步进电机在可再生能源中的应用:风力涡轮机和太阳能追踪系统,绿色能源新利器
发布时间: 2024-07-20 21:24:48 阅读量: 42 订阅数: 44 

PLC和步进电机在梳理机改造中的应用

# 1. 步进电机概述
步进电机是一种将电脉冲信号转换为角位移或线位移的机电装置。它通过逐级旋转来控制位置,每个脉冲对应一个固定的角度或距离。步进电机具有以下特点:
- 精确的定位能力:步进电机可以精确地控制其转子位置,即使在低速下也是如此。
- 开环控制:步进电机不需要反馈传感器来确定其位置,使其控制系统简单可靠。
- 高扭矩输出:步进电机在低速时可以产生较高的扭矩,使其适用于需要高启动扭矩的应用。
# 2. 步进电机在风力涡轮机中的应用
### 2.1 风力涡轮机系统概述
风力涡轮机是一种将风能转化为电能的装置,主要由叶片、轮毂、机舱、塔架和基础组成。叶片是风力涡轮机的核心部件,负责将风能转化为旋转动能。轮毂将叶片连接到机舱,机舱内安装有发电机和变速箱。塔架将机舱升高到一定高度,以获得更好的风力资源。基础将风力涡轮机固定在地面上。
### 2.2 步进电机在风力涡轮机中的作用
步进电机在风力涡轮机中主要用于叶片调节和偏航控制。
#### 2.2.1 叶片调节
叶片调节是指根据风速和风向调整叶片角度,以优化风力涡轮机的发电效率。步进电机通过改变叶片根部的角度来实现叶片调节。当风速过大时,步进电机将叶片角度减小,以减少风力对叶片的冲击力,防止叶片损坏。当风速过小时,步进电机将叶片角度增大,以增加风力对叶片的冲击力,提高发电效率。
#### 2.2.2 偏航控制
偏航控制是指调整风力涡轮机机舱的方向,以使叶片始终面向迎风面。步进电机通过改变机舱尾部的方向来实现偏航控制。当风向发生变化时,步进电机将机舱尾部调整到与风向一致的方向,以确保叶片始终获得最大的风力。
### 2.3 步进电机在风力涡轮机中的控制策略
步进电机在风力涡轮机中的控制策略主要包括开环控制和闭环控制。
#### 2.3.1 开环控制
开环控制是指根据预设的控制参数直接控制步进电机,不考虑实际的叶片角度或机舱方向。这种控制策略简单易行,但控制精度较低。
#### 2.3.2 闭环控制
闭环控制是指根据实际的叶片角度或机舱方向反馈信号来控制步进电机。这种控制策略可以提高控制精度,但控制系统复杂度较高。
**代码块:步进电机开环控制代码**
```python
import RPi.GPIO as GPIO
# 定义步进电机引脚
step_pins = [11, 12, 13, 15]
# 设置步进电机步长
step_count = 4096
# 设置步进电机速度
speed = 1000
# 初始化GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.setup(step_pins, GPIO.OUT)
# 控制步进电机旋转
for i in range(step_count):
for j in range(4):
GPIO.output(step_pins[j], GPIO.HIGH)
time.sleep(speed / 1000000)
GPIO.output(step_pins[j], GPIO.LOW)
```
**代码逻辑分析:**
该代码使用开环控制策略控制步进电机。代码首先定义了步进电机引脚、步长和速度。然后初始化GPIO并设置步进电机引脚为输出模式。最后,代码控制步进电机旋转,通过依次输出高电平和低电平到步进电机引脚来实现。
**参数说明:**
* step_pins:步进电机引脚列表
* s

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面探讨了步进电机的各个方面,从控制技术到应用领域。它提供了 10 个关键点,帮助您理解步进电机控制。它还提供了步进电机驱动器选型指南,指导您匹配电机、负载和应用。此外,它还分享了优化步进电机性能的秘诀,包括降低噪音和振动。专栏深入探讨了步进电机在工业自动化、医疗设备、机器人技术、半导体制造、航空航天、可再生能源、电动汽车、消费电子、医疗成像和科学仪器等领域的应用。它还涵盖了步进电机控制算法、建模和仿真、测试和验证、设计和制造以及教育和研究方面的知识。本专栏旨在为工程师、技术人员和学生提供有关步进电机的全面指南,帮助他们了解、选择、优化和应用这些电机。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ngspice全面速成课】:一步登天掌握电路仿真核心技巧!
# 摘要
ngspice是广泛使用的开源电路仿真软件,它为电路设计人员提供了一个强大而灵活的平台,以进行各类电路设计的模拟和分析。本文首先概述了ngspice的起源、发展以及安装步骤。接着介绍了ngspice的基础操作,包括命令行界面的使用、电路图的输入编译和仿真的执行与结果分析。本文的进阶部分探讨了模型参数定义、多仿真模式的综合运用以及特殊功能的应用技巧。在实际电路设
【LAMMPS脚本编写技巧】:新手也能快速变成高手的7个步骤

# 摘要
LAMMPS(Large-scale Atomic/Molecular Massively Parallel Simulator)是一种用于分子动力学模拟的软件,它通过强大的脚本语言对模拟进行控制和管理。本文旨在为LAMMPS用户提供一个全面的脚本编写
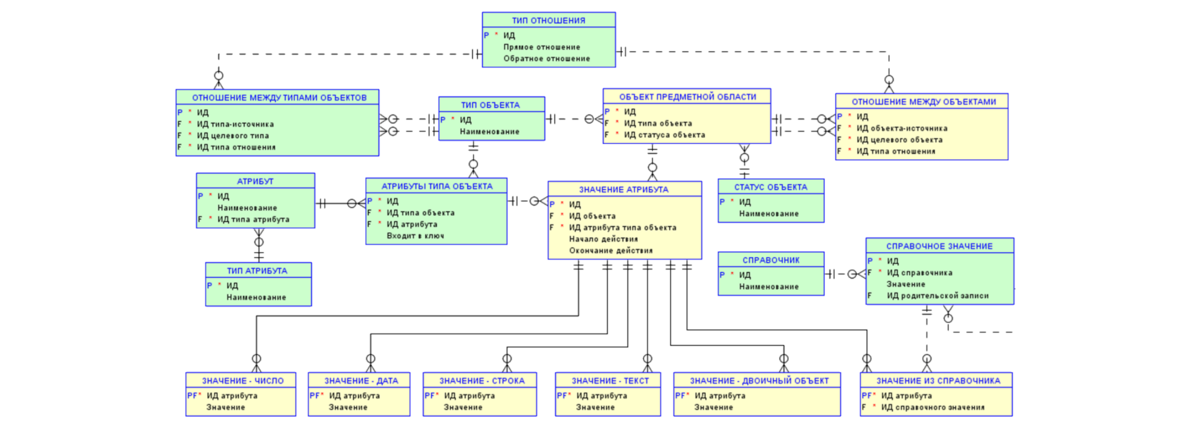
【高效ER图构建指南】:保险公司设计师必避的常见错误
# 摘要
实体关系图(ER图)作为数据库设计的重要工具,在软件工程中扮演着基础而关键的角色。本文从ER图的基础知识和重要性开始,深入探讨了ER图构建的理论基础、常见错误以及实践指南。通过对ER图基本元素、设计原则、与其他数据库模型转换的详细解析,本文进一步分析了保险公司在ER图构建过程中遇到的常见错误,并提出了相应的解决方案。最后,本文介绍了ER图的进阶技巧与优化方法,包括高级
【必学】:FANUC机器人的大脑——控制器全面解析

# 摘要
本文全面探讨了FANUC机器人控制器的架构、软件系统及其应用。首先概述了控制器的硬件组成,包括CPU单元、内存、I/O接口模块、驱动器和电机接口等,并详细分析了电源模块设计以及散热系统的重要性。接着,深入剖析了控制器的操作系统、实时性特征、编程环境以及诊断与维护工具。文章还探讨了控制器在运动控制、逻辑顺序控制以及人机界面(HMI)集成方面的应用,并论述了与机器视觉、AI和机器学习以及云集成
跨平台UI开发深度解析:Renewal UI框架的五大秘诀

# 摘要
本文旨在全面介绍Renewal UI框架,一个面向跨平台UI开发的解决方案。首先概述了跨平台UI开发的挑战与机遇,随后详细阐述了Renewal UI框架的核心理念、设计理念、架构组成和技术原理。文中分析了框架的核心技术、渲染机制及性能优化策略
面板数据FGLS估计深度解析:Stata实战操作与高级技巧
# 摘要
本文旨在深入探讨面板数据模型及其估计方法,重点分析固定效应模型和随机效应模型的理论基础与估计技术,并讨论两者的选择标准。文中详细介绍了FGLS估计方法,包括其理论框架、优势、局限、实施步骤和参数选择,以及在实际软件Stata中的应用。此外,文章还探讨了面板数据FGLS估计的高级技巧,如时间序列与面板数据结合的前处理、跨单位异方差性与自相关问题的检验与处理、动态模型的估计等。
VB图像编程基础

# 摘要
Visual Basic (VB) 作为一种广泛使用的编程语言,其在图像编程方面的应用具有重要意义。本文旨在概述VB图像编程的基础知识、技术细节及其在实际应用中的体现。首先介绍了VB的图形对象和绘图基础,包括图形对象的概念、属性、方法以及绘图环境的配置。随后深入探讨图像处理技术,涵盖图像加载、显示、编辑以及效果增强等内容。通过案例分析,展示了如何开发图像处理软件、进行图像识别与分析以及动画和多媒体应用的开发。本文还探讨了
物联网时代的新选择:构建智能系统的SGM58031B指南

# 摘要
在物联网的迅猛发展中,智能系统作为核心组件,其性能和安全性成为行业关注的焦点。本文首先概述了物联网智能系统的作用及关键技术要求,随后深入探讨了SGM58031B微控制器的核心特性和功能,重点分析了其硬件架构、软件支持和网络功能。接着,本文介绍了搭建基础环境的步骤,包括硬件和软件环境的配置,以及网络和安全措施的实施。在此基础上,文章详细描述了SGM58031B在智能系统
红外循迹技术核心揭秘:从基础到工业应用的全面指南

# 摘要
红外循迹技术在自动控制领域发挥着重要作用,具有高精度和高稳定性的特点。本文首先介绍了红外循迹技术的原理和基础,随后探讨了红外传感器的工作机制、选型、校准及测试方法。接着,文章深入分析了红外循迹系统的构建与优化,包括系统设计、组装调试及性能评估。在此基础上,本文进一步探讨了红外循迹技术在工业自动化、精密定位跟踪及智能交通系统中的应用实例和策略。最后,展望了红外循迹技术的未来发展趋势和面临的技术挑战,提出了相应的解决方案和研究方向。
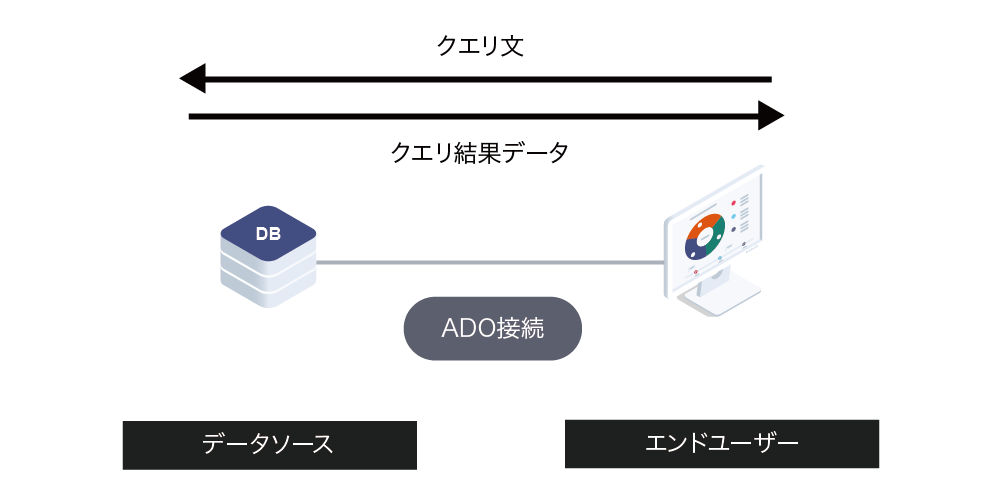
【信息化系统数据流分析】:数据流动的艺术与科学
# 摘要
信息化系统中数据流的高效管理和优化对于系统的稳定性和性能至关重要。本文首先概述了数据流的基本概念及其在信息系统中的重要性,进而从理论和实证两个维度深入分析数据流的模型、流动特性、优化策略、监控技术和安全合规性问题。通过案例研究,本文揭示了数据流监控与异常处理的实践方法,并探讨了数据流管理系统的架构设计及其集成与重构策略。文章最后展望了数据流分析的未来趋势,重点关注
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )