机器人故障诊断与维护:快速定位与解决策略的完整流程
发布时间: 2024-12-25 22:53:14 阅读量: 7 订阅数: 13 

白色简洁的艺术展示网页模板下载.zip

# 摘要
随着机器人技术的发展,其在工业和服务业的应用日益广泛,故障诊断与维护成为确保机器人可靠性和效率的关键环节。本文旨在全面介绍机器人故障诊断与维护的基本理论、实践操作以及未来发展趋势。首先阐述了机器人系统的组成和故障类型,接着详细讨论了故障诊断的理论基础、工具选择和具体操作流程。文章还探讨了故障解决的策略,并通过案例分析分享了解决经验。最后,本文展望了未来机器人维护技术的进步方向,包括自动化、智能化技术的应用,信息化管理系统的推广以及远程技术支持的发展,同时指出了行业面临的挑战和应对措施。
# 关键字
机器人故障诊断;故障类型;维护策略;自动化技术;人工智能;远程监控
参考资源链接:[飓风机器人使用与编程指南](https://wenku.csdn.net/doc/1dehj7qdz6?spm=1055.2635.3001.10343)
# 1. 机器人故障诊断与维护概论
随着工业自动化和智能制造的发展,机器人在生产线上的应用变得越来越普遍。然而,机器人作为高度集成的机电设备,在长期运行中不可避免地会出现各种故障,这不仅影响生产效率,还可能导致安全事故。因此,故障诊断与维护工作成为机器人持续稳定运行的关键环节。本章将从概论的角度,对机器人故障诊断与维护进行简单介绍,为后续章节中对故障诊断理论、实践操作以及未来发展趋势的深入探讨奠定基础。
接下来,我们将探讨故障诊断的基础理论,包括机器人的系统组成与工作原理、常见故障的类型与特点,以及故障诊断中所使用的工具与设备。随后,我们将深入讨论故障诊断的实践操作,提供系统性的故障诊断流程和现场处理技巧,以及预防性维护与故障预测的方法。在这些基础之上,第四章将分享故障解决的策略与案例分析,最后,第五章将探讨面向未来的机器人维护技术,包括自动化与智能化故障诊断技术、维护信息化与远程技术支持,以及机器人维护的行业趋势与挑战。
# 2. 故障诊断的基础理论
在深入探讨故障诊断技术之前,理解机器人系统的组成与工作原理是至关重要的。这将帮助我们建立起一套完备的理论基础,为后续的故障分析和维护工作打下坚实的基础。
## 2.1 机器人系统的组成与工作原理
### 2.1.1 机器人硬件架构解析
一个典型的机器人系统由多个子系统构成,包括但不限于动力系统、控制系统、执行系统和传感系统。动力系统提供了机器人的动作源力,通常是通过电机和液压系统实现。控制系统则充当了机器人的大脑,负责处理输入信号并输出控制指令。执行系统直接与任务相关,涵盖了各种机械臂、末端执行器等。传感系统为机器人提供了“感官”,允许它理解和适应外部环境。
下面通过一个简化的代码块来解释一个假想机器人的硬件架构:
```plaintext
// 假设的机器人硬件架构代码块
class RobotHardware {
MotorSystem motorSystem;
ControlSystem controlSystem;
ExecutionSystem executionSystem;
SensorSystem sensorSystem;
// 机器人动作的主循环
void mainLoop() {
while (true) {
// 读取传感器数据
sensorData = sensorSystem.readData();
// 处理数据并生成指令
controlSignal = controlSystem.processData(sensorData);
// 执行指令
executionSystem.execute(controlSignal);
}
}
}
// 控制系统的简单实现
class ControlSystem {
// 处理数据方法
ControlSignal processData(SensorData data) {
// 根据传感器数据生成控制信号
// ...
}
}
// 其他硬件子系统类实现略...
```
### 2.1.2 软件系统和控制逻辑基础
机器人软件系统通常包括底层控制程序、操作界面和应用程序接口(API)。控制逻辑是机器人软件核心,它依赖于算法来实现对硬件的精准控制。控制逻辑的代码块可能看起来像这样:
```c
// 简单的控制逻辑伪代码
void moveArmToPosition(int x, int y, int z) {
// 将目标位置转换为电机控制信号
ControlSignal signal = convertToControlSignal(x, y, z);
// 发送信号到电机控制系统
motorControl.sendSignal(signal);
// 等待电机到达指定位置
waitForPositionReached();
}
// 信号转换函数
ControlSignal convertToControlSignal(int x, int y, int z) {
// 实现转换逻辑...
return new ControlSignal(...);
}
// 等待位置到达函数
void waitForPositionReached() {
// 检测当前位置,直到其与目标位置匹配...
}
```
控制逻辑的复杂性可以非常高,包括但不限于运动规划、路径优化、碰撞检测以及反馈控制等多种高级算法。
## 2.2 常见故障的类型和特点
### 2.2.1 电气故障的诊断方法
电气故障是机器人系统中最常见的一类问题,涉及到电路、电源、电机等电气部件的异常。诊断电气故障通常涉及以下几个步骤:
- 使用万用表测量电压和电流,检查电源是否稳定。
- 检查控制信号是否正常,排除软件故障的可能性。
- 通过示波器分析波形,寻找不规则信号。
- 检查电路板和电缆连接,寻找短路或接触不良的迹象。
```plaintext
// 伪代码示例,电气故障诊断流程
def diagnoseElectricalIssue() {
// 测量电源电压
float voltage = measureVoltage();
// 检查控制信号
bool controlSignalOK = checkControlSignal();
// 分析波形
bool waveformOK = analyzeWaveform();
// 检查电缆连接
bool connectionOK = checkCableConnection();
// 综合检查结果
if (voltage < MIN_VOLTAGE || !controlSignalOK || !waveformOK || !connectionOK) {
return "Found electrical issue.";
} else {
return "No electrical issues found.";
}
}
```
### 2.2.2 机械故障的识别与分析
机械故障通常涉及传动机构、运动部件的磨损或损坏。通过以下几个步骤来识别和分析:
- 审视机器人表面是否有明显的裂痕或损坏。
- 检查运动部件是否

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了机器人技术的各个方面,为读者提供了全面了解这一快速发展的领域的指南。从基础概念到先进应用,专栏涵盖了机器人技术101、编程语言、ROS操作系统、视觉系统、传感器融合、手臂控制、语音交互、ROS2、动力学建模、自主学习、路径规划、项目管理、故障诊断和工业自动化中的机器人技术等主题。通过深入浅出的讲解和实用技巧,专栏旨在帮助读者掌握机器人技术的核心原理,并将其应用于各种实际应用中。无论您是机器人技术的新手,还是经验丰富的专业人士,本专栏都将为您提供宝贵的见解和指导,助力您开启智能自动化之旅。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JLINK_V8固件烧录故障全解析:常见问题与快速解决
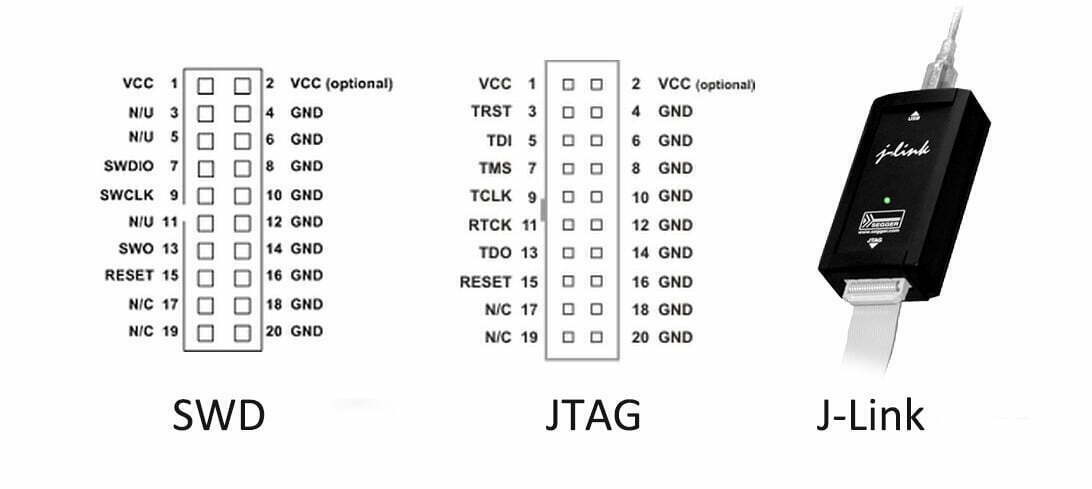
# 摘要
JLINK_V8作为一种常用的调试工具,其固件烧录过程对于嵌入式系统开发和维护至关重要。本文首先概述了JLINK_V8固件烧录的基础知识,包括工具的功能特点和安装配置流程。随后,文中详细阐述了烧录前的准备、具体步骤和烧录后的验证工作,以及在硬件连接、软件配置及烧录失败中可能遇到的常见问题和解决方案
【Jetson Nano 初识】:掌握边缘计算入门钥匙,开启新世界

# 摘要
本论文介绍了边缘计算的兴起与Jetson Nano这一设备的概况。通过对Jetson Nano的硬件架构进行深入分析,探讨了其核心组件、性能评估以及软硬件支持。同时,本文指导了如何搭建Jetson Nano的开发环境,并集成相关开发库与API。此外,还通过实际案例展示了Jetson Nano在边缘计算中的应用,包括实时图像和音频数
MyBatis-Plus QueryWrapper故障排除手册:解决常见查询问题的快速解决方案
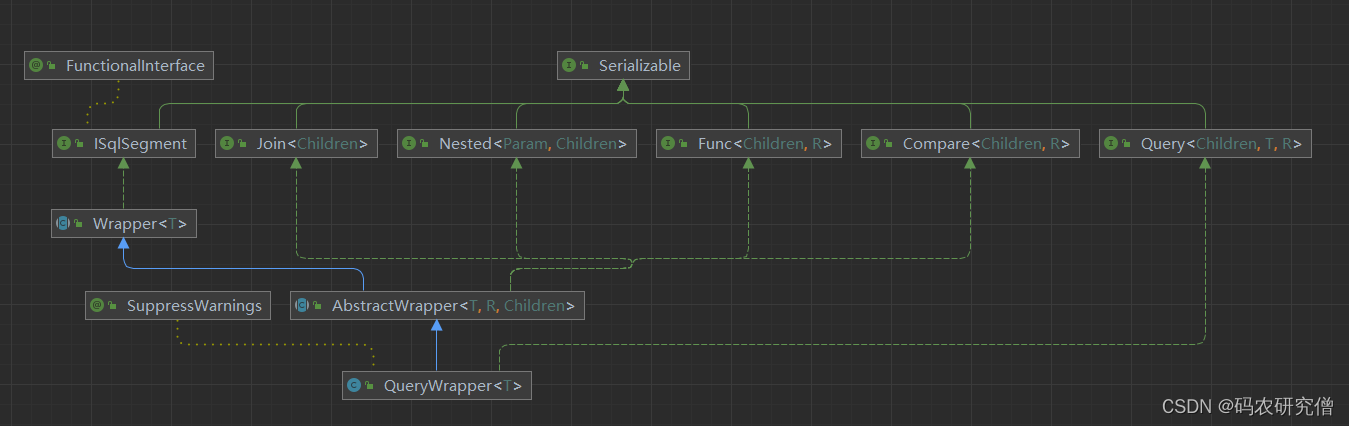
# 摘要
MyBatis-Plus作为一款流行的持久层框架,其提供的QueryWrapper工具极大地简化了数据库查询操作的复杂性。本文首先介绍了MyBatis-Plus和QueryWrapper的基本概念,然后深入解析了QueryWrapper的构建过程、关键方法以及高级特性。接着,文章探讨了在实际应用中查询常见问题的诊断与解决策略,以及在复杂场
【深入分析】SAP BW4HANA数据整合:ETL过程优化策略

# 摘要
SAP BW4HANA作为企业数据仓库的更新迭代版本,提供了改进的数据整合能力,特别是在ETL(抽取、转换、加载)流程方面。本文首先概述了SAP BW4HANA数据整合的基础知识,接着深入探讨了其ETL架构的特点以及集成方法论。在实践技巧方面,本文讨论了数据抽取、转换和加载过程中的优化技术和高级处理方法,以及性能调优策略。文章还着重讲述了ETL过
电子时钟硬件选型精要:嵌入式系统设计要点(硬件配置秘诀)

# 摘要
本文对嵌入式系统与电子时钟的设计和开发进行了综合分析,重点关注核心处理器的选择与评估、时钟显示技术的比较与组件选择、以及输入输出接口与外围设备的集成。首先,概述了嵌入式系统的基本概念和电子时钟的结构特点。接着,对处理器性能指标进行了评估,讨论了功耗管理和扩展性对系统效能和稳定性的重要性。在时钟显示方面,对比了不同显示技术的优劣,并探讨了显示模块设计和电源管理的优化策略。最后,本
【STM8L151电源设计揭秘】:稳定供电的不传之秘

# 摘要
本文对STM8L151微控制器的电源设计进行了全面的探讨,从理论基础到实践应用,再到高级技巧和案例分析,逐步深入。首先概述了STM8L151微控制器的特点和电源需求,随后介绍了电源设计的基础理论,包括电源转换效率和噪声滤波,以及STM8L151的具体电源需求。实践部分详细探讨了适合STM8L151的低压供电解决方案、电源管理策略和外围电源设计。最后,提供了电源设计的高级技巧,包括
NI_Vision视觉软件安装与配置:新手也能一步步轻松入门

# 摘要
本文系统介绍NI_Vision视觉软件的安装、基础操作、高级功能应用、项目案例分析以及未来展望。第一章提供了软件的概述,第二章详细描述了软件的安装流程及其后的配置与验证方法。第三章则深入探讨了NI_Vision的基础操作指南,包括界面布局、图像采集与处理,以及实际应用的演练。第四章着重于高级功能实
【VMware Workstation克隆与快照高效指南】:备份恢复一步到位

# 摘要
VMware Workstation的克隆和快照功能是虚拟化技术中的关键组成部分,对于提高IT环境的备份、恢复和维护效率起着至关重要的作用。本文全面介绍了虚拟机克隆和快照的原理、操作步骤、管理和高级应用,同时探讨了克隆与快照技术在企业备份与恢复中的应用,并对如何
【Cortex R52 TRM文档解读】:探索技术参考手册的奥秘
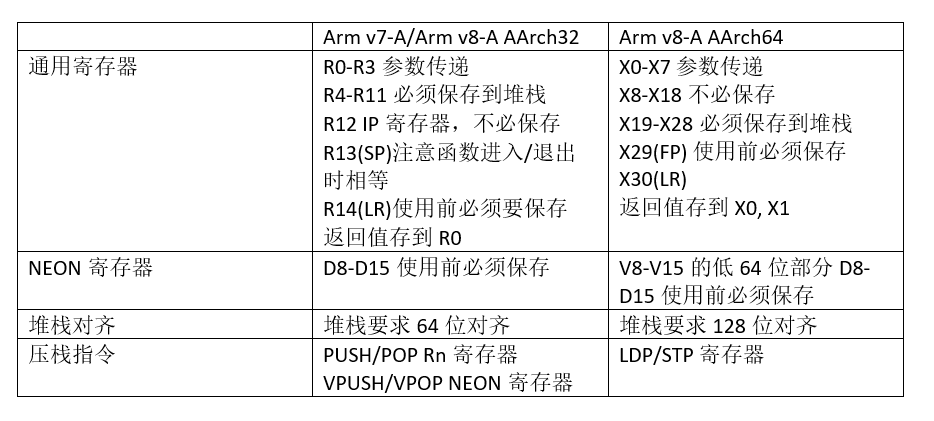
# 摘要
本文深入探讨了Cortex R52处理器的各个方面,包括其硬件架构、指令集、调试机制、性能分析以及系统集成与优化。文章首先概述了Cortex R52处理器的特点,并解析了其硬件架构的核心设计理念与组件。接着,本文详细解释了处理器的执行模式,内存管理机制,以及指令集的基础和高级特性。在调试与性能分析方面,文章介绍了Cortex R52的调试机制、性能监控技术和测试策略。最后,本文探讨了Cortex R52与外部组件的集成,实时操作系统支持,以及在特定应
西门子G120变频器安装与调试:权威工程师教你如何快速上手

# 摘要
西门子G120变频器在工业自动化领域广泛应用,其性能的稳定性与可靠性对于提高工业生产效率至关重要。本文首先概述了西门子G120变频器的基本原理和主要组件,然后详细介绍了安装前的准备工作,包括环境评估、所需工具和物料的准备。接下来,本文指导了硬件的安装步骤,强调了安装过程中的安全措施,并提供硬件诊断与故障排除的方法。此外,本文阐述了软件配置与调试的流程,包括控制面板操作、参数设置、调试技巧以及性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )