目标追踪与魅力机器人导航系统的设计及优化
发布时间: 2024-02-29 19:05:42 阅读量: 38 订阅数: 17 

《机器人控制系统的设计与Matlab仿真 》仿真程序
# 1. 导论
## 1.1 研究背景与意义
随着人工智能和自动驾驶技术的快速发展,机器人导航系统在智能机器人领域扮演着越来越重要的角色。目标追踪与导航系统作为机器人领域中的关键技术之一,不仅可以应用于智能家居、服务机器人等领域,还在工业生产和仓储物流等领域有着广阔的应用前景。因此,研究目标追踪与魅力机器人导航系统的设计及优化具有重要的意义。
## 1.2 目标追踪与导航系统概述
目标追踪是指机器人在移动过程中对目标进行持续跟踪和定位,而导航系统则是指机器人在环境中规划路径、避障并到达目标位置的过程。两者结合起来,可以实现机器人在复杂环境下的智能导航和目标追踪,提高机器人的自主性和适应性。
## 1.3 研究内容与目的
本文旨在针对目标追踪与导航系统中存在的挑战和问题,设计并优化魅力机器人导航系统,提高目标追踪的准确性和导航的智能化水平。具体包括目标识别与跟踪技术、导航算法优化、智能决策与路径规划等方面的研究内容。
## 1.4 论文结构
本文共分为六个章节,首先是导论部分,介绍研究背景与意义,总结目标追踪与导航系统的概述,明确研究内容与目的,最后对全文的结构进行概述。接下来将介绍相关技术与方法、魅力机器人导航系统设计、系统性能评估、优化方案探讨和结论与展望等内容,以全面阐述目标追踪与魅力机器人导航系统的设计及优化过程。
# 2. 相关技术与方法
在机器人导航系统的设计与优化中,相关技术与方法的选择至关重要。本章将对机器人导航技术、目标追踪算法、传感器技术以及计算机视觉在目标追踪中的地位进行综述与分析,为后续章节的系统设计与优化提供技术支持和参考。
### 2.1 机器人导航技术综述
在机器人导航技术中,常用的方法包括里程计定位、激光SLAM、视觉SLAM等。里程计定位通过测量车轮旋转量来估计机器人的位置,激光SLAM利用激光雷达扫描地图并自定位,视觉SLAM则通过摄像头采集图像进行实时定位与建图。
```python
# Python 里程计定位示例代码
def calculate_robot_position(wheel_rotation):
# 根据车轮旋转量计算机器人位置
pass
```
### 2.2 目标追踪算法研究
目标追踪算法在导航系统中起着至关重要的作用,常见的算法包括卡尔曼滤波、粒子滤波、深度学习目标检测等。这些算法能够实现对目标的实时跟踪与识别。
```java
// Java 深度学习目标检测示例代码
public class ObjectDetection {
public void detectObject(Frame frame) {
// 使用深度学习算法检测目标
}
}
```
### 2.3 传感器技术在导航系统中的应用
传感器技术在导航系统中扮演

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
High-Level Synthesis实践指南:一步到位从理论到部署
# 摘要
随着集成电路设计复杂度的提升,High-Level Synthesis(HLS)作为一种基于高级语言自动综合硬件的技术变得日益重要。本文首先介绍了HLS的基本概念和理论基础,包括硬件描述语言与HLS的关系以及HLS在硬件设计中的作用。随后,详细探讨了HLS的关键技术如算法级转换、循环优化和资源共享与调度。在此基础上,本文讨论了HLS实践技巧,包括工具选择、编码实践和项目案例分析。此外,还着重研究了HLS的优化策略,涵盖了性能、功耗和面积优化的方法。最后,本文对HLS生成的IP核验证和在实际项目中的应用进行了分析,并对未来趋势进行了预测。
# 关键字
High-Level Synth
【LabVIEW信号处理进阶】:提升至专家级的6种butterworth低通滤波器设计方法
# 摘要
本文全面介绍了LabVIEW在信号处理领域中的应用,并特别专注于Butterworth低通滤波器的设计与实现。首先概述了LabVIEW及其在信号处理中的优势,接着探讨了Butterworth滤波器的基础理论,包括滤波器设计原理和性能影响因素。文章深入阐述了在LabVIEW环境中采用内置函数和自定义
【掌握研华PCI-1285-AE高级编程】:揭秘5个高级功能解锁技巧
# 摘要
本文详细介绍了研华PCI-1285-AE控制器的特性和应用,涵盖硬件接口、软件开发环境和高级编程技巧。首先,通过探讨PCI-1285-AE的硬件架构及其接口类型和特性,阐述了数据采集与控制的基础。接着,文章深入讲解了软件开发环境的组成,包括开发工具链、编程接口、SDK的使用,以及驱动程序和固件的更新。进一步,文章重点讨论了高级编程技巧,如高精度数据采集、多任务并发处理以及高级触发机制的应用。最后,文章提供了关于系统集成与优化的策略,包括性能调优、数据吞吐率提升,以及实际应用案例和解决方案的讨论。本文旨在为开发者提供全面的PCI-1285-AE控制器使用和优化指南。
# 关键字
研华
C++模板编程深度解析:代码复用与灵活性提升秘笈
# 摘要
本文深入探讨了C++模板编程的核心概念、高级特性以及实际应用。首先介绍了模板类和函数的实现原理,包括其定义、实例化以及模板参数的种类和限制。接着,分析了模板特化与偏特化的技巧,模板元编程的原理,以及模板与继承的结合使用。文章还详述了模板在代码复用中的应用,如标准模板库(STL)的核心组件、模板在设计模式中的应用,以及模板与多态性结合的策略。在实践与案例分析章节中,讨论了模板库的设计与实现、模
晶晨芯片TTL激活故障排除:避免失败的绝招(专家支招)

# 摘要
晶晨芯片TTL激活是电子工程领域内的一项重要技术,本论文旨在探讨其基础理论、常见问题、故障排除方法以及高级应用。首先介绍了晶晨芯片TTL激活的基础知识和理论基础,包括TTL信号的定义、特性以及激活的工作模式。随后,详细分析了常见问题及其原因和表现,阐述了故障排除的理论和实践应用,重点介绍了故障定位、解决技巧及系统优化方法。文章还探讨了晶晨芯片TTL激活的
嵌入式系统的磁场革命:如何100%集成MMC5983MA磁场传感器
# 摘要
本文详细介绍了嵌入式系统与MMC5983MA磁场传感器的集成与应用。首先,概述了嵌入式系统及磁场传感器的基础知识,然后深入探讨了MMC5983MA传感器的技术原理、关键特性以及与现有技术的对比优势。实践操作章节提供了硬件集成和软件驱动开发的具体步骤,同时强调了在实际应用中遇到的问题及解决方案。进阶应用与创新实践章节讨论了高级数据处理技术和嵌入式系统交互式应用开发。最后,文章总结了集成MMC5983MA传感器的经验教训,并对其未来发展趋势进行了展望,指出了创新对行业的深远影响。
# 关键字
嵌入式系统;磁场传感器;MMC5983MA;硬件集成;软件驱动;数据处理;创新应用
参考资源
Veeam RMAN Plugin进阶秘籍:故障排除与优化,提升备份效率
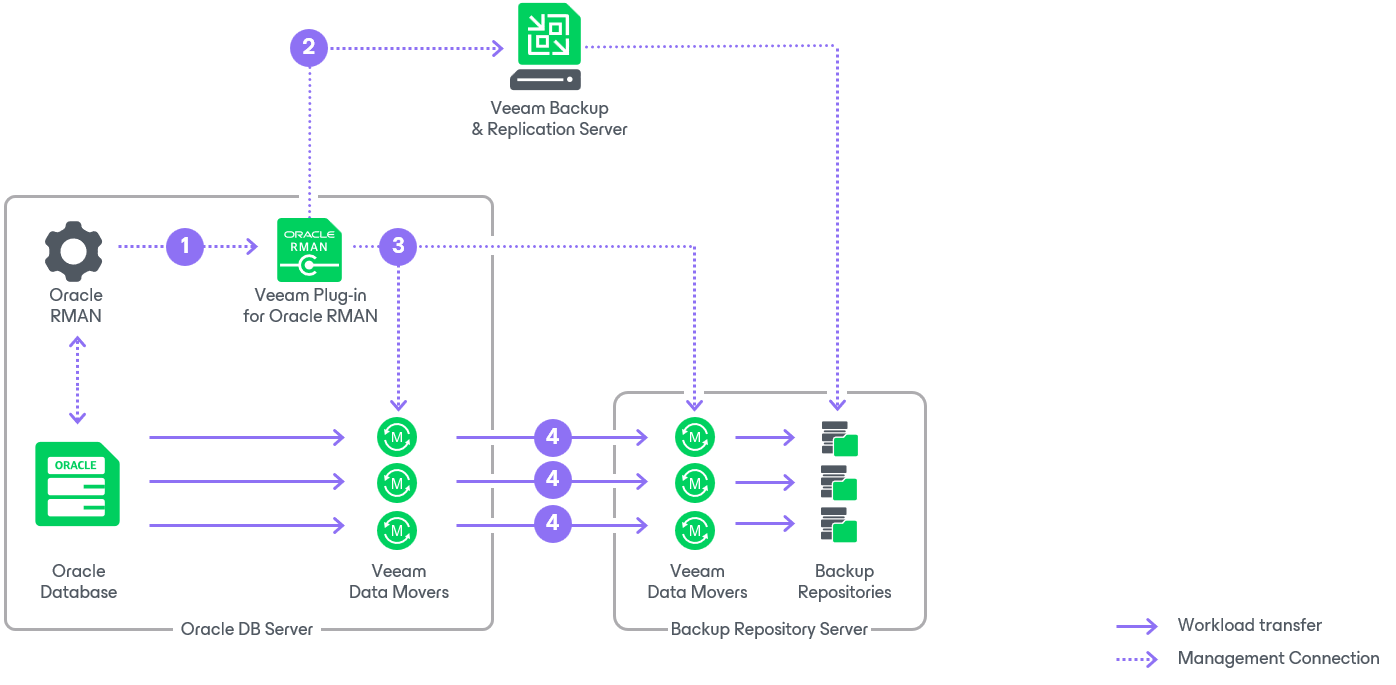
# 摘要
本文全面介绍了Veeam RMAN Plugin的应用及故障排除、备份效率优化策略,并探讨了自动化故障诊断和优化实践。文章首先概述了Veeam RMAN Plugin的基本概念,并对故障排除前的准备工作、常见诊断方法和实践案例进行了深入分析。在备份效率优化方面,本文详细阐述了理解性能指标、优
【RS485通信协议精要】:2小时掌握流量计数据采集要点

# 摘要
RS485通信协议广泛应用于工业自动化和数据采集领域,因其良好的电气特性和多点通信能力而受到青睐。本文首先对RS485通信协议的基础知识进行了介绍,包括技术特点、网络拓扑结构以及数据格式。随后,本文详细探讨了RS485在流量计数据采集中的应用,涉及流量计协议解析、接口技术以及数据采集实例。文章进一步阐述了RS485通信协议的实践操作,包括硬件搭建、软件编程及通信协议栈的实现。此外,本文还提供了RS485通信协
电气符号解读:强电系统图的标准与应用

# 摘要
本文探讨了强电系统图的基础知识、标准化解读、绘制与应用以及安全故障诊断,并展望了其未来发展趋势和在教育中的应用。文章首先介绍了电气符号的分类、定义及国际与国内标准的对比。接着阐述了强电系统图绘制的基本原则和应用实例,强调了其在工程设计中的重要性。此外,还详细论述了强电系统图中的安全防范措施、故障诊断方法和系统图在维护和升级中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )