深度ROS应用:如何打造先进的机器人操作系统
发布时间: 2024-12-25 21:34:43 阅读量: 11 订阅数: 13 

机器人操作系统(ROS)经典中文教程.pdf

# 摘要
本文全面介绍了ROS(Robot Operating System)的体系结构、核心概念、系统集成、高级主题和项目开发流程。首先,概述了ROS的基础知识和哲学,然后深入解析了其核心概念,包括节点通信、服务与动作、参数服务器与包管理。在系统集成与实践方面,探讨了ROS与硬件接口的集成、多机器人系统的应用以及导航与定位技术。高级主题章节讨论了实时性能优化、人工智能与ROS的融合以及在云平台的部署。最后,本文探讨了ROS项目开发的整个流程,包括规划、设计、开发、测试、部署与维护,并分析了ROS社区文化、学习资源和未来发展趋势。
# 关键字
ROS;节点通信;服务动作;参数服务器;多机器人系统;实时性能优化;人工智能;云平台部署;项目开发流程;社区文化;未来趋势
参考资源链接:[飓风机器人使用与编程指南](https://wenku.csdn.net/doc/1dehj7qdz6?spm=1055.2635.3001.10343)
# 1. ROS基础与哲学
## 1.1 ROS的历史起源
Robot Operating System(ROS)不仅仅是一个操作系统,它是一个用于机器人的开源元操作系统,提供了类似于操作系统的服务,但它实际上是一个可复用的软件框架。自2007年由斯坦福人工智能实验室(SAIL)和Willow Garage公司开发以来,ROS已经成为机器人开发领域最为流行的软件框架之一。
## 1.2 ROS的核心哲学
ROS鼓励“可复用的软件”和“分而治之”的编程哲学。通过将复杂的机器人系统分解成可重复使用的模块,开发者可以专注于解决特定问题,而不是重复构建基础性功能。这种模块化的方法促进了代码的共享,简化了复杂系统的协作开发。
## 1.3 ROS的设计原则
ROS遵循几个关键的设计原则,包括节点的松耦合、基于图形的通信机制以及工具和数据的统一性。它支持多种编程语言,并提供广泛的服务、消息传递、存储和可视化工具,使得开发者能够构建功能丰富且可扩展的机器人应用。
## 1.4 ROS的分布式处理
在ROS中,节点(Nodes)是执行单个或多个功能的进程,它们通过发布(Publish)和订阅(Subscribe)消息进行通信。这种分布式处理架构使得系统既灵活又具有很好的可扩展性。通过利用主题(Topics)和消息(Messages),节点之间可以进行异步通信,从而实现高度模块化的设计。
## 1.5 ROS的社区与资源
ROS有一个庞大且活跃的全球社区,社区成员包括研究人员、爱好者和商业实体。社区提供了丰富的教程、文档和工具,这对于学习和使用ROS至关重要。通过参与社区,开发者可以获得帮助,分享知识,并获得对新趋势和技术的洞察。
这一章为读者介绍了ROS的起源、核心哲学、设计原则和社区资源,为接下来深入探讨ROS的核心概念打下了坚实的基础。
# 2.1 ROS的节点与通信机制
### 2.1.1 节点(Nodes)的基本概念与创建
在ROS(Robot Operating System,机器人操作系统)中,节点(Nodes)是构成ROS系统的基础单元,是执行处理任务的最小独立程序模块。每个节点都专注于执行一个特定的功能,例如传感器数据的处理、数据的发布或接收等。在ROS中,节点的创建和管理都遵循一定的编程范式,使得它们可以轻松地在分布式系统中进行通信和协作。
创建一个ROS节点通常需要以下几个步骤:
1. 初始化节点:通过调用`rospy.init_node()`函数,为节点创建一个唯一的名称,并且可以定义一些节点的参数。
2. 发布者(Publisher)和订阅者(Subscriber)的创建:通过`rospy.Publisher`和`rospy.Subscriber`类创建数据的发布和接收接口。
3. 主循环:在主循环中,节点处理数据、调用回调函数,以及进行各种业务逻辑的处理。
下面是一个简单的Python ROS节点创建的示例代码:
```python
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def talker():
# 初始化节点
rospy.init_node('talker', anonymous=True)
# 创建一个Publisher,发布名为"chatter"的话题,消息类型为String
pub = rospy.Publisher('chatter', String, queue_size=10)
# 设置发布频率
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
# 创建一个String消息实例
hello_str = "hello world %s" % rospy.get_time()
# 发布消息
pub.publish(hello_str)
# 按照设定频率休眠
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
```
在这个例子中,我们首先导入了`rospy`和`std_msgs.msg.String`模块。`talker`函数是程序的核心,它初始化了一个节点,并创建了一个名为`chatter`的话题发布者。在这个话题上,节点将以每秒10次的频率发布字符串消息。
在ROS中,节点之间通过话题(Topics)进行消息的发布和订阅,实现了数据流的解耦合通信。话题通信模型是ROS的核心通信机制之一,将在下一小节详细介绍。
### 2.1.2 主题(Topics)通信模型与实践
ROS中的主题(Topics)通信模型是一种基于发布/订阅模式的异步通信机制。通过这种机制,节点可以发布消息到某个特定的话题,而订阅了该话题的其他节点则可以接收到这些消息。这种发布和订阅的解耦合特性让ROS系统能够支持灵活和动态的数据通信。
创建一个主题通信模型涉及以下关键步骤:
1. **定义消息类型**:所有通过主题传递的消息都有一个定义好的消息类型。ROS提供了多种标准消息类型,用户也可以自定义消息类型。
2. **创建发布节点**:负责将数据发布到主题上。发布节点需要创建一个发布者(Publisher),并将要传递的消息类型关联到特定的话题。
3. **创建订阅节点**:负责接收主题中的数据。订阅节点需要创建一个订阅者(Subscriber),订阅特定话题,并定义回调函数来处理接收到的消息。
下面是一个简单的发布和订阅的例子,包括发布节点和订阅节点的代码:
**发布节点代码:**
```python
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def publisher():
# 初始化节点
rospy.init_node('publisher', anonymous=True)
# 创建Publisher,发布到"chatter"话题,消息类型为String
pub = rospy.Publisher('chatter', String, queue_size=10)
# 设置循环频率
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
# 创建消息实例
str_msg = "hello"
# 发布消息
pub.publish(str_msg)
# 按照设定频率休眠
rate.sleep()
if __name__ == '__main__':
try:
publisher()
except rospy.ROSInterruptException:
pass
```
**订阅节点代码:**
```python
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def subscriber():
# 初始化节点
rospy.init_node('subscriber', anonymous=True)
# 创建Subscriber,订阅"chatter"话题
rospy.Subscriber("chatter", String, callback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
subscriber()
```
在ROS的通信模型中,发布者和订阅者之间的通信是完全解耦的。这种通信模型适用于实时性要求不是非常高,但需要高解耦合和高扩展性的场景。例如,传感器数据的实时采集和处理,控制指令的下发等。
通过主题通信模型的实践,开发者可以实现复杂的系统架构,利用节点的模块化设计来实现高效和可扩展的机器人系统。同时,这也为ROS系统的集成和优化提供了坚实的基础。
# 3. ROS系统集成与实践
## 3.1 ROS与硬件接口
### 3.1.1 传感器数据的集成与处理
集成传感器到ROS系统中是构建机器人感知世界能力的基础。传感器的数据通常需要经过一系列处理,才能被ROS节点正确读取和利用。以激光雷达(LIDAR)为例,其数据的集成通常涉及以下步骤:
首先,硬件接口层负责读取传感器原始数据。大多数传感器都支持标准的接口或协议,比如USB、I2C或SPI,或者专用的接口如ROS支持的UART接口。在ROS中,`sensor_msgs/LaserScan`消息类型常用于表示激光雷达的数据。
以下是一个示例代码块,展示如何在ROS中读取激光雷达数据:
```python
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import LaserScan
def scan_callback(msg):
# 处理激光雷达扫描数据
print("Range: ", msg.ranges[100]) # 打印特定角度的数据
if __name__ == '__main__':
rospy.init_node('scan_listener', anonymous=True)
rospy.Subscriber('/scan', LaserScan, scan_callback)
rospy.spin() # 保持节点运行以持续接收数据
```
### 3.1.2 执行器控制的实现与策略
执行器控制是机器人的输出部分,它执行机器人根据软件决定的动作。在ROS中实现执行器控制,一般通过发布`control_msgs/JointControllerCommand`消息或者自定义消息到对应的执行器话题上。
在控制过程中,一般会结合传感器反馈,实现闭环控制。以下是一个基于简单的比例-积分-微分(PID)控制算法的代码块,用于控制机器人的运动:
```python
#!/usr/bin/env python
import rospy
from control_msgs.msg import JointControllerCommand
from std_msgs.msg import Float64
class PIDController:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.previous_error = 0
self.integral = 0
def compute(self, current_value, target_value):
error = target_value - current_value
self.integral += error
derivative = error - self.previous_error
output = self.kp * error + self.ki * self.integral + self.kd * derivative
self.previous_error = error
return output
if __name__ == '__main__':
rospy.init_node('joint_position_pid', anonymous=True)
pid = PIDController(0.1, 0.01, 0.005)
pub = rospy.Publisher('/my_joint_controller/command', Float64, queue_size=10)
rospy.Subscriber('/my_joint_controller/state', Float64, lambda msg: None) # 不使用回调
rate = rospy.Rate(10) # 10 Hz
target_position = 1.0 # 目标位置
while not rospy.is_shutdown():
current_position = # 获取当前位置数据
command = pid.compute(current_position, target_position)
pub.publish(command)
rate.sleep()
```
## 3.2 ROS在多机器人系统中的应用
### 3.2.1 多机器人通信机制的构建
在多机器人系统中,构建有效的通信机制至关重要。ROS提供了多种通信方式,包括话题(Topics)、服务(Services)和动作(Actions)等,来支持复杂通信模式。
在多机器人系统中,话题通信是最常见的,因为它适合于一对多或多对多的通信模式。话题通信可以使用ROS的发布/订阅模型。为确保数据的一致性,通常使用命名空间来区分不同机器人的相同话题。
例如,对于两个机器人协同工作,可以设计如下的话题命名策略:
- `/robot1/sensor_data`
- `/robot2/sensor_data`
这样,每个机器人都可以订阅对方的话题,并获取需要的数据。
## 3.2.2 协同任务规划与执行的策略
在多机器人系统中,协同任务规划包括路径规划、任务分配、状态同步等。一般地,一个协同任务规划与执行策略可以通过以下步骤实现:
1. **任务分解:** 首先将一个复杂任务分解为多个子任务,子任务可以是顺序执行也可以是并行执行的。
2. **角色分配:** 根据机器人能力与任务需求,将子任务分配给各个机器人执行。
3. **路径规划:** 每个机器人根据自身的初始位置与目标位置进行路径规划。
4. **状态同步:** 执行过程中,各个机器人通过ROS通信机制共享状态信息,确保协同工作的同步性。
5. **动态调整:** 在执行任务过程中,动态调整各个机器人的状态,以应对突发情况。
一个多机器人协同执行任务的伪代码示例:
```python
class MultiRobotTaskPlanner:
def __init__(self):
self.robots = ["robot1", "robot2"]
self.tasks = [] # 任务列表
def assign_tasks(self):
for robot in self.robots:
# 任务分配逻辑
pass
def synchronize_status(self):
# 状态同步逻辑
pass
def adjust_dynamically(self):
# 动态调整逻辑
pass
def execute(self):
self.assign_tasks()
self.synchronize_status()
while True:
self.adjust_dynamically()
# 检查所有任务是否已完成
if all(task.completed for task in self.tasks):
break
```
## 3.3 ROS的导航与定位
### 3.3.1 地图构建与SLAM技术
ROS中的SLAM(同时定位与地图构建)技术允许机器人在未知环境中探索并构建环境地图。SLAM算法有很多种类,常见的有Gmapping、Karto SLAM、RTAB-Map等。SLAM的实现需要集成传感器数据,并通过算法提取特征点、匹配历史位置来更新机器人的位置和地图。
在ROS中使用Gmapping进行SLAM的代码示例:
```python
#!/usr/bin/env python
import rospy
from nav_msgs.msg import OccupancyGrid
from nav_msgs.srv import GetMap
from nav_msgs.msg import MapMetaData
def map_callback(map):
print(map.info.width, map.info.height, map.info.resolution)
if __name__ == '__main__':
rospy.init_node('slam_test')
rospy.wait_for_service('/static_map') # 等待地图服务
try:
get_map = rospy.ServiceProxy('/static_map', GetMap)
map = get_map()
except rospy.ServiceException as e:
print("Service call failed: %s" % e)
rospy.Subscriber('/map', MapMetaData, map_callback)
rospy.spin()
```
### 3.3.2 路径规划与避障技术
路径规划是导航系统的关键部分,它涉及为机器人找到从起点到终点的最优路径。在ROS中,路径规划可以通过内置的导航堆栈来实现。导航堆栈利用Dijkstra算法或A*算法等经典图搜索算法进行路径规划,并能结合机器人的避障能力,规划出安全的路径。
ROS中的导航堆栈配置需要`move_base`节点,它结合全局路径规划器和局部避障器。配置好后,路径规划器将根据机器人的当前位置、目标位置和环境地图信息,计算出一条路径,并实时更新以避开障碍物。
一个简单的路径规划与避障的代码示例:
```python
#!/usr/bin/env python
import rospy
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
def send_goal(x, y):
move_base_goal = MoveBaseGoal()
move_base_goal.target_pose.header.frame_id = "map"
move_base_goal.target_pose.pose.position.x = x
move_base_goal.target_pose.pose.position.y = y
move_base_goal.target_pose.pose.orientation.w = 1.0
# 发送目标位置给move_base节点
move_base.sendGoal(move_base_goal)
# 等待移动完成
move_base.waitForResult()
if __name__ == '__main__':
rospy.init_node('move_base_test')
move_base = rospy.get_param("~move_base", "move_base")
rospy.sleep(1) # 等待move_base启动
send_goal(2.0, 1.0) # 发送目标位置到move_base
```
在ROS系统集成与实践中,如何将这些抽象的概念和工具与实际硬件和软件相结合,是实际应用中的关键。传感器的集成和执行器的控制策略为机器人的操作提供了基础。而在多机器人系统中,通信机制的构建与协同任务规划策略使得多个机器人能够有效地共同完成任务。导航与定位中地图构建与SLAM技术以及路径规划与避障技术的实施,使得机器人能够在复杂环境中实现自主导航和路径规划。
# 4. ROS高级主题与扩展
在ROS的发展历程中,高级主题与扩展是推动这一平台不断进步和适应现代需求的关键因素。从实时性能优化到人工智能的融合,再到云平台的部署与应用,这些高级主题不仅展现了ROS平台的灵活性,也为研究者和开发人员提供了更强大的工具来解决复杂问题。
## 4.1 ROS的实时性能优化
### 4.1.1 实时系统的需求分析
在工业、科研及航空航天等领域,实时性是衡量系统性能的关键指标。实时系统(Real-Time Systems, RTS)是指能够按照既定的时间要求完成任务的系统,它需要满足严格的时序约束。在ROS系统中,实时性能的优化尤为重要,尤其是对于那些需要精确控制时间的机器人应用。
实时性能涉及到任务调度、中断响应、数据处理等方面。在分析实时性能需求时,开发者需要考虑多个因素,比如任务的实时级别(硬实时、软实时)、系统的最大响应时间、任务的优先级等。只有充分理解这些需求,才能对ROS进行有效的实时性能优化。
### 4.1.2 ROS实时性能的提升策略
为了提升ROS的实时性能,可以采取以下策略:
1. 使用实时操作系统(RTOS):ROS允许运行在RTOS之上,这对于需要严格时间约束的应用非常关键。
2. 优化节点调度:通过调整节点优先级和任务调度策略,确保高优先级任务可以优先执行。
3. 减少消息通信延迟:使用可靠的消息传输机制减少通信延迟,例如使用共享内存、优化主题订阅模式。
4. 采用实时消息传递系统:如RT-Maude或ROS-Industrial实时扩展包,它们专门为实时性能进行了优化。
```mermaid
graph LR
A[ROS实时性能优化] --> B[使用RTOS]
A --> C[优化节点调度]
A --> D[减少消息通信延迟]
A --> E[采用实时消息传递系统]
```
实时性能优化不仅仅是一组技术手段的应用,更是一个系统工程,需要从设计、开发到测试各阶段综合考虑。通过上述策略的应用,可以将ROS部署到更加严苛的实时应用场景中。
## 4.2 ROS与人工智能的融合
### 4.2.1 机器学习在ROS中的应用
机器学习为ROS带来了智能化的新维度,使得机器人能够在复杂环境中自主学习和适应。ROS提供了机器学习库和接口,支持算法的集成,如TensorFlow、PyTorch等。利用这些库,开发者可以在ROS中构建复杂的机器学习应用。
在ROS中使用机器学习,一个典型的应用是通过视觉或语音信号训练模型进行物体识别和自然语言处理。这些模型可以集成在ROS节点中,通过订阅相应的主题接收数据,然后进行处理。
```mermaid
graph LR
A[机器学习在ROS中的应用] --> B[集成机器学习库]
A --> C[训练视觉/语音模型]
A --> D[节点订阅处理数据]
```
### 4.2.2 深度学习模型的集成与优化
深度学习模型由于其在图像识别、自然语言处理等方面的突出表现,正越来越多地被集成到ROS系统中。深度学习模型因其复杂性通常需要高性能的硬件支持,例如GPU或TPU。因此,深度学习模型的集成和优化需要考虑计算资源的分配以及效率。
在集成过程中,需要进行模型的裁剪和优化,以适应机器人搭载的计算资源。例如,可以使用TensorRT等工具对模型进行优化,压缩模型大小,降低计算延迟。集成后的模型将被加载到ROS节点中,处理来自传感器的实时数据流。
```mermaid
graph LR
A[深度学习模型的集成与优化] --> B[模型裁剪优化]
A --> C[适配计算资源]
A --> D[使用TensorRT优化]
A --> E[加载模型到ROS节点]
```
集成深度学习模型到ROS中,开发者可以利用ROS的强大通信机制,将处理后的数据用于机器人的决策过程。这一过程对于创建智能机器人系统至关重要,能够极大提升机器人的自主性和适应性。
## 4.3 ROS在云平台的部署与应用
### 4.3.1 云原生ROS的架构设计
随着云计算技术的发展,将ROS部署到云平台变得越来越常见。云原生ROS指的是将ROS系统构建为可以在云环境中高效运行的架构。这种架构设计使得开发者可以利用云资源的弹性和可扩展性,支持大规模的机器人应用。
云原生ROS架构设计的关键在于服务化,即将原本在本地运行的ROS节点、服务和参数服务器等组件,以微服务的形式部署到云平台上。这样可以实现资源的按需分配,同时利用云平台提供的负载均衡、容错等特性来保证应用的高可用性。
```mermaid
graph LR
A[云原生ROS的架构设计] --> B[服务化部署]
A --> C[资源按需分配]
A --> D[利用云特性保高可用性]
```
### 4.3.2 云服务在机器人操作系统中的作用与挑战
云平台为ROS系统提供了存储、计算和网络等基础设施,但同时带来了新的挑战。数据的传输延迟、安全性和隐私问题是部署在云平台上的ROS系统必须面对的挑战。
为了应对这些挑战,需要采取相应的技术措施。例如,可以使用边缘计算来减少数据在云与机器人之间的传输延迟;加强加密措施保证数据的安全性和隐私性。在架构设计时,也要充分考虑这些因素,以确保ROS系统的可靠性和可用性。
```mermaid
graph LR
A[云服务在机器人操作系统中的作用与挑战] --> B[减少数据传输延迟]
A --> C[加强加密保护]
A --> D[架构设计考虑因素]
```
云平台的部署为ROS提供了新的可能性,使得机器人可以随时随地接入强大的计算资源,扩展了ROS的应用场景。开发者可以利用云服务,为机器人系统提供更加强大和智能的功能。
通过本章的介绍,我们可以看到ROS正在不断扩展其技术边界,不仅在实时性能优化和人工智能融合方面取得了进展,还在云平台的部署与应用上展现了新的发展趋势。这些高级主题的深入解析,不仅为开发者提供了强大的工具和资源,也推动了机器人操作系统向更智能、更高效的未来发展。
# 5. ROS项目开发流程
## 5.1 ROS项目的规划与设计
### 5.1.1 需求分析与系统设计
在进入实际编码之前,对项目需求进行彻底的分析至关重要。这一阶段,团队需要了解项目的目标、功能、性能要求以及用户场景。需求分析通常包含与最终用户的讨论,以确保系统设计符合用户需求,并通过业务用例和故事板的形式进行文档化。
需求分析之后,接下来是系统设计。这涉及到决定使用哪些ROS包,确定节点的通信方式,设计数据流以及定义系统的软件架构。系统设计阶段的目标是创建一个清晰、可执行的项目蓝图,为接下来的开发提供方向。
### 5.1.2 项目管理方法与工具
有效的项目管理是确保项目按时、按预算和按质量要求完成的关键。在ROS项目中,使用敏捷方法(如Scrum)已被证明是非常有效的。敏捷方法鼓励小步快跑的开发模式,周期性地评估项目进展,以确保及时调整计划。
项目管理工具如Jira、Trello或ROSPlan可以帮助团队更好地组织任务、跟踪进度和管理迭代。在ROSPlan中,项目管理是通过规划问题、规划域以及规划领域文件来实现的,它支持规划和执行监控,并与ROS系统集成,允许自动化任务和监控项目状态。
## 5.2 ROS软件的开发与测试
### 5.2.1 版本控制在ROS开发中的应用
版本控制是软件开发不可或缺的一部分,特别是在团队协作项目中。它允许开发者跟踪代码变化,协作编辑,并轻松解决合并冲突。Git是最常用的版本控制工具,它支持分支管理、提交历史和回滚到之前的版本。
在ROS开发中,使用ROSjects和GitHub等工具可以创建和管理ROS包的版本。开发者可以利用catkin或colcon来构建ROS工作空间,并通过ROS的msg和srv文件集成版本控制。
### 5.2.2 单元测试、集成测试与持续集成
测试是确保软件质量的关键环节。ROS社区鼓励采用单元测试和集成测试来识别和修复问题。单元测试是针对ROS节点中的各个独立组件,确保它们按预期工作。集成测试则涉及到测试ROS系统中不同组件如何一起工作。
为了实现自动化测试,持续集成(CI)的概念被引入ROS项目开发中。利用像Jenkins这样的CI工具,可以自动运行测试,构建软件,并确保每次提交都符合预定的质量标准。CI工作流的配置通常包括在ROS包的CMakeLists.txt中指定构建和测试命令。
## 5.3 ROS项目的部署与维护
### 5.3.1 部署策略与自动化部署工具
部署是将ROS软件从开发环境迁移到生产环境的过程。为了简化和加速这一过程,应采用自动化部署工具。ROS部署策略包括使用Docker容器和Kubernetes,这可以确保在不同的环境中保持一致性,并简化软件生命周期管理。
例如,可以创建一个Dockerfile来定义ROS软件运行所需的环境,然后通过CI工具链自动化构建和推送容器镜像到Docker仓库。此外,使用Ansible或SaltStack等自动化部署工具,能够帮助团队在多个机器上快速部署ROS软件,减少手工操作带来的风险。
### 5.3.2 系统监控与性能调优
部署后,对系统进行监控和性能调优是确保系统长期稳定运行的重要环节。系统监控包括跟踪CPU和内存使用情况、消息队列的状态和系统服务的健康状况。开源工具如Grafana和Prometheus可用于收集和可视化监控数据,而ROS的rqt工具集提供了节点监控和性能分析的功能。
性能调优则需要根据监控数据,分析系统瓶颈,进行适当的代码优化或硬件升级。有时可能需要调整ROS节点的参数,比如提高消息频率或调整线程优先级等。代码优化可能涉及到算法改进、资源利用优化或代码重构,确保软件运行更加高效。
# 6. ROS社区与资源
## 6.1 ROS社区文化与贡献
### 6.1.1 ROS社区的组织结构
ROS社区拥有一个松散的组织结构,围绕着开源原则和分享精神展开。社区主要由以下几个部分组成:
- **核心开发者**: 负责维护ROS核心软件包,包括系统更新和错误修复。
- **贡献者**: 分布在世界各地的开发者,为ROS贡献代码、文档以及教程。
- **用户**: 使用ROS进行机器人开发的研究人员和工程师。
- **组织者**: 负责社区活动和会议,如ROSCon以及各种区域性会议和工作坊。
每个部分都在社区中扮演着自己的角色,相互协作,共同推动ROS的发展。
### 6.1.2 如何参与ROS社区的贡献与交流
参与ROS社区贡献与交流的路径多样:
- **提交问题和Pull Request**: 在GitHub上为ROS仓库报告问题或提交代码改进。
- **加入邮件列表**: 订阅ROS邮件列表,与其他开发者讨论问题、分享解决方案。
- **参与论坛**: ROS Answers提供了一个问答平台,可以提问或解答问题。
- **贡献文档和教程**: 帮助编写和改进ROS的官方文档和教程,这是新手开始贡献的常见方式。
- **参加ROSCon和其他会议**: 与社区成员面对面交流,分享你的项目和经验。
参与社区不仅能帮助他人,也能扩展你自己的技能和知识。
## 6.2 ROS的学习资源与案例研究
### 6.2.1 ROS官方文档与教程
ROS官方文档和教程是学习ROS不可或缺的资源。它们通常包括:
- **安装指南**: 指导用户如何安装ROS系统和相关软件包。
- **ROS Wiki**: 提供了大量的概念性文档,包括ROS基础、API参考和核心软件包的使用说明。
- **ROS Tutorials**: 提供了一系列入门教程,从安装到使用主题和节点等基本概念。
- **ROS Answers**: 提供实际问题的解答和讨论,是解决具体问题的宝贵资源。
通过官方文档和教程,学习者可以系统地掌握ROS的使用和应用。
### 6.2.2 典型应用案例的分析与讨论
ROS社区中有大量的成功案例,涵盖了从基础研究到工业应用的多个领域。分析这些案例可以帮助新手理解ROS在实际项目中的应用。例如:
- **自动化生产线**: 使用ROS进行机器人编程,以完成组装、检测等任务。
- **服务机器人**: 如酒店服务机器人,能够自主导航和完成简单的服务任务。
- **探索型机器人**: 用于深海、火星等极端环境探索的机器人,利用ROS进行通信和任务调度。
通过深入研究这些案例,可以发现ROS的潜力和挑战,激发新的创新思路。
## 6.3 ROS的未来趋势与挑战
### 6.3.1 新兴技术对ROS的影响
随着技术的发展,一些新兴技术已经开始影响ROS的进化:
- **边缘计算**: 随着数据处理向边缘设备转移,ROS需要适应轻量级部署和更优的资源利用。
- **人工智能**: AI模型的集成是大势所趋,深度学习等AI技术可以增强ROS的感知和决策能力。
- **多机器人系统**: 在多机器人协作和通信方面,ROS还需要进一步的标准化和优化。
ROS正在逐步整合这些技术,为未来的机器人应用铺平道路。
### 6.3.2 ROS面临的挑战与未来发展方向
ROS的未来发展面临着许多挑战:
- **实时性能**: 确保ROS能够满足实时性要求高的应用,如自动驾驶汽车。
- **可扩展性**: 保证ROS能在更大规模和更复杂的系统中保持高效和稳定。
- **用户友好性**: 提升易用性,降低学习曲线,吸引更多的非专业开发者。
为应对这些挑战,ROS社区正在积极开发新的工具和改进现有机制,以保持其在机器人技术领域的领导地位。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了机器人技术的各个方面,为读者提供了全面了解这一快速发展的领域的指南。从基础概念到先进应用,专栏涵盖了机器人技术101、编程语言、ROS操作系统、视觉系统、传感器融合、手臂控制、语音交互、ROS2、动力学建模、自主学习、路径规划、项目管理、故障诊断和工业自动化中的机器人技术等主题。通过深入浅出的讲解和实用技巧,专栏旨在帮助读者掌握机器人技术的核心原理,并将其应用于各种实际应用中。无论您是机器人技术的新手,还是经验丰富的专业人士,本专栏都将为您提供宝贵的见解和指导,助力您开启智能自动化之旅。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
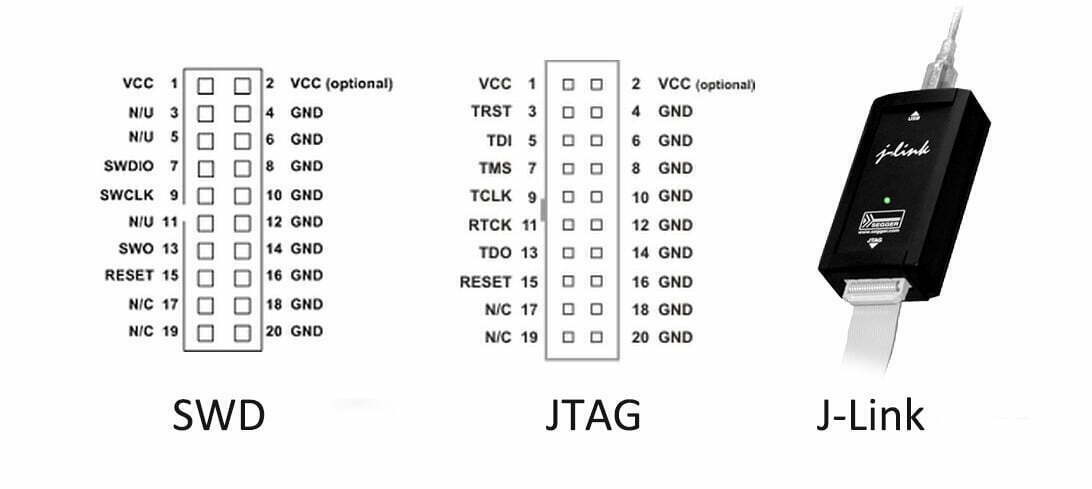
JLINK_V8固件烧录故障全解析:常见问题与快速解决
# 摘要
JLINK_V8作为一种常用的调试工具,其固件烧录过程对于嵌入式系统开发和维护至关重要。本文首先概述了JLINK_V8固件烧录的基础知识,包括工具的功能特点和安装配置流程。随后,文中详细阐述了烧录前的准备、具体步骤和烧录后的验证工作,以及在硬件连接、软件配置及烧录失败中可能遇到的常见问题和解决方案
【Jetson Nano 初识】:掌握边缘计算入门钥匙,开启新世界

# 摘要
本论文介绍了边缘计算的兴起与Jetson Nano这一设备的概况。通过对Jetson Nano的硬件架构进行深入分析,探讨了其核心组件、性能评估以及软硬件支持。同时,本文指导了如何搭建Jetson Nano的开发环境,并集成相关开发库与API。此外,还通过实际案例展示了Jetson Nano在边缘计算中的应用,包括实时图像和音频数
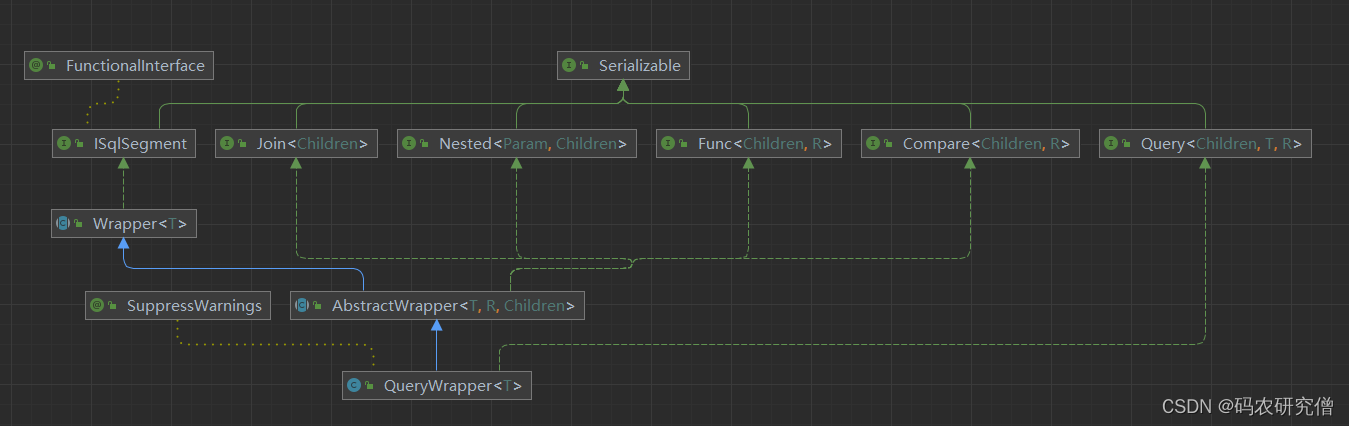
MyBatis-Plus QueryWrapper故障排除手册:解决常见查询问题的快速解决方案
# 摘要
MyBatis-Plus作为一款流行的持久层框架,其提供的QueryWrapper工具极大地简化了数据库查询操作的复杂性。本文首先介绍了MyBatis-Plus和QueryWrapper的基本概念,然后深入解析了QueryWrapper的构建过程、关键方法以及高级特性。接着,文章探讨了在实际应用中查询常见问题的诊断与解决策略,以及在复杂场
【深入分析】SAP BW4HANA数据整合:ETL过程优化策略

# 摘要
SAP BW4HANA作为企业数据仓库的更新迭代版本,提供了改进的数据整合能力,特别是在ETL(抽取、转换、加载)流程方面。本文首先概述了SAP BW4HANA数据整合的基础知识,接着深入探讨了其ETL架构的特点以及集成方法论。在实践技巧方面,本文讨论了数据抽取、转换和加载过程中的优化技术和高级处理方法,以及性能调优策略。文章还着重讲述了ETL过
电子时钟硬件选型精要:嵌入式系统设计要点(硬件配置秘诀)

# 摘要
本文对嵌入式系统与电子时钟的设计和开发进行了综合分析,重点关注核心处理器的选择与评估、时钟显示技术的比较与组件选择、以及输入输出接口与外围设备的集成。首先,概述了嵌入式系统的基本概念和电子时钟的结构特点。接着,对处理器性能指标进行了评估,讨论了功耗管理和扩展性对系统效能和稳定性的重要性。在时钟显示方面,对比了不同显示技术的优劣,并探讨了显示模块设计和电源管理的优化策略。最后,本
【STM8L151电源设计揭秘】:稳定供电的不传之秘

# 摘要
本文对STM8L151微控制器的电源设计进行了全面的探讨,从理论基础到实践应用,再到高级技巧和案例分析,逐步深入。首先概述了STM8L151微控制器的特点和电源需求,随后介绍了电源设计的基础理论,包括电源转换效率和噪声滤波,以及STM8L151的具体电源需求。实践部分详细探讨了适合STM8L151的低压供电解决方案、电源管理策略和外围电源设计。最后,提供了电源设计的高级技巧,包括
NI_Vision视觉软件安装与配置:新手也能一步步轻松入门

# 摘要
本文系统介绍NI_Vision视觉软件的安装、基础操作、高级功能应用、项目案例分析以及未来展望。第一章提供了软件的概述,第二章详细描述了软件的安装流程及其后的配置与验证方法。第三章则深入探讨了NI_Vision的基础操作指南,包括界面布局、图像采集与处理,以及实际应用的演练。第四章着重于高级功能实
【VMware Workstation克隆与快照高效指南】:备份恢复一步到位

# 摘要
VMware Workstation的克隆和快照功能是虚拟化技术中的关键组成部分,对于提高IT环境的备份、恢复和维护效率起着至关重要的作用。本文全面介绍了虚拟机克隆和快照的原理、操作步骤、管理和高级应用,同时探讨了克隆与快照技术在企业备份与恢复中的应用,并对如何
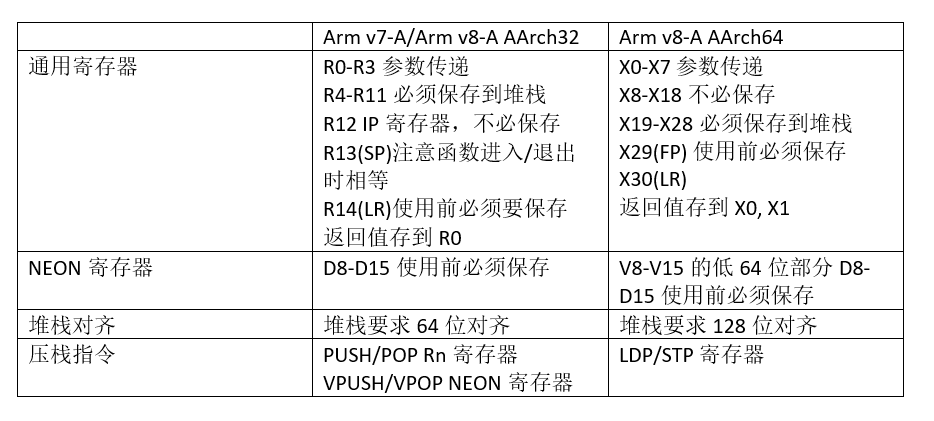
【Cortex R52 TRM文档解读】:探索技术参考手册的奥秘
# 摘要
本文深入探讨了Cortex R52处理器的各个方面,包括其硬件架构、指令集、调试机制、性能分析以及系统集成与优化。文章首先概述了Cortex R52处理器的特点,并解析了其硬件架构的核心设计理念与组件。接着,本文详细解释了处理器的执行模式,内存管理机制,以及指令集的基础和高级特性。在调试与性能分析方面,文章介绍了Cortex R52的调试机制、性能监控技术和测试策略。最后,本文探讨了Cortex R52与外部组件的集成,实时操作系统支持,以及在特定应
西门子G120变频器安装与调试:权威工程师教你如何快速上手

# 摘要
西门子G120变频器在工业自动化领域广泛应用,其性能的稳定性与可靠性对于提高工业生产效率至关重要。本文首先概述了西门子G120变频器的基本原理和主要组件,然后详细介绍了安装前的准备工作,包括环境评估、所需工具和物料的准备。接下来,本文指导了硬件的安装步骤,强调了安装过程中的安全措施,并提供硬件诊断与故障排除的方法。此外,本文阐述了软件配置与调试的流程,包括控制面板操作、参数设置、调试技巧以及性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )