嵌入式系统双线CAN通信实战:GMW3122规范下的实现技巧
发布时间: 2024-12-14 14:56:23 阅读量: 4 订阅数: 9 

GMW_3122_2005.rar_Freescale_GM CAN_GMLAN_GMW 3122_GMW3122
参考资源链接:[GMW3122: 双线CAN物理层与数据链路层规范](https://wenku.csdn.net/doc/6412b675be7fbd1778d46cc0?spm=1055.2635.3001.10343)
# 1. 嵌入式系统中双线CAN通信概述
## 1.1 双线CAN通信简介
双线CAN通信是一种多主模式的串行通信协议,广泛应用于嵌入式系统中,特别是在汽车电子领域。该技术由德国Bosch公司首次提出并标准化,它的设计初衷是为了满足汽车内部各控制单元间高速、高可靠性的数据交换需求。双线CAN通信相较于单线CAN,通过两条物理线路传输数据,进一步提高了通信的稳定性和容错能力。
## 1.2 双线CAN通信的优势
双线CAN通信技术的主要优势在于其出色的错误检测和管理能力,以及在高噪声环境下对数据传输的加强保护。它采用了差分信号传输方式,一条线路传输数据,另一条线路传输数据的反相信号,从而增强了信号的抗干扰性能。在汽车电子控制系统中,这种通信方式可以减少通信错误,保障行车安全。
## 1.3 双线CAN通信的应用
在嵌入式系统,尤其是汽车电子领域中,双线CAN通信的应用极为广泛。例如,在发动机控制、车身控制、安全系统以及信息系统中,双线CAN通信都能够提供高速且可靠的通信连接,帮助实现车辆的稳定运行和安全监控。随着汽车工业的发展,这种通信技术也在不断进化,以满足更为复杂和苛刻的应用场景。
双线CAN通信技术的有效实施,不仅依赖于对硬件的选择和设计,更需要一个强大的软件支持系统。在后续章节中,我们将详细介绍如何基于GMW3122规范实现高效的双线CAN通信系统设计,以及实战中的调试、测试和优化策略。
# 2. GMW3122规范理解与实现基础
## 2.1 GMW3122规范概述
### 2.1.1 规范的历史背景与发展
GMW3122规范由通用汽车公司制定,主要用于定义车载网络通信协议,特别是在汽车电子控制单元(ECU)之间进行数据交换的双线CAN通信网络。此规范的历史背景与汽车工业发展息息相关,随着汽车电子设备的日益增多,需要更加可靠、高效的通信协议来保证不同模块之间的数据交互。
随着技术的发展,GMW3122规范也在不断地进行迭代更新。从最初的版本1.0,到后来的版本2.0,规范对数据传输的速率、数据帧的格式、错误处理机制等方面做了更为严格和详细的规定,以适应现代汽车工业对通信网络提出的更高要求。
### 2.1.2 规范的结构和主要要求
GMW3122规范的结构主要分为以下几个部分:
- **数据链路层:** 这一层定义了如何在双线CAN总线上物理传输数据,包括数据帧的格式、帧标识符的分配、错误检测和处理等。
- **物理层:** 规定了网络电气特性,包括信号的电气级别、传输速率、总线的物理接口和电缆特性等。
- **网络管理:** 包括了网络的初始化、配置、网络监控和故障诊断等功能的要求。
GMW3122的主要要求包括:
- **可靠性:** 要求通信系统能够在各种极端条件下可靠地工作,包括高速运行、强电磁干扰等环境。
- **实时性:** 数据传输必须满足实时性要求,确保关键信息的快速传输。
- **兼容性:** 与其他汽车通信标准的兼容性,比如满足OBD-II标准等。
## 2.2 双线CAN通信技术基础
### 2.2.1 CAN协议的特点和层次结构
控制器局域网络(CAN)协议是一种被广泛应用于嵌入式系统的通信协议,尤其是在汽车工业中。CAN协议具有以下特点:
- **多主通信:** 多个控制单元可以在同一总线上同时通信,网络中没有主从之分。
- **非破坏性仲裁:** 通过标识符来解决网络冲突,保证高优先级的消息优先传输。
- **错误检测:** 集成了先进的错误检测和处理机制,包括循环冗余校验(CRC)等。
- **实时性强:** 采用消息优先级和非破坏性仲裁机制,保证关键数据及时传输。
CAN协议的层次结构主要包括:
- **应用层:** 提供用户接口和应用相关的功能。
- **数据链路层:** 负责数据的封装、传输和错误检测。
- **物理层:** 负责电信号的传输和接收。
### 2.2.2 双线CAN与单线CAN的区别与优势
双线CAN和单线CAN主要的区别在于总线的物理结构和冗余设计。单线CAN使用两条线(CAN-H和CAN-L)进行通信,而双线CAN使用三条线(CAN-H、CAN-L和CAN-S),其中第三条线是地线或信号地线,用以提供额外的电气稳定性和增强抗干扰能力。
双线CAN的优势主要表现在:
- **更高的可靠性:** 在极端条件下,例如引擎附近高电压或强干扰环境,双线CAN通信更加稳定可靠。
- **更好的抗干扰能力:** 通过第三条线的引入,有效提高了信号的抗干扰能力,特别是在电磁复杂的环境下。
- **冗余性:** 双线设计为系统的安全提供了更多的冗余选择,提高了系统的整体安全性能。
## 2.3 双线CAN通信硬件需求
### 2.3.1 CAN控制器和收发器的选择
在双线CAN通信硬件设计中,选择合适的CAN控制器和收发器是至关重要的。控制器需要具有支持双线CAN通信协议的能力,而收发器则需要能够处理双线CAN的特定物理信号要求。
**CAN控制器选择参考:**
- **符合标准:** 支持GMW3122规范中定义的数据链路层和应用层协议。
- **高集成度:** 高集成度的控制器减少了外部组件数量,简化了设计复杂度。
- **软件可配置:** 能够通过软件设置CAN的各个参数,如波特率、过滤器等。
**CAN收发器选择参考:**
- **高共模抑制比:** 在强干扰环境中,需要有优秀的共模抑制能力。
- **低功耗设计:** 适用于车载系统,降低能耗。
- **符合EMC要求:** 符合汽车电子的电磁兼容性要求,减少对其他电子设备的干扰。
### 2.3.2 硬件接口设计和电磁兼容性考虑
硬件接口设计是保证双线CAN通信稳定性的基础,电磁兼容性(EMC)设计则是保障系统可靠运行的关键。
**硬件接口设计要求:**
- **阻抗匹配:** 在总线中使用合适的阻抗匹配,避免信号反射。
- **终端电阻:** 在总线的两端加入适当的终端电阻,以减少信号反射和振铃。
**电磁兼容性设计要求:**
- **隔离措施:** 对敏感电路采用隔离措施,比如光耦或磁隔离,以提高抗干扰能力。
- **滤波和保护:** 对所有信号线进行滤波处理,避免高频干扰,同时对电路进行保护,如使用TVS管进行过压保护。
这些硬件设计措施对于提高双线CAN通信的稳定性和可靠性具有重要意义。
# 3. 基于GMW3122的双线CAN通信软件设计
在嵌入式系统中,双线CAN通信的应用不仅限于数据的传输,更是智能化与网络化的关键要素。双线CAN通信技术允许在同一个总线上同时传输数据和控制命令,为嵌入式系统提供了高效和灵活的通信手段。本章将深入探讨如何在GMW3122规范的指导下,设计出稳定、高效、可扩展的双线CAN通信软件。
## 3.1 软件架构和设计模式
### 3.1.1 分层架构的重要性
分层架构是软件设计中的一种常见模式,旨在将复杂系统分解为更小、更易于管理的部分。在双线CAN通信软件设计中,分层架构可以帮助我们清晰地分离不同功能模块,从而简化开发流程,提高软件的可维护性。
在GMW3122规范的指导下,双线CAN通信软件通常分为以下几层:
- **硬件抽象层(HAL)**:直接与硬件打交道,负责初始化硬件资源和提供硬件访问接口。
- **数据链路层**:处理数据帧的封装与解析,确保数据在总线上正确传输。
- **网络层**:管理CAN消息的发送和接收,提供消息路由和过滤功能。
- **应用层**:处理具体业务逻辑,如传感器数据的收集、处理和执行控制命令。
### 3.1.2 设计模式在通信设计中的应用
设计模式是面向对象设计中解决特定问题的通用模板。在双线CAN通信软件设计中,合理应用设计模式可以增强系统的可扩展性、灵活性和可维护性。
常见的设计模式有:
- **观察者模式**:用于事件驱动的通信,当数据发生变化时,相应的观察者会被通知。
- **工厂模式**:用于创建不同类型的CAN消息对象,实现对象的生成与管理。
- **策略模式**:用于定义不同算法族,允许在运行时选择不同的算法实现。
- **单例模式**:确保一个类只有一个实例,并提供全局访问点。
采用这些设计模式可以使得软件结构更加模块化,使得不同层次之间的耦合度降低,便于功能的扩展和维护。
## 3.2 消息处理与数据封装
### 3.2.1 消息帧格式和数据封装方法
在双线CAN通信中,消息通常以帧的形式进行传输。GMW3122规范定义了消息帧的格式和结构,包含标准帧和扩展帧两种格式。消息帧主要包括标识符(ID)、数据长度码(DLC)、数据字段和校验字段。
在软件设计中,开发者需要根据这些标准定义消息封装和解析的逻辑:
```c
typedef struct {
uint32_t id; // 消息ID
uint8_t length; // 数据长度
uint8_t data[8]; // 数据字段,最多8字节
uint16_t crc; // CRC校验码
} CAN_Message;
```
消息封装的过程通常包括:
1. 根据消息类型,生成相应的帧格式。
2. 将要传输的数据打包到数据字段中。
3. 按照CAN协议规则计算出校验码。
4. 构建最终的CAN帧并发送。
### 3.2.2 实时性和同步机制的实现
在双线CAN通信系统中,实时性是关键的性能指标之一。为了确保数据传输的实时性,软件中必须实现有效的同步机制。
实现同步的一种方法是使用时间戳:
```c
void sendCANMessage(CAN_Message *msg, uint32_t timestamp) {
// 使用时间戳和消息ID进行优先级排序等
// 发送消息到CAN总线
...
}
```
在接收端,软件应根据时间戳来处理消息,确保数据按照发送顺序被处理。如果消息的时间戳显示延迟,软件应能触发重传机制,确保数据的及时性和同步性。
## 3.3 错误处理与诊断机制
### 3.3.1 CAN通信中常见的错误类型
在双线CAN通信过程中,可能会遇到多种错误类型,这些错误可以分为三种基本类型:
- **通信错误**:由于硬件故障或网络拥塞导致的消息传输失败。
- **格式错误**:数据帧格式不正确,如ID设置错误或长度码不匹配。
- **应用层错误**:业务逻辑处理中的错误,比如错误的命令解析。
### 3.3.2 错误检测与处理策略
为了维护通信的可靠性,软件必须具备错误检测和处理的能力。这通常包括周期性的状态检查和异常处理流程。
在硬件层面上,常见的错误检测方法包括:
```c
void checkCANStatus() {
CAN_Status_t status = CAN_GetStatus();
if (status.error) {
// 处理硬件错误
handleHardwareError();
}
...
}
```
在软件层面,可以通过定时任务检查消息的到达和完整性:
```c
void checkMessageIntegrity() {
for (int i = 0; i < NUM_MESSAGES; i++) {
CAN_Message *msg = getMessage(i);
if (!isValidCRC(msg)) {
// 处理数据完整性错误
handleDataIntegrityError(msg);
}
}
...
}
```
### 3.3.3 诊断功能的设计与实现
在双线CAN通信中,诊断功能对于系统的维护和故障排除至关重要。诊断机制通常包括错误记录、故障指示和自我修复功能。
例如,软件可以实现一个错误记录模块:
```c
void recordError(CAN_Message *msg, ErrorType errorType) {
// 记录错误类型和消息内容
...
}
```
通过这些记录,软件可以提供详细的错误报告,帮助工程师快速定位和解决问题。此外,一些诊断命令允许远程访问设备,实现对系统的在线监控和维护。
以上内容是针对第三章“基于GMW3122的双线CAN通信软件设计”的部分内容。在接下来的讨论中,将涉及更为深入的技术细节和实现要点,为实现高性能的双线CAN通信软件提供技术指导。
# 4. 嵌入式系统中双线CAN通信的实战技巧
## 4.1 初始化和配置的实践
### 4.1.1 CAN控制器初始化流程
在嵌入式系统中,双线CAN通信的初始化是确保通信正常运作的关键一步。初始化流程主要包括硬件初始化、软件初始化和通信参数设置三个主要部分。
#### 硬件初始化
首先需要对CAN控制器和收发器进行硬件层面的初始化。这包括配置控制器的引脚电平、时钟源以及相关的电源管理模块。此外,还需检查物理连接是否正确,确认收发器的终端电阻匹配,以避免反射和信号干扰。
```c
// 示例代码:CAN控制器硬件初始化
void CAN_Controller_Init() {
// 初始化GPIO引脚,连接CAN控制器
// 配置CAN控制器的引脚电平和时钟源
// 检查并设置终端电阻值
...
}
```
#### 软件初始化
软件初始化涉及设置通信参数,如波特率、采样点、同步跳跃宽度等。在GMW3122规范中,对于双线CAN通信,还特别需要配置特定的规范参数,如报文格式、过滤器设置以及识别码等。
```c
// 示例代码:CAN控制器软件初始化
void CAN_Software_Init() {
// 设置CAN控制器的通信参数
// 配置波特率和同步跳跃宽度
// 配置报文格式和过滤器设置
...
}
```
#### 通信参数设置
在双线CAN通信中,通信参数的正确配置是至关重要的。错误的参数设置会导致通信不稳定或完全失败。在初始化阶段,应确保所有参数都与GMW3122规范一致,并符合特定应用的要求。
```c
// 示例代码:设置通信参数
void CAN_ConfigParams(uint32_t baudrate, uint8_t sjw, uint8_t phase1, uint8_t phase2) {
// 设置波特率
// 设置采样点和同步跳跃宽度
// 设置报文格式和过滤器参数
...
}
```
### 4.1.2 高级特性设置和优化
双线CAN控制器除了基本的初始化设置外,还支持一些高级特性,如时间触发通信(TTCAN)、自动离线处理和远程帧接收等。合理地利用这些特性,可以进一步提升通信系统的性能和可靠性。
```c
// 示例代码:高级特性设置
void CAN_AdvancedFeatures_Config() {
// 启用TTCAN模式
// 配置自动离线处理
// 设置远程帧接收
...
}
```
在进行高级特性设置时,需要根据实际应用的具体要求来选择合适的配置选项。对于时间触发通信模式(TTCAN),则需要特别注意时间基准的设定和同步机制,确保通信的时序准确性。
## 4.2 数据传输效率提升策略
### 4.2.1 缓冲管理和消息队列优化
在嵌入式系统中,为了确保高效率的数据传输,需要对缓冲区进行有效管理,并优化消息队列。缓冲管理包括使用环形缓冲区(Ring Buffer)来减少内存分配和释放的开销,而消息队列的优化则涉及优先级队列,确保关键数据可以优先传输。
#### 环形缓冲区的实现
环形缓冲区是一种高效的内存管理方案,适合于数据流的读写操作。其核心思想是将缓冲区看作一个环形,读写指针从缓冲区的两端分别移动,当任一指针到达缓冲区边界时,它会“环绕”回到缓冲区的另一端。
```c
// 示例代码:环形缓冲区实现
#define BUFFER_SIZE 1024
uint8_t ring_buffer[BUFFER_SIZE];
size_t read_index = 0;
size_t write_index = 0;
void RingBuffer_Push(uint8_t data) {
ring_buffer[write_index] = data;
write_index = (write_index + 1) % BUFFER_SIZE;
}
uint8_t RingBuffer_Pop() {
uint8_t data = ring_buffer[read_index];
read_index = (read_index + 1) % BUFFER_SIZE;
return data;
}
```
#### 优先级队列的实现
在消息队列中引入优先级的概念,允许系统在处理多条消息时,优先考虑高优先级的数据。这样可以确保关键信息能够在发生拥堵时得到优先处理。
```c
// 示例代码:优先级队列实现
typedef struct Message {
uint8_t priority; // 消息优先级
uint8_t data[]; // 消息数据
} Message;
typedef struct PriorityQueue {
Message* queue[];
size_t count;
} PriorityQueue;
void PriorityQueue_Push(PriorityQueue* pq, Message msg) {
// 根据优先级将消息插入队列
}
Message PriorityQueue_Pop(PriorityQueue* pq) {
// 移除并返回优先级最高的消息
}
```
### 4.2.2 传输优先级和中断管理
在双线CAN通信中,设置正确的传输优先级对于保证数据传输效率至关重要。优先级管理需要在系统设计时就规划好,优先级的设置应考虑到数据的紧急性以及对实时性的要求。
#### 中断管理
中断管理是提升数据传输效率的另一个关键因素。通过合理配置和管理中断,可以减少CPU的轮询负担,及时响应外部事件。在嵌入式系统中,中断通常用于接收数据帧、检测错误和处理通信状态变化。
```c
// 示例代码:中断管理伪代码
void CAN_Interrupt_Init() {
// 配置接收中断
// 配置错误检测中断
// 配置状态变化中断
}
void CAN_Interrupt_Handler() {
// 接收数据处理
// 错误检测处理
// 状态变化处理
}
```
在中断管理中,还需要注意优先级的设置,特别是与其他中断源共存时,合理安排中断优先级可以避免竞争和延迟,保证系统响应的及时性。
## 4.3 实际应用案例分析
### 4.3.1 案例背景与技术选型
在研究实际应用案例之前,了解案例的背景和技术选型对于理解后续的分析至关重要。案例的背景信息包括系统的目标、应用场景、性能要求等。技术选型则涉及到硬件平台、软件框架以及通信协议等。
### 4.3.2 系统集成和测试中的注意事项
在系统集成和测试阶段,需要对双线CAN通信的各个方面进行仔细检查和评估。从硬件的接线到软件的配置,都需要进行全面的测试以确保系统的稳定性和可靠性。
系统集成中可能遇到的问题包括数据冲突、通信中断、资源竞争等,测试中的注意事项则包括覆盖各种边界条件、异常情况以及性能瓶颈等。通过精心设计的测试计划和详尽的测试用例,可以最大限度地减少这些问题的发生。
```mermaid
graph TD
A[开始集成测试] --> B[硬件检查]
B --> C[软件配置校验]
C --> D[通信功能测试]
D --> E[性能评估]
E --> F[问题诊断]
F --> |存在问题| G[问题修复]
G --> E
F --> |无问题| H[集成测试完成]
```
通过以上步骤的分析和操作,我们可以确保嵌入式系统中双线CAN通信的实战技巧得到充分应用,并且在实际应用中得到有效的验证。
# 5. 调试、测试与优化策略
调试、测试和优化是确保双线CAN通信系统稳定运行的关键环节。在本章节中,我们将深入了解CAN通信调试工具和方法、测试流程和测试用例设计以及系统性能优化的不同策略。每个主题都会详细探讨,以保证5年以上的IT从业者也可以获得深入的洞见和实用的知识。
## 5.1 CAN通信调试工具和方法
调试是通信系统设计过程中的重要步骤,它能确保系统在实际运行中能够达到预期的性能和稳定性。
### 5.1.1 常用调试工具介绍
调试过程中使用正确的工具可以事半功倍。以下是几种常用的CAN通信调试工具:
- **逻辑分析仪**:能够捕获总线上的信号,进行波形分析,是调试物理层信号的首选工具。
- **CAN分析仪**:相比逻辑分析仪,CAN分析仪提供了更高级的功能,例如自动解码CAN报文,过滤特定ID,甚至模拟故障情况以测试系统的鲁棒性。
- **软件仿真工具**:在不依赖硬件的情况下进行网络模拟和报文传输,尤其适合在开发初期调试协议栈和应用层逻辑。
- **嵌入式调试器**:例如GDB、JTAG等,这些工具可以直接在嵌入式设备上进行调试,查看和修改内存、寄存器状态。
### 5.1.2 调试过程中的问题定位与解决
调试过程中的问题定位是确保CAN通信正确性的重要环节。以下是几个常见的步骤:
1. **确定故障症状**:观察系统在何种条件下出现故障,记录故障发生时的系统状态。
2. **使用CAN分析仪捕获数据**:利用CAN分析仪抓取异常情况下的CAN报文,了解故障前后的通信情况。
3. **检查硬件连接**:确认物理层连接是否正确,检查CAN总线的电气特性是否符合规范。
4. **软件调试**:在确认硬件无问题的情况下,使用嵌入式调试器检查软件逻辑,包括报文发送与接收逻辑是否符合预期。
5. **重现问题并修正**:在模拟环境中重现问题,逐一排查修改,直至问题得到解决。
## 5.2 测试流程和测试用例设计
测试流程是确保双线CAN通信系统在交付前达到规定质量标准的重要手段。
### 5.2.1 测试计划和测试用例的重要性
为了保证通信系统满足GMW3122规范,测试计划和测试用例的设计至关重要。一个好的测试计划包括:
- **测试目标**:明确测试的目的和预期达成的效果。
- **测试策略**:包括测试方法、测试工具选择和测试环境搭建。
- **测试范围**:明确哪些功能和特性需要测试。
- **测试资源**:包括所需的人力、时间和硬件资源。
- **风险评估**:识别可能的风险和障碍,并制定应对措施。
测试用例的设计需要覆盖所有功能点,并且需要重点测试以下几点:
- **基本功能**:如数据包的发送、接收和正确解析。
- **错误处理**:包括各种报文格式错误、总线冲突和超时处理。
- **性能测试**:如带宽使用、延迟和吞吐量。
- **可靠性测试**:长时间运行以检验系统的稳定性和可靠性。
### 5.2.2 针对GMW3122规范的测试用例设计
根据GMW3122规范的要求,以下是几个关键测试用例的设计:
- **报文传输延迟测试**:测试从发送到接收端报文的延迟,确保满足规定的时延要求。
- **报文传输速率测试**:验证在规定的报文长度和传输频率下,系统的吞吐量是否符合规范。
- **物理层测试**:检查电气特性,如差分电压、信号抖动和总线的隐性/显性状态。
- **网络负载下的性能测试**:模拟高负载情况下系统的响应时间和错误率。
- **故障恢复测试**:模拟网络故障,检验系统恢复到正常通信状态的时间和效率。
## 5.3 系统性能优化
在确保通信系统稳定运行之后,接下来需要关注的是性能优化,以提升系统效率和可靠性。
### 5.3.1 系统性能评估方法
性能评估包括但不限于以下几个方面:
- **吞吐量**:单位时间内处理的报文数量。
- **响应时间**:从请求发出到响应到达的总时间。
- **丢包率**:在正常运行情况下丢失的报文比例。
- **资源消耗**:包括CPU、内存等资源的使用情况。
### 5.3.2 基于GMW3122的性能调优策略
针对GMW3122规范的性能优化策略可能包括:
- **中断处理优化**:合理配置中断优先级,减少中断处理的时间,优化中断服务程序。
- **缓冲管理**:优化缓冲区的分配和管理策略,提升数据处理效率。
- **网络拓扑优化**:合理设计网络拓扑结构,减少传输延迟,避免可能的网络瓶颈。
- **协议栈配置优化**:根据实际需求调整CAN协议栈的配置,如过滤器设置和报文调度策略。
通过以上章节,我们介绍了双线CAN通信系统调试、测试和优化的策略和方法。这些内容不仅对新入行的开发者有指导意义,对于经验丰富的IT从业者也有很高的参考价值。
# 6. 未来趋势与技术展望
随着技术的不断演进,双线CAN通信技术也在持续发展。本章节将深入探讨该技术未来的发展方向,以及与相关技术的融合发展,旨在为读者提供对双线CAN通信技术未来应用前景的洞见。
## 6.1 双线CAN通信技术的未来发展方向
双线CAN通信技术,作为自动化和控制领域中极为重要的一环,正面临着新一代汽车通信标准和需求的挑战。
### 6.1.1 新一代汽车通信标准的影响
随着汽车电子化、智能化的趋势不断加速,新一代的汽车通信标准正在涌现。例如,汽车开放系统架构(AUTOSAR)为汽车通信提供了新的架构框架,使得车载网络更加灵活和可扩展。双线CAN通信技术需要与这些新兴标准保持兼容,并在性能和功能上作出相应的调整和优化,以满足未来汽车对实时性、安全性和可靠性的严苛要求。
### 6.1.2 双线CAN通信技术的潜在改进空间
双线CAN通信技术在保持其优势的同时,仍有改进空间。从协议层面,可以通过优化报文处理机制,减少冲突和延迟,提高通信效率。在物理层面,可以进一步增强其抗干扰能力,以适应恶劣的汽车工作环境。此外,随着半导体技术的进步,双线CAN控制器和收发器的集成度和处理能力还有提升的空间。
## 6.2 相关技术的融合发展
随着多种通信技术的发展,双线CAN通信技术与其他技术的融合已成为一个不可逆转的趋势。
### 6.2.1 双线CAN与其他通信技术的融合
双线CAN技术虽然在汽车工业中占据重要地位,但其并非独立存在。例如,在汽车网络中,它可以与以太网、LIN(Local Interconnect Network)和FlexRay等通信技术协同工作,形成多层网络架构。这种融合为实现车辆内部的复杂功能提供了更多可能,同时也为设计者提供了更高的灵活性和选择性。尤其是在数据量日益增长的智能网联汽车中,这样的融合能使得不同功能模块高效协作,提高整个车辆系统的性能。
### 6.2.2 新兴技术在双线CAN通信中的应用前景
新兴技术,如物联网(IoT)、人工智能(AI)和5G通信等,正在改变我们对数据处理和传输的理解。这些技术可与双线CAN通信技术相结合,提升车辆通信系统的智能化水平。例如,通过在车辆中集成AI算法,可以实现对CAN网络中传输数据的智能分析,从而优化车辆性能,增强安全监测能力。而5G技术则可以提升车辆与外界通信的速度和可靠性,进一步扩展车辆的功能和应用范围。
在预测未来的同时,我们还需要关注当前的技术发展和标准制定,确保我们设计的双线CAN通信系统能够与即将到来的技术变革相适应。双线CAN通信技术的未来充满着机遇和挑战,它的发展将继续推动汽车工业和相关领域向前发展。
在本章中,我们探讨了双线CAN通信技术的发展趋势和与其他技术的融合可能。这一技术仍在不断进步之中,与新兴技术的结合预示着它将在未来的汽车行业继续扮演关键角色。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 GMW3122 双线 CAN 物理层与数据链路层规范专栏,在这里您将深入了解双线 CAN 通信的方方面面。从物理层和数据链路层的原理到故障诊断和性能优化,我们的专家级文章将为您提供全面指南。掌握双线 CAN 通信的秘密武器,包括同步、时间管理、电源管理和互操作性测试。通过我们的实战技巧、故障排除攻略和优化解决方案,您将提升双线 CAN 通信的效率和可靠性。深入分析物理层故障案例和数据链路层性能监控,确保您的网络始终保持最佳状态。此外,我们还提供了网络部署攻略和权威测试方法,帮助您规划、实施和验证您的双线 CAN 系统。通过我们的专栏,您将成为双线 CAN 通信领域的专家,拥有解决复杂挑战和优化性能所需的知识和技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ADS滤波器设计全攻略】:新手必备的12个基础知识
参考资源链接:[ads 差分滤波器设计及阻抗匹配](https://wenku.csdn.net/doc/6412b59abe7fbd1778d43bd8?spm=1055.2635.3001.10343)
# 1. ADS滤波器设计概述
在无线通信、雷达系统以及信号处理领域,滤波器是实现信号选择性传输的核心组件。ADS(Advanced Design System)是一款功能强大的
【模拟信号转数字】:电压电流信号采集技术要点,让你秒变数据采集高手
参考资源链接:[STM32 ADC应用:太阳能电池板电压电流监测与数码管显示](https://wenku.csdn.net/doc/6412b75abe7fbd1778d49fed?spm=1055.2635.3001.10343)
# 1. 模拟信号与数字信号的基本概念
## 1.1 模拟信号的特性
模拟信号是时间连续且值连续的信号,它们可以通过连续变化的电压或电流来表示信息,例如人的声音和乐器的声音在麦克风中转换为电信
【CUDA vs OpenCL】:深度剖析选择GPGPU框架的决定性因素
参考资源链接:[GPGPU编程模型与架构解析:CUDA、OpenCL及应用](https://wenku.csdn.net/doc/5pe6wpvw55?spm=1055.2635.3001.10343)
# 1. CUDA与OpenCL框架概述
## 1.1 GPU计算的崛起
随着计算需求的不断提升,GPU(图形处理单元)已从单纯的图形渲染扩展到科学
Ambarella H22芯片全解析:如何在90天内实现性能跃升与系统优化
参考资源链接:[Ambarella H22芯片规格与特性:低功耗4K视频处理与无人机应用](https://wenku.csdn.net/doc/6401abf8cce7214c316ea27b?spm=1055.2635.3001.10343)
# 1. Ambarella H22芯片概述
Ambarella H22是一款先进的SoC芯片,它在视觉处理和A
STM32F4中断系统高级配置:库函数下的高效调试方法

参考资源链接:[STM32F4开发指南-库函数版本_V1.1.pdf](https://wenku.csdn.net/doc/6460ce9e59284
博通 WIFI6芯片调试技巧:专家级别的问题解决与调优秘籍

参考资源链接:[博通BCM6755:高性能WIFI6 SoC芯片详析](https://wenku.csdn.net/doc/595ytnkk26?spm=1055.2635.3001.10343)
# 1. WIFI6技术概述与芯片介绍
## WIFI6技
跨平台办公新时代:LibreOffice 7.1.8 AArch64的变革性体验
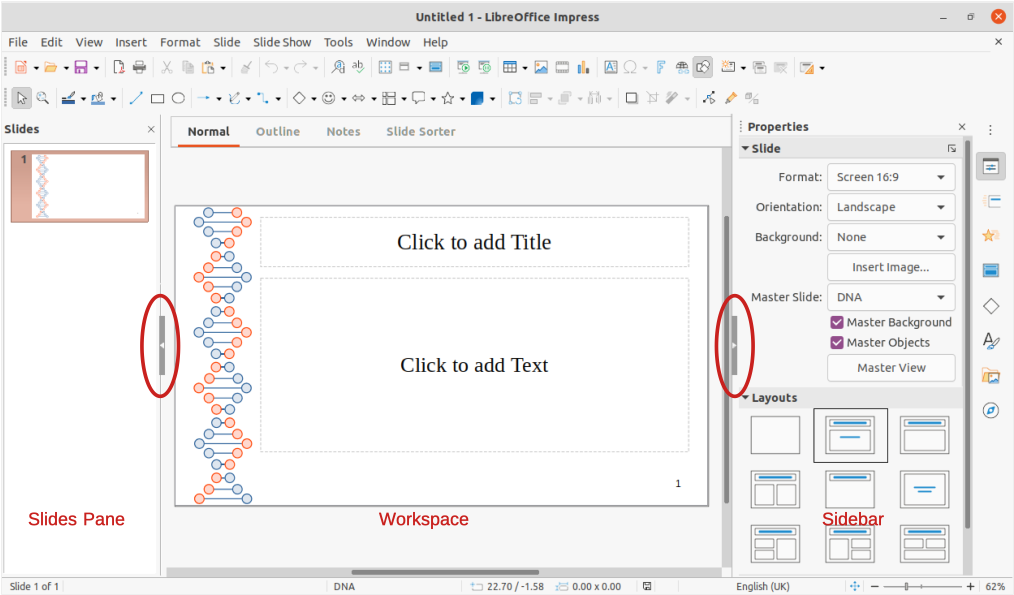
参考资源链接:[ARM架构下libreoffice 7.1.8预编译安装包](https://wenku.csdn.net/doc/2fg8nrvwtt?spm=1055.2635.3001.10343)
# 1. LibreOffice 7.1.8 AArch64简介
LibreOff
【版图设计实战】:CMOS反相器版图的先进工艺趋势与自动化工具应用
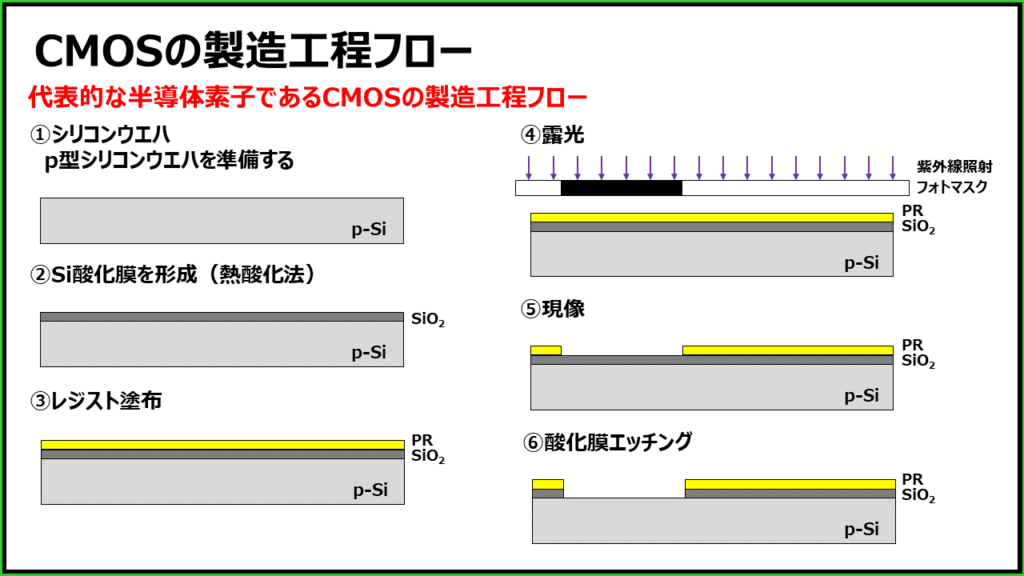
参考资源链接:[CMOS反相器版图设计原理与步骤](https://wenku.csdn.net/doc/7d3axkm5es?spm=1055.2635.3001.10343)
# 1. CMOS反相器的基础原理
## CMOS反相器简介
CMOS(Complementary Metal-Oxide-Semiconductor)反相器是数字集成电路中最基本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )