STM32单片机GPIO编程实战:轻松控制输入输出端口
发布时间: 2024-07-01 12:38:59 阅读量: 96 订阅数: 42 

STM32 通用输入输出GPIO流水灯控制.ppt
# 1. STM32单片机GPIO概述
STM32单片机中的通用输入/输出(GPIO)端口是微控制器与外部世界交互的重要接口。GPIO端口允许单片机读取和控制外部设备,例如传感器、执行器和显示器。
GPIO端口由一组引脚组成,每个引脚都可以配置为输入、输出或双向引脚。GPIO引脚可以通过软件进行配置,以设置其模式、电气特性和中断行为。通过配置GPIO端口,单片机可以与各种外部设备进行通信,实现各种功能。
GPIO端口在嵌入式系统中扮演着至关重要的角色,它提供了灵活且可扩展的接口,允许单片机与外部世界交互。
# 2.1 GPIO配置和控制
### 2.1.1 GPIO模式和配置
GPIO模式决定了GPIO引脚的行为方式,STM32单片机提供了多种GPIO模式,包括:
- **输入模式 (GPIO_MODE_INPUT)**:引脚被配置为输入,可以读取外部信号。
- **输出模式 (GPIO_MODE_OUTPUT)**:引脚被配置为输出,可以输出高电平或低电平。
- **推挽输出模式 (GPIO_MODE_OUTPUT_PP)**:引脚被配置为推挽输出,可以输出高电平或低电平,并且具有较强的驱动能力。
- **开漏输出模式 (GPIO_MODE_OUTPUT_OD)**:引脚被配置为开漏输出,只能输出低电平,需要外接上拉电阻才能输出高电平。
- **模拟输入模式 (GPIO_MODE_ANALOG)**:引脚被配置为模拟输入,可以读取外部模拟信号。
GPIO配置通过寄存器进行,主要涉及以下寄存器:
- **GPIOx_MODER**:配置GPIO模式。
- **GPIOx_OTYPER**:配置GPIO输出类型(推挽/开漏)。
- **GPIOx_OSPEEDR**:配置GPIO输出速度。
- **GPIOx_PUPDR**:配置GPIO上拉/下拉电阻。
**代码块:GPIO模式配置**
```c
// 配置GPIOA的第5引脚为输出模式
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
```
**逻辑分析:**
- `GPIO_InitStruct.Pin`:指定要配置的GPIO引脚,此处为GPIOA的第5引脚。
- `GPIO_InitStruct.Mode`:配置GPIO模式为推挽输出模式。
- `GPIO_InitStruct.Pull`:配置GPIO上拉/下拉电阻为无上拉/下拉。
- `HAL_GPIO_Init(GPIOA, &GPIO_InitStruct)`:初始化GPIOA的第5引脚,并应用指定的配置。
### 2.1.2 GPIO读写操作
GPIO读写操作通过寄存器进行,主要涉及以下寄存器:
- **GPIOx_IDR**:读取GPIO输入数据寄存器。
- **GPIOx_ODR**:写入GPIO输出数据寄存器。
**代码块:GPIO读写操作**
```c
// 读取GPIOA的第5引脚的输入状态
uint8_t input_state = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_5);
// 设置GPIOA的第5引脚输出高电平
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
```
**逻辑分析:**
- `HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_5)`:读取GPIOA的第5引脚的输入状态,并将其存储在`input_state`变量中。
- `HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET)`:设置GPIOA的第5引脚输出高电平。
# 3. GPIO应用实例
### 3.1 LED控制
#### 3.1.1 LED连接和配置
**硬件连接:**
* 将LED阳极连接到STM32单片机的GPIO引脚。
* 将LED阴极连接到地线。
* 为LED提供适当的限流电阻。
**GPIO配置:**
* 使用`GPIO_InitTypeDef`结构体配置GPIO引脚为输出模式。
* 设置引脚模式为`GPIO_MODE_OUTPUT_PP`(推挽输出)。
* 设置引脚速度为`GPIO_SPEED_LOW`(低速)。
```c
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_LOW;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
```
#### 3.1.2 LED闪烁程序
**代码逻辑:**
* 无限循环中,依次设置GPIO引脚为高电平(LED亮)和低电平(LED灭)。
* 使用`HAL_Delay()`函数延时一段时间,控制LED闪烁频率。
```c
while (1) {
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_Delay(500);
}
```
### 3.2 按键检测
#### 3.2.1 按键连接和配置
**硬件连接:**
* 将按键的一端连接到STM32单片机的GPIO引脚。
* 将按键的另一端连接到地线。
* 为按键提供上拉电阻。
**GPIO配置:**
* 使用`GPIO_InitTypeDef`结构体配置GPIO引脚为输入模式。
* 设置引脚模式为`GPIO_MODE_INPUT`(输入)。
* 设置引脚拉电为`GPIO_PULLUP`(上拉)。
```c
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
```
#### 3.2.2 按键检测程序
**代码逻辑:**
* 使用`HAL_GPIO_ReadPin()`函数读取GPIO引脚电平。
* 如果引脚电平为低(按键按下),则触发中断或执行其他操作。
```c
while (1) {
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET) {
// 按键按下,执行相关操作
}
}
```
### 3.3 串口通信
#### 3.3.1 串口连接和配置
**硬件连接:**
* 使用UART模块连接STM32单片机和串口设备。
* 将串口设备的TX引脚连接到STM32单片机的RX引脚。
* 将串口设备的RX引脚连接到STM32单片机的TX引脚。
**串口配置:**
* 使用`UART_HandleTypeDef`结构体配置串口模块。
* 设置波特率、数据位、停止位和校验位等参数。
* 初始化串口中断。
```c
UART_HandleTypeDef huart1;
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
HAL_UART_Init(&huart1);
```
#### 3.3.2 串口通信程序
**代码逻辑:**
* 使用`HAL_UART_Transmit()`函数发送数据。
* 使用`HAL_UART_Receive()`函数接收数据。
* 使用中断处理串口接收和发送事件。
```c
while (1) {
// 发送数据
HAL_UART_Transmit(&huart1, (uint8_t *)"Hello World!", strlen("Hello World!"));
// 接收数据
uint8_t rx_data[100];
HAL_UART_Receive(&huart1, rx_data, 100, 1000);
}
```
# 4. GPIO高级应用
### 4.1 GPIO多路复用
#### 4.1.1 GPIO多路复用配置
GPIO多路复用允许单个GPIO引脚连接到多个外设。这可以通过配置引脚的复用功能寄存器(AFR)来实现。AFR寄存器允许将引脚分配给不同的功能,例如GPIO、定时器、ADC等。
```c
// 配置GPIOA引脚0为复用功能,连接到定时器2通道1
RCC->APB2ENR |= RCC_APB2ENR_TIM2EN; // 使能定时器2时钟
GPIOA->AFR[0] |= GPIO_AFRL_AFRL0_TIM2_2; // 将PA0引脚分配给定时器2通道1
```
#### 4.1.2 GPIO多路复用应用
GPIO多路复用在以下应用中非常有用:
- **资源共享:**允许多个外设共享同一GPIO引脚,从而节省资源。
- **灵活配置:**允许在运行时动态重新配置GPIO引脚的功能,提高系统的灵活性。
- **增强功能:**通过连接到不同的外设,可以扩展GPIO引脚的功能,例如将GPIO引脚用作模拟输入或输出。
### 4.2 GPIO模拟输入/输出
#### 4.2.1 GPIO模拟输入配置
某些STM32单片机支持将GPIO引脚配置为模拟输入引脚。这允许单片机读取外部模拟信号。模拟输入配置涉及以下步骤:
1. **使能ADC时钟:**ADC时钟必须在使用模拟输入之前使能。
2. **配置GPIO引脚:**GPIO引脚必须配置为模拟输入模式。
3. **配置ADC通道:**ADC通道必须配置为与所选GPIO引脚相关联。
```c
// 配置PA0引脚为模拟输入,连接到ADC通道1
RCC->APB2ENR |= RCC_APB2ENR_ADC1EN; // 使能ADC1时钟
GPIOA->MODER |= GPIO_MODER_MODER0_1; // 将PA0引脚配置为模拟输入模式
ADC1->CR2 |= ADC_CR2_ADON; // 使能ADC1
ADC1->SQR1 |= ADC_SQR1_L_0; // 将通道1分配给PA0引脚
```
#### 4.2.2 GPIO模拟输出配置
某些STM32单片机还支持将GPIO引脚配置为模拟输出引脚。这允许单片机输出模拟信号。模拟输出配置涉及以下步骤:
1. **使能DAC时钟:**DAC时钟必须在使用模拟输出之前使能。
2. **配置GPIO引脚:**GPIO引脚必须配置为模拟输出模式。
3. **配置DAC通道:**DAC通道必须配置为与所选GPIO引脚相关联。
```c
// 配置PA4引脚为模拟输出,连接到DAC通道1
RCC->APB1ENR |= RCC_APB1ENR_DACEN; // 使能DAC时钟
GPIOA->MODER |= GPIO_MODER_MODER4_1; // 将PA4引脚配置为模拟输出模式
DAC->CR |= DAC_CR_EN1; // 使能DAC通道1
DAC->DHR12R1 = 0x0FFF; // 设置DAC输出电压为最大值
```
# 5.1 GPIO常见问题及解决方法
在使用GPIO的过程中,可能会遇到一些常见问题,下面列出一些常见问题及其解决方法:
### 5.1.1 GPIO配置错误
**问题:** GPIO配置错误,导致无法正常工作。
**解决方法:**
- 检查GPIO引脚是否正确连接到外围设备。
- 确保GPIO模式和配置正确。
- 检查GPIO时钟是否使能。
- 使用示波器或逻辑分析仪检查GPIO引脚上的信号是否正确。
### 5.1.2 GPIO中断失效
**问题:** GPIO中断失效,无法触发中断服务函数。
**解决方法:**
- 检查GPIO中断是否正确配置,包括中断触发方式、中断优先级等。
- 确保中断服务函数编写正确,并且没有语法错误。
- 使用调试器或printf语句检查中断服务函数是否被正确调用。
- 检查中断标志寄存器是否被正确清除。
**代码示例:**
```c
// 中断服务函数
void EXTI0_IRQHandler(void)
{
// 检查中断标志位
if (EXTI->PR & EXTI_PR_PR0) {
// 清除中断标志位
EXTI->PR |= EXTI_PR_PR0;
// 执行中断处理逻辑
// ...
}
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《STM32单片机最小系统》专栏是一份全面的指南,旨在帮助您构建和掌握基于STM32单片机的嵌入式系统。从入门指南到高级主题,本专栏涵盖了广泛的主题,包括时钟配置、GPIO编程、定时器应用、串口通信、中断处理、ADC采样、DAC输出、PWM调制、总线通信(CAN、I2C、SPI)、DMA传输、RTOS编程、FreeRTOS实战、嵌入式Linux移植、驱动开发、固件更新、调试技巧和性能优化。通过深入剖析和实战示例,本专栏将为您提供构建可靠、高效和可扩展的嵌入式系统的知识和技能。无论您是嵌入式系统的新手还是经验丰富的开发人员,本专栏都将成为您不可或缺的资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
QPSK调制解调信号处理艺术:数学模型与算法的实战应用
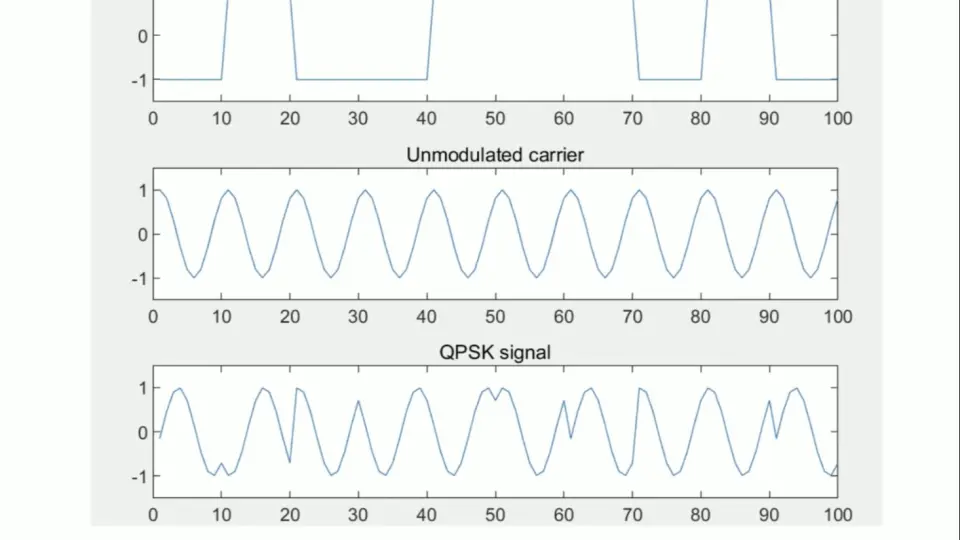
# 摘要
本文系统地探讨了QPSK(Quadrature Phase Shift Keying)调制解调技术的基础理论、实现算法、设计开发以及在现代通信中的应用。首先介绍了QPSK调制解调的基本原理和数学模型,包括信号的符号表示、星座图分析以及在信号处理中的应用。随后,深入分析了QPSK调制解调算法的编程实现步骤和性能评估,探讨了算法优化与
Chan氏算法之信号处理核心:揭秘其在各领域的适用性及优化策略

# 摘要
Chan氏算法作为信号处理领域的先进技术,其在通信、医疗成像、地震数据处理等多个领域展现了其独特的应用价值和潜力。本文首先概述了Cha
全面安防管理解决方案:中控标软件与第三方系统的无缝集成

# 摘要
随着技术的进步,安防管理系统集成已成为构建现代化安全解决方案的重要组成部分。本文首先概述了安防管理系统集成的概念与技术架构,强调了中控标软件在集成中的核心作用及其扩展性。其次,详细探讨了与门禁控制、视频监控和报警系统的第三方系统集成实践。在集成过程中遇到的挑战,如数据安全、系统兼容性问题以及故障排除等,并提出相应的对策。最后,展望了安防集成的未来趋势,包括人工智能、物联网技术
电力系统继电保护设计黄金法则:ETAP仿真技术深度剖析
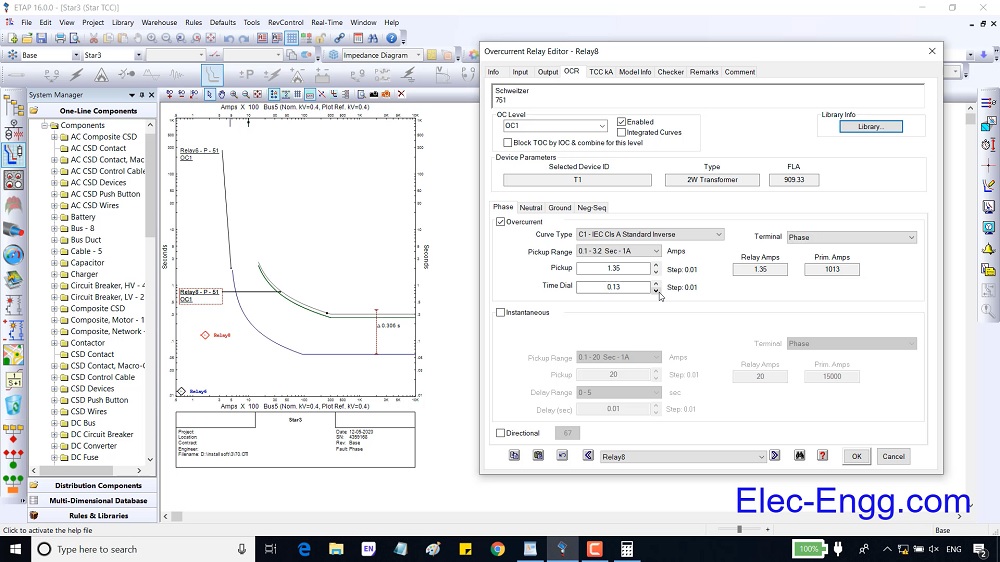
# 摘要
本文对电力系统继电保护进行了全面概述,详细介绍了ETAP仿真软件在继电保护设计中的基础应用与高级功能。文章首先阐述了继电保护的基本理论、设计要求及其关键参数计算,随后深入探讨了ETAP在创建电力系统模型、故障分析、保护方案配置与优化方面的应用。文章还分析了智能化技术、新能源并网对继电保护设计的影响,并展望了数字化转型下的新挑战。通过实际案例分析
进阶技巧揭秘:新代数控数据采集优化API性能与数据准确性

# 摘要
数控数据采集作为智能制造的核心环节,对提高生产效率和质量控制至关重要。本文首先探讨了数控数据采集的必要性与面临的挑战,并详细阐述了设计高效数据采集API的理论基础,包括API设计原则、数据采集流程模型及安全性设计。在实践方面,本文分析了性能监控、数据清洗预处理以及实时数据采集的优化方法。同时,为提升数据准确性,探讨了数据校验机制、数据一致性
从零开始学FANUC外部轴编程:基础到实战,一步到位

# 摘要
本文旨在全面介绍FANUC外部轴编程的核心概念、理论基础、实践操作、高级应用及其在自动化生产线中的集成。通过系统地探讨FANUC数控系统的特点、外部轴的角色以及编程基础知识,本文提供了对外部轴编程技术的深入理解。同时,本文通过实际案例,演示了基本与复杂的外部轴编程技巧,并提出了调试与故障排除的有效方法。文章进一步探讨了外部轴与工业机器人集成的高级功能,以及在生产线自动化
GH Bladed 高效模拟技巧:中级到高级的快速进阶之道

# 摘要
GH Bladed是一款专业的风力发电设计和模拟软件,广泛应用于风能领域。本文首先介绍了GH Bladed的基本概念和基础模拟技巧,涵盖软件界面、参数设置及模拟流程。随后,文章详细探讨了高级模拟技巧,包括参数优化和复杂模型处理,并通过具体案例分析展示了软件在实际项目中的应
【跨平台驱动开发挑战】:rockusb.inf在不同操作系统的适应性分析

# 摘要
本文旨在深入探讨跨平台驱动开发领域,特别是rockusb.inf驱动在不同操作系统环境中的适配性和性能优化。首先,对跨平台驱动开发的概念进行概述,进而详细介绍rockusb.inf驱动的核心功能及其在不同系统中的基础兼容性。随后,分别针对Windows、Linux和macOS操作系统下rockusb.inf驱动的适配问题进行了深入分
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )