数据链路层协议分析:GMW3122双线CAN的多层架构设计
发布时间: 2024-12-14 16:02:51 阅读量: 4 订阅数: 9 

GMW_3122_2005.rar_Freescale_GM CAN_GMLAN_GMW 3122_GMW3122
参考资源链接:[GMW3122: 双线CAN物理层与数据链路层规范](https://wenku.csdn.net/doc/6412b675be7fbd1778d46cc0?spm=1055.2635.3001.10343)
# 1. 数据链路层概述与CAN协议基础
数据链路层是OSI模型中的第二层,负责建立、维护和解组链路通信,确保数据传输的正确性和有效性。它直接与物理层和网络层交互,提供了一系列功能,比如帧封装、错误检测、流量控制以及介质访问控制等。
在数据链路层中,CAN(Controller Area Network)协议是一种广泛应用的局域网络协议。它最初由德国Bosch公司为汽车应用开发,现在则广泛用于工业控制、医疗设备等领域。CAN协议以其高可靠性和灵活的网络拓扑而受到青睐。
本章将介绍数据链路层的基础知识,以及CAN协议的基本概念。我们将深入分析数据链路层在不同系统中的作用,并探讨CAN协议如何优化数据传输,为后续章节中GMW3122双线CAN协议的深入分析打下基础。
# 2. GMW3122双线CAN协议核心原理
## 2.1 GMW3122双线CAN协议技术规格
### 2.1.1 协议标准的制定背景与发展
GMW3122标准由美国汽车工程师协会(SAE)制定,主要针对汽车领域的线控系统设计,以满足日益增长的车辆网络通信需求。该标准的出现,旨在提供一种高可靠性的数据通信方案,特别适用于恶劣的电气环境和有限的物理空间。
自1992年首次发布以来,GMW3122经历了多次修订,不断适应新的技术变革和市场需求。随着车辆电子化程度的提升,对数据传输的准确性和实时性要求更高,GMW3122双线CAN协议通过其独特的双线差分传输特性,有效提升了通信的抗干扰能力和数据传输的稳定性。
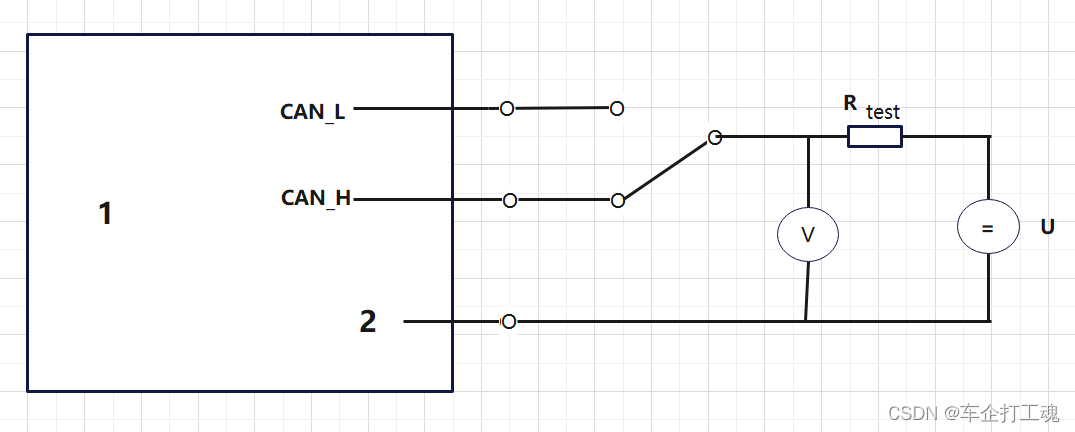
### 2.1.2 GMW3122双线CAN的物理层特征
GMW3122双线CAN物理层在设计上采用了双绞线作为传输介质,与传统单线CAN相比,它可以提供更优的电磁兼容性(EMC)和更低的位错误率。此外,其差分信号机制确保了在高速传输时信号的完整性和抗干扰能力,非常适合在复杂的电气环境中运行。
物理层的另一大特色是其高效的位定时机制。该机制允许设备在不同的网络环境下,自动调整其通信参数以匹配网络的物理特性。这不仅优化了通信速率,还增强了协议在各种车辆网络场景中的适应性。
## 2.2 数据封装与帧结构
### 2.2.1 数据封装的层次模型
GMW3122双线CAN协议中的数据封装遵循ISO/OSI模型。其中,数据链路层进一步细分为逻辑链路控制(LLC)子层和媒体访问控制(MAC)子层。LLC负责数据封装、错误检测及处理等高级逻辑,而MAC子层则处理帧的发送与接收,以及与物理介质的交互。
在封装过程中,协议首先将高层数据封装为帧格式,然后添加必要的控制信息如帧起始序列、帧长度、校验和等。最后,通过物理层将这些数据帧以电信号的形式发送到对端设备。
### 2.2.2 CAN帧结构和类型详解
GMW3122双线CAN协议支持标准帧和扩展帧两种类型。标准帧长度为11位标识符,扩展帧为29位,两者在数据封装的标识符部分有明显区分。
帧结构主要由以下部分组成:
- **帧起始**:标识帧的开始。
- **仲裁字段**:包含帧的标识符,用于标识符优先级竞争。
- **控制字段**:包含帧格式(标准或扩展)、DLC(数据长度代码)等。
- **数据字段**:实际要传输的数据内容,长度可在0~8字节范围内变化。
- **CRC字段**:循环冗余校验,用于帧的错误检测。
- **ACK字段**:应答场,接收端在正确接收到数据后会发送应答信号。
这些部分的组合,确保了数据在传输过程中的完整性和正确性。下面以标准帧的格式为例:
```plaintext
+----------------+----------------+-----------------+-----------------+
| 帧起始 1位 | 仲裁字段 11位 | 控制字段 6位 | 数据字段 0-8字节 |
+----------------+----------------+-----------------+-----------------+
| CRC字段 15位 | CRC界定符 1位 | ACK字段 2位 | 帧结束 7位 |
+----------------+----------------+-----------------+-----------------+
```
数据封装和帧结构的设计,保证了GMW3122双线CAN协议在面对各种网络请求和响应时的高效和可靠,成为了汽车网络通信的首选技术之一。
## 2.3 位定时与同步机制
### 2.3.1 位定时参数的配置和计算
位定时是CAN协议中至关重要的一环,关系到数据能否正确、及时地在网络中传播。GMW3122双线CAN协议通过精确配置位定时参数来实现这一功能。这些参数包括同步段(SYNC_SEG)、传播段(PROP_SEG)、相位缓冲段1(PHASE_SEG1)和相位缓冲段2(PHASE_SEG2),以及采样点位置。
- **同步段**:确定位时间的起始点,固定1个时间单位。
- **传播段**:补偿网络延迟和延迟变化,其持续时间可配置。
- **相位缓冲段1和2**:允许对时钟频率差异进行微调,时长可配置。
在具体配置时,通常会设定一个采样点,该点位于数据位时间的后部,用于确定数据的最佳采样时刻。配置过程依赖于实际的网络环境和传输速度。为了获得最佳的通信效率和可靠性,位定时参数的计算需要考虑信号的传播延迟、振荡器的精度、网络中的节点数量等因素。
### 2.3.2 同步机制在双线CAN中的应用
在GMW31

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 GMW3122 双线 CAN 物理层与数据链路层规范专栏,在这里您将深入了解双线 CAN 通信的方方面面。从物理层和数据链路层的原理到故障诊断和性能优化,我们的专家级文章将为您提供全面指南。掌握双线 CAN 通信的秘密武器,包括同步、时间管理、电源管理和互操作性测试。通过我们的实战技巧、故障排除攻略和优化解决方案,您将提升双线 CAN 通信的效率和可靠性。深入分析物理层故障案例和数据链路层性能监控,确保您的网络始终保持最佳状态。此外,我们还提供了网络部署攻略和权威测试方法,帮助您规划、实施和验证您的双线 CAN 系统。通过我们的专栏,您将成为双线 CAN 通信领域的专家,拥有解决复杂挑战和优化性能所需的知识和技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【故障排除】:Kingbase V7安装问题深度解析及解决策略(避免常见陷阱)
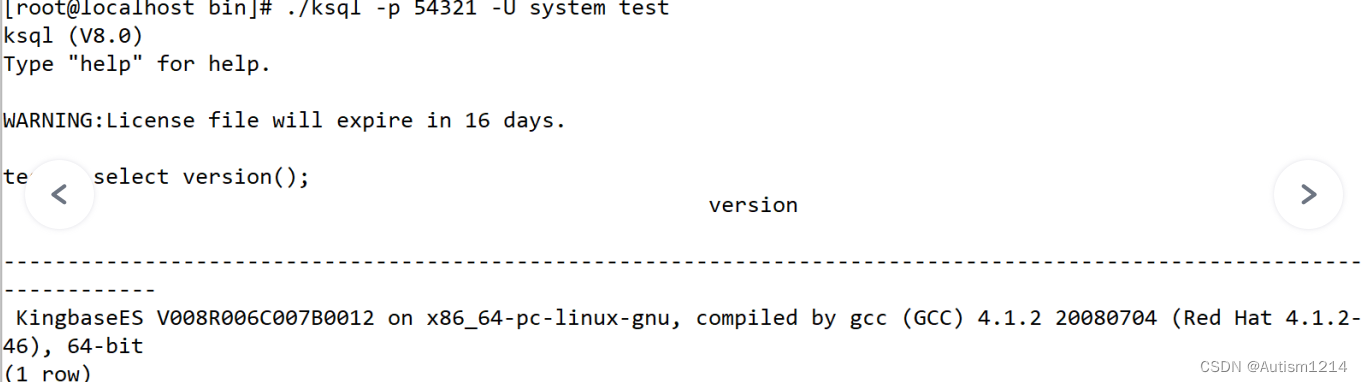
参考资源链接:[Windows环境下安装人大金仓KingBaseV7数据库指南](https://wenku.csdn.net/doc/1054wgxeim?spm=1055.2635.3001.10343)
# 1. Kingbase V7安装问题概述
## 1.1 安装前的准备工作
在开始安装Kingbase V7之前,需要确保所有准备工作都已经到位。这涉及到评估当前系统
【数值分析进阶秘籍】:破解速度提升图的稳定之谜
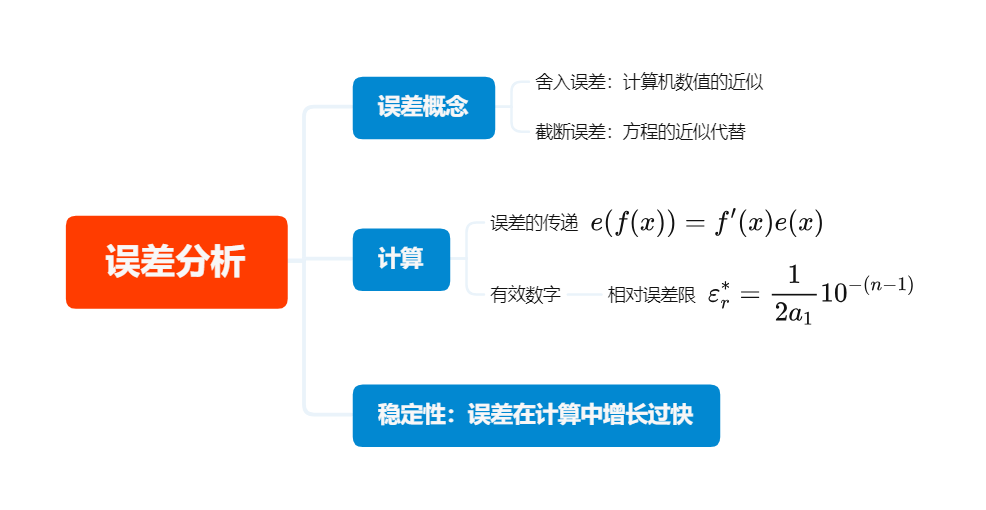
参考资源链接:[FLUENT软件速度矢量图显示详解及其应用](https://wenku.csdn.net/doc/2pmeyqgqj3?spm=1055.2635.3001.10343)
# 1. 数值分析与速度提升图的入门概念
数值分析是研究算法如何解决数学问题,并评估这些算
【WinHttp.WinHttpRequest.5.1与ASP.NET无缝整合】:企业级解决方案深度剖析
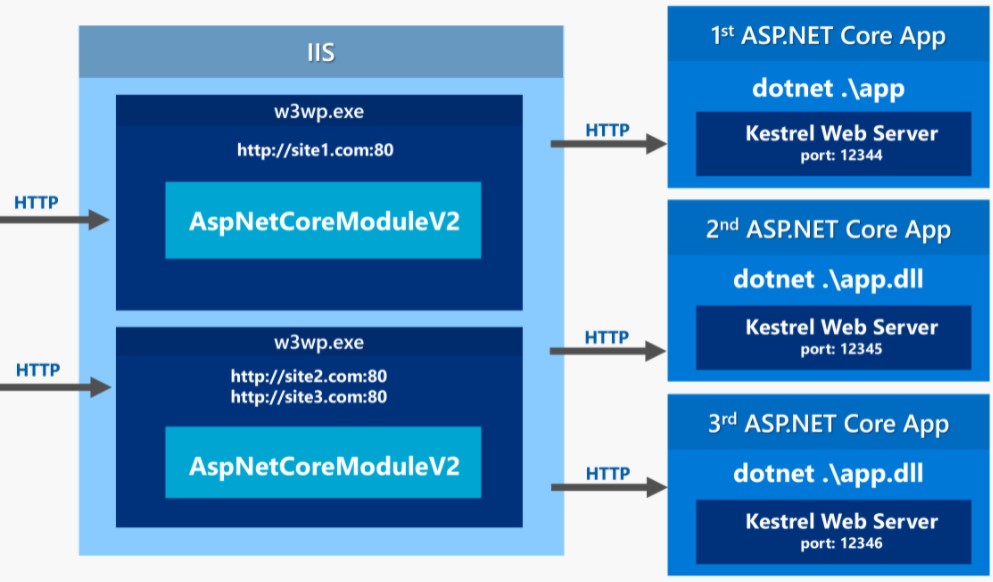
参考资源链接:[WinHttp.WinHttpRequest.5.1 API详解及使用指南](https://wenku.csdn.net/doc/6412b647be7fbd1778d4628b?spm=1055.2635.3001.10343)
# 1. WinHttp.WinHttpRequest.5.1概述
在
【故障与恢复策略】:PowerFactory电力系统可靠性提升秘籍
参考资源链接:[DIgSILENT PowerFactory入门教程:从基础到高级建模](https://wenku.csdn.net/doc/4410u6tcdr?spm=1055.2635.3001.10343)
# 1. PowerFactory电力系统简介
PowerFactory 是一款先进的电力系统仿真工具,广泛应用于电力系统的规划、运行和维护。其功能涵盖了从基本的潮流计算、短路计算、稳定性分析到复杂的电磁暂态分析和概率风险评估。
在 PowerFactory 中,用户可以构建电力网络模型,进行精确的负载流计算,以及模拟各种故障和扰动情况下的系统响应。这一强大的仿真平台也支持自
【JEDEC DDR4 SDRAM SPD实战】:内存参数设置的金标准
参考资源链接:[JEDEC DDR4 SDRAM SPD规范](https://wenku.csdn.net/doc/6412b4b4be7fbd1778d40863?spm=1055.2635.3001.10343)
# 1. JEDEC DDR4 SDRAM SPD概述
在当今的信息时代,数据传输的速度和效率是推动计算性能发展的重要因素。 JEDEC DDR4 SDRAM SP
人工智能与机器人学的交汇点:2023年最新趋势分析

参考资源链接:[机器人学导论(John J.Craig)第三章答案](https://wenku.csdn.net/doc/6412b47abe7fbd1778d3fb8d?spm=1055.2635.3001.10343)
# 1. 人工智能与机器人学的融合概述
在当今科技迅速发展的时代,人工智能(AI)与机器人学的融合已经成为了推动科技进步的重要力量。AI不仅赋予了机
【模拟信号数字化实战】:六大常见问题的快速解决与预防策略
参考资源链接:[模拟信号数字化处理详解:采样、量化与编码](https://wenku.csdn.net/doc/1j19a4i27g?spm=1055.2635.3001.10343)
# 1. 模拟信号数字化基础概述
在信息技术迅猛发展的今天,模拟信号数字化作为信息采集和处理的关键环节,对于整个数据处理流程至关重要。数字化过程涉及将模拟信号转换为数字信号,这需要通过采样、量化和编
【物联网网络革命】:DW Ethernet Databook 3.50a在智能设备中的应用

参考资源链接:[Designware GMAC IP Ethernet Databook v3.50a - FPGA网络设计参考资料](https://wenku.csdn.net/doc/64697ddc543f844488bed52e?spm=1055.26
【Origin图表与标注:打造高信息量与精确度的图形】:专业指南
参考资源链接:[Origin坐标轴与标注指南:中文、希腊字母与特殊符号](https://wenku.csdn.net/doc/6401aba3cce7214c316e8f6d?spm=1055.2635.3001.10343)
# 1. Origin图表基础知识
## 1.1 图表的基本概念
Origin是一款广泛应用于科学图表制作和数据分析的专业
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )