ROS机器人操作系统与魅力机器人控制技术细节
发布时间: 2024-02-29 19:00:17 阅读量: 22 订阅数: 14 
# 1. ROS机器人操作系统简介
## 1.1 ROS的定义和发展历程
Robot Operating System(ROS)是一个灵活且功能强大的机器人操作系统,最初由斯坦福大学人工智能实验室于2007年开发。ROS旨在为机器人开发提供一个灵活的框架,支持各种形式的硬件和软件平台。
在过去的十多年里,ROS已经成为全球范围内最受欢迎的机器人操作系统之一。许多大型机器人项目和研究实验室都在使用ROS来开发各种类型的机器人应用。
## 1.2 ROS的核心组件与架构
ROS的核心组件包括节点(Nodes)、话题(Topics)、服务(Services)和消息(Messages)。节点是ROS中最基本的单元,每个节点可以执行特定的任务,并通过话题进行通讯。
话题是节点之间传递消息的通道,节点可以发布(Publish)消息到一个话题,也可以订阅(Subscribe)来自话题的消息。服务允许节点请求执行特定任务,并等待其他节点的响应。
## 1.3 ROS的优势及应用领域
ROS的优势在于其开放源代码、强大的社区支持、丰富的工具和库,以及易于扩展和定制。ROS广泛应用于各种领域,包括工业自动化、智能交通、医疗保健、军事应用等。
## 1.4 ROS与传统机器人操作系统的区别
相对于传统的机器人操作系统,ROS具有更高的灵活性和可定制性。ROS采用分布式架构,允许用户将不同功能模块组合在一起,实现复杂的机器人行为。传统的机器人操作系统通常采用集中式架构,限制了系统的扩展性和灵活性。
# 2. ROS中的核心概念与工具
在ROS(Robot Operating System)中,有一些核心概念和工具是非常重要的,它们构成了ROS系统的基础,并为机器人控制提供了强大的支持。下面将介绍ROS中的一些核心概念和工具:
### 2.1 节点(Nodes)与话题(Topics)
在ROS中,节点(Nodes)是指执行特定任务的进程,它们可以相互通信以实现整个系统的协作。节点通过发布(Publish)和订阅(Subscribe)话题(Topics)来进行通信。话题是一种消息传输机制,节点可以向话题发布消息,也可以从话题接收消息。通过话题,不同节点之间可以实现数据共享和信息传递。
```python
# 一个发布者节点的Python示例
import rospy
from std_msgs.msg import String
rospy.init_node('publisher_node')
pub = rospy.Publisher('chatter', String, queue_size=10)
rate = rospy.Rate(1) # 1Hz
while not rospy.is_shutdown():
pub.publish('Hello, ROS!')
rate.sleep()
```
### 2.2 服务(Services)与行为(Actions)
除了通过话题进行消息传递外,ROS还支持通过服务(Services)和行为(Actions)来实现节点之间的通信。服务是一种请求-响应的通信模式,节点可以提供某种服务,并等待其他节点的请求来调用该服务;行为是一种更高级的通信形式,它允许节点执行某种长期的任务,并在任务完成或失败时向调用方返回状态。
```python
# 一个服务端节点的Python示例
import rospy
from std_srvs.srv import Empty, EmptyResponse
def handle_call(req):
rospy.loginfo('Service called')
return EmptyResponse()
rospy.init_node('service_node')
srv = rospy.Service('my_service', Empty, handle_call)
rospy.spin()
```
### 2.3 ROS消息通讯机制
ROS中的消息是通过特定类型的数据结构来进行传递的,消息可以是标准消息类型(如String、Int32等),也可以是自定义的消息类型。通过消息通讯机制,节点可以以结构化的方式交换数据,并实现复杂的功能。
```python
# 一个订阅者节点的Python示例
import rospy
from std_msgs.msg import String
def callback(msg):
rospy.loginfo('Received: %s', msg.data)
rospy.init_node('subscriber_node')
sub = rospy.Subscriber('chatter', String, callback)
rospy.spin()
```
### 2.4 ROS工具集介绍及使用方法
ROS提供了丰富的工具集来帮助开发者进行机器人控制和调试,其中包括RViz(可视化工具)、RQT(ROS插件化工具)、roslaunch(启动文件管理工具)等。这些工具可以大大提高开发效率,简化调试过程。
```bash
# 使用roslaunch启动多个节点的示例命令
roslaunch package_name launch_file.launch
```
以上就是ROS中一些核心概念与工具的介绍,深入理解这些内容将有助于更好地使用ROS进行机器人控制与开发。
# 3. 魅力机器人控制技术概述
魅力机器人作为一种集智能、互动、移动等功能于一体的机器人系统,其控制技术需求和挑战也相对较高。本章将从魅力机器人的定义和特点出发,探讨魅力机器人控制技术的发展趋势以及ROS在魅力机器人控制中的应用案例。
### 3.1 魅力机器人的定义和特点
魅力机器人是一种综合了人工智能、语音识别、情感交互等技术的智能机器人,其核心特点包括:
- 智能交互:能够与人类
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实战演练】综合案例:数据科学项目中的高等数学应用

# 1. 数据科学项目中的高等数学基础**
高等数学在数据科学中扮演着至关重要的角色,为数据分析、建模和优化提供了坚实的理论基础。本节将概述数据科学
【实战演练】前沿技术应用:AutoML实战与应用

# 1. AutoML概述与原理**
AutoML(Automated Machine Learning),即自动化机器学习,是一种通过自动化机器学习生命周期
【实战演练】通过强化学习优化能源管理系统实战
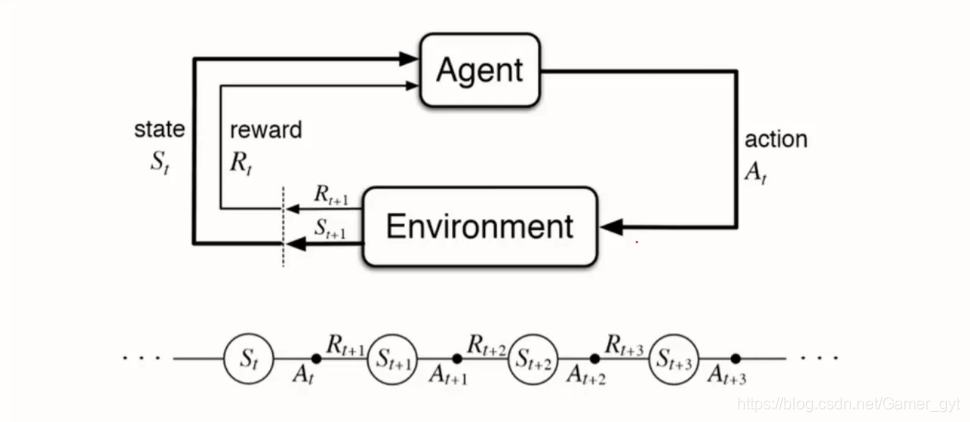
# 2.1 强化学习的基本原理
强化学习是一种机器学习方法,它允许智能体通过与环境的交互来学习最佳行为。在强化学习中,智能体通过执行动作与环境交互,并根据其行为的
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
【实战演练】深度学习在计算机视觉中的综合应用项目

# 1. 计算机视觉概述**
计算机视觉(CV)是人工智能(AI)的一个分支,它使计算机能够“看到”和理解图像和视频。CV 旨在赋予计算机人类视觉系统的能力,包括图像识别、对象检测、场景理解和视频分析。
CV 在广泛的应用中发挥着至关重要的作用,包括医疗诊断、自动驾驶、安防监控和工业自动化。它通过从视觉数据中提取有意义的信息,为计算机提供环境感知能力,从而实现这些应用。
# 2.1 卷积
【实战演练】python远程工具包paramiko使用
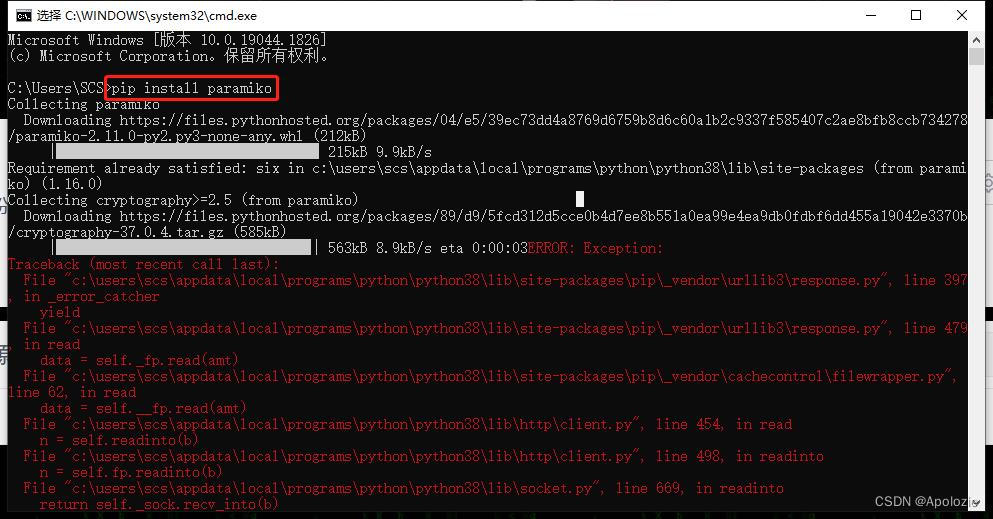
# 1. Python远程工具包Paramiko简介**
Paramiko是一个用于Python的SSH2协议的库,它提供了对远程服务器的连接、命令执行和文件传输等功能。Paramiko可以广泛应用于自动化任务、系统管理和网络安全等领域。
# 2. Paramiko基础
### 2.1 Paramiko的安装和配置
**安装 Paramiko**
```python
pip install
【实战演练】python云数据库部署:从选择到实施
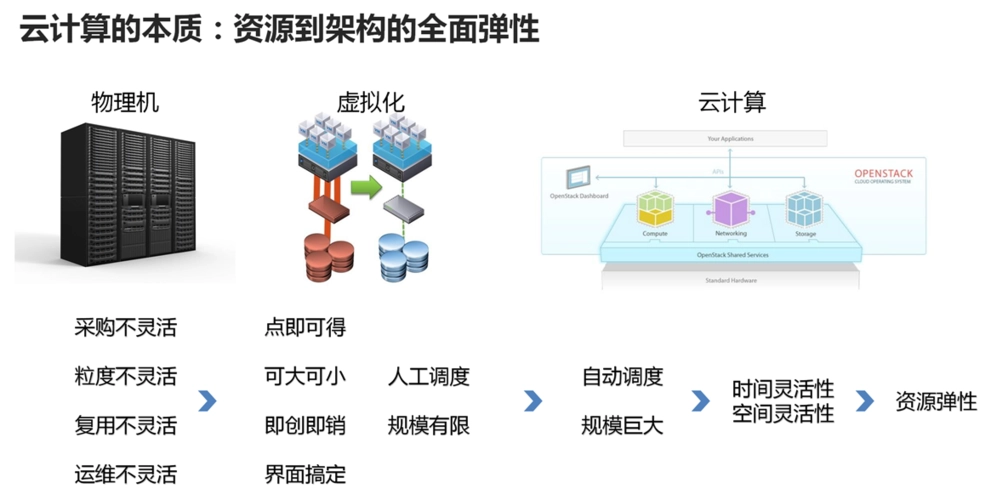
# 2.1 云数据库类型及优劣对比
**关系型数据库(RDBMS)**
* **优点:**
* 结构化数据存储,支持复杂查询和事务
* 广泛使用,成熟且稳定
* **缺点:**
* 扩展性受限,垂直扩展成本高
* 不适合处理非结构化或半结构化数据
**非关系型数据库(NoSQL)**
* **优点:**
* 可扩展性强,水平扩展成本低
【进阶】异步编程基础:使用asyncio

# 1. **2.1 asyncio事件循环**
asyncio事件循环是一个无限循环,它不断地从事件队列中获取事件并执行它们。事件循环是异步编程的核心,它负责管理协
【实战演练】时间序列预测项目:天气预测-数据预处理、LSTM构建、模型训练与评估

# 1. 时间序列预测概述**
时间序列预测是指根据历史数据预测未来值。它广泛应用于金融、天气、交通等领域,具有重要的实际意义。时间序列数据通常具有时序性、趋势性和季节性等特点,对其进行预测需要考虑这些特性。
# 2. 数据预处理
### 2.1 数据收集和清洗
#### 2.1.1 数据源介绍
时间序列预测模型的构建需要可靠且高质量的数据作为基础。数据源的选择至关重要,它将影响模型的准确性和可靠性。常见的时序数据源包括:
【实战演练】使用Docker与Kubernetes进行容器化管理
# 2.1 Docker容器的基本概念和架构
Docker容器是一种轻量级的虚拟化技术,它允许在隔离的环境中运行应用程序。与传统虚拟机不同,Docker容器共享主机内核,从而减少了资源开销并提高了性能。
Docker容器基于镜像构建。镜像是包含应用程序及
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )