YOLO算法的检测精度很高,可以准确地检测目标的位置和方向。
* 鲁棒性:YOLO算法对图像中的旋转、遮挡和光照变化具有鲁棒性,使其在各种条件下都能有效工作。
# 2. YOLO模型部署
### 2.1 本地部署
#### 2.1.1 环境准备
**操作系统:** Ubuntu 16.04 或更高版本
**Python:** 3.6 或更高版本
**PyTorch:** 1.0 或更高版本
**CUDA:** 9.0 或更高版本
**cuDNN:** 7.0 或更高版本
#### 2.1.2 模型下载和配置
**模型下载:**
```bash
wget https://pjreddie.com/media/files/yolov3.weights
```
**配置环境变量:**
```bash
export YOLO_WEIGHTS=yolov3.weights
```
### 2.2 云端部署
#### 2.2.1 云服务选择
| 云服务 | 优势 | 缺点 |
|---|---|---|
| AWS | 强大的计算能力和存储服务 | 价格昂贵 |
| Azure | 广泛的机器学习工具和服务 | 复杂性较高 |
| GCP | 领先的云端AI服务 | 价格较高 |
#### 2.2.2 模型部署流程
**1. 模型转换:** 将 PyTorch 模型转换为云服务支持的格式,如 ONNX 或 TensorRT。
**2. 服务创建:** 在云服务上创建推理服务,并配置模型、输入和输出格式。
**3. 端点部署:** 将推理服务部署到端点,以便客户端可以访问。
**4. 性能监控:** 监控服务性能,并根据需要进行优化。
**代码示例(AWS):**
```python
import boto3
# 创建 SageMaker 客户端
client = boto3.client('sagemaker')
# 创建推理端点
endpoint_name = 'my-yolov3-endpoint'
response = client.create_endpoint(
EndpointName=endpoint_name,
ModelName='my-yolov3-model',
EndpointConfigName='my-yolov3-config'
)
# 等待端点创建完成
waiter = client.get_waiter('endpoint_created')
waiter.wait(EndpointName=endpoint_name)
# 获取端点 URL
endpoint_url = response['EndpointArn'].split(':')[-1]
```
# 3. YOLO模型优化
### 3.1 数据增强
数据增强是提高模型泛化能力的有效手段。通过对训练数据进行各种变换,可以生成更多样化的训练样本,从而使模型能够更好地适应不同的输入数据。
**3.1.1 图像变换**
图像变换包括旋转、缩放、裁剪、翻转等操作。这些变换可以改变图像的几何结构,从而增强模型对不同角度、尺寸和位置目标的识别能力。
```python
import cv2
import numpy as np
# 旋转图像
def rotate_image(image, angle):
image_center = tuple(np.array(image.shape[1::-1]) / 2)
rot_mat = cv2.getRotationMatrix2D(image_center, angle, 1.0)
rotated_image = cv2.warpAffine(image, rot_mat, image.shape[1::-1], flags=cv2.INTER_LINEAR)
return rotated_image
# 缩放图像
def scale_image(image, scale):
scaled_image = cv2.resize(image, (int(image.shape[1] * scale), int(image.shape[0] * scale)))
return scaled_image
# 裁剪图像
def crop_image(image, x, y, width, height):
cropped_image = image[y:y+height, x:x+width]
return cropped_image
# 翻转图像
def flip_image(image,
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《旋转目标检测YOLO》专栏深入探讨了旋转目标检测技术,为读者提供了全面的指南。专栏内容涵盖了从原理到实践的各个方面,包括算法精解、性能优化、实战案例、与传统算法的对比、在不同领域的突破、最新进展、调参秘诀、部署与优化、代码实现、性能评估、训练技巧、常见问题、扩展与应用、开源框架和工具等。专栏旨在帮助读者掌握旋转目标检测技术,并将其应用于实际场景,提升模型性能和解决实际问题的能力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
NModbus性能优化:提升Modbus通信效率的5大技巧
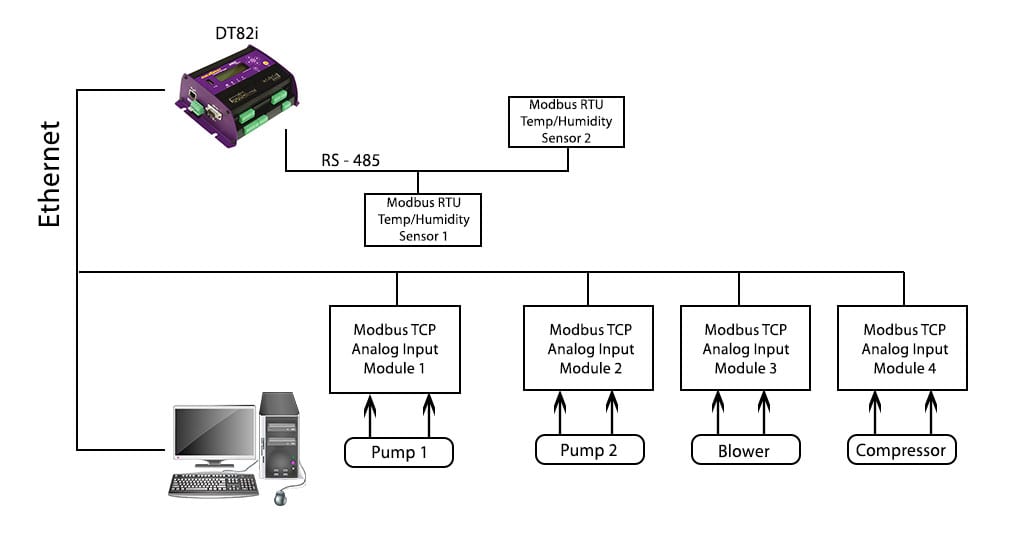
# 摘要
本文综述了NModbus性能优化的各个方面,包括理解Modbus通信协议的历史、发展和工作模式,以及NModbus基础应用与性能瓶颈的分析。文中探讨了性能瓶颈常见原因,如网络延迟、数据处理效率和并发连接管理,并提出了多种优化技巧,如缓存策略、批处理技术和代码层面的性能改进。文章还通过工业自动化系统的案例分析了优化实施过程和结果,包括性能对比和稳定性改进。最后,本文总结了优化经验,展望了NModbus性能优化技术的发展方向。
【Java开发者效率利器】:Eclipse插件安装与配置秘籍

# 摘要
Eclipse插件开发是扩展IDE功能的重要途径,本文对Eclipse插件开发进行了全面概述。首先介绍了插件的基本类型、架构及安装过程,随后详述了提升Java开发效率的实用插件,并探讨了高级配置技巧,如界面自定义、性能优化和安全配置。第五章讲述了开发环境搭建、最佳实践和市场推广策略。最后,文章通过案例研究,分析了成功插件的关键因素,并展望了未来发展趋势和面临的技
【性能测试:基础到实战】:上机练习题,全面提升测试技能
# 摘要
随着软件系统复杂度的增加,性能测试已成为确保软件质量不可或缺的一环。本文从理论基础出发,深入探讨了性能测试工具的使用、定制和调优,强调了实践中的测试环境构建、脚本编写、执行监控以及结果分析的重要性。文章还重点介绍了性能瓶颈分析、性能优化策略以及自动化测试集成的方法,并展望了
SECS-II调试实战:高效问题定位与日志分析技巧

# 摘要
SECS-II协议作为半导体设备通信的关键技术,其基础与应用环境对提升制造自动化与数据交换效率至关重要。本文详细解析了SECS-II消息的类型、格式及交换过程,包括标准与非标准消息的处理、通信流程、流控制和异常消息的识别。接着,文章探讨了SECS-II调试技巧与工具,从调试准备、实时监控、问题定位到日志分析
Redmine数据库升级深度解析:如何安全、高效完成数据迁移

# 摘要
随着信息技术的发展,项目管理工具如Redmine的需求日益增长,其数据库升级成为确保系统性能和安全的关键环节。本文系统地概述了Redmine数据库升级的全过程,包括升级前的准备工作,如数据库评估、选择、数据备份以及风险评估。详细介绍了安全迁移步骤,包括
YOLO8在实时视频监控中的革命性应用:案例研究与实战分析
# 摘要
YOLO8作为一种先进的实时目标检测模型,在视频监控应用中表现出色。本文概述了YOLO8的发展历程和理论基础,重点分析了其算法原理、性能评估,以及如何在实战中部署和优化。通过探讨YOLO8在实时视频监控中的应用案例,本文揭示了它在不同场景下的性能表现和实际应用,同时提出了系统集成方法和优化策略。文章最后展望了YOLO8的未来发展方向,并讨论了其面临的挑战,包括数据隐私和模型泛化能力等问题。本文旨在为研究人员和工程技术人员提供YOLO8
UL1310中文版深入解析:掌握电源设计的黄金法则

# 摘要
电源设计在确保电气设备稳定性和安全性方面发挥着关键作用,而UL1310标准作为重要的行业准则,对于电源设计的质量和安全性提出了具体要求。本文首先介绍了电源设计的基本概念和重要性,然后深入探讨了UL1310标准的理论基础、主要内容以及在电源设计中的应用。通过案例分析,本文展示了UL1310标准在实际电源设计中的实践应用,以及在设计、生产、测试和认证各阶段所面
Lego异常处理与问题解决:自动化测试中的常见问题攻略

# 摘要
本文围绕Lego异常处理与自动化测试进行深入探讨。首先概述了Lego异常处理与问题解决的基本理论和实践,随后详细介绍了自动化测试的基本概念、工具选择、环境搭建、生命周期管理。第三章深入探讨了异常处理的理论基础、捕获与记录方法以及恢复与预防策略。第四章则聚焦于Lego自动化测试中的问题诊断与解决方案,包括测试脚本错误、数据与配置管理,以及性
【Simulink频谱分析:立即入门】

# 摘要
本文系统地介绍了Simulink在频谱分析中的应用,涵盖了从基础原理到高级技术的全面知识体系。首先,介绍了Simulink的基本组件、建模环境以及频谱分析器模块的使用。随后,通过多个实践案例,如声音信号、通信信号和RF信号的频谱分析,展示了Simulink在不同领域的实际应用。此外,文章还深入探讨了频谱分析参数的优化,信号处理工具箱的使用,以及实时频谱分析与数据采
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )