RSLogix5000技巧揭秘:PIDE指令高级功能解析
发布时间: 2024-12-16 08:58:53 阅读量: 3 订阅数: 8 

RSLogix5000编程软件中PIDE指令的使用归纳.pdf

参考资源链接:[RSLogix5000中的PIDE指令详解:高级PID控制与操作模式](https://wenku.csdn.net/doc/6412b5febe7fbd1778d45211?spm=1055.2635.3001.10343)
# 1. RSLogix5000 PIDE指令概述
在工业自动化领域中,RSLogix 5000是一种广泛使用的编程工具,它允许工程师在Rockwell Automation的ControlLogix平台上编写、模拟和调试程序。PIDE指令,即“过程指令”或“过程工业指令”,是RSLogix 5000软件包中一个非常重要的功能块。PIDE指令的主要功能是处理工业过程的控制,如温度、压力、流量和液位等关键参数的控制。工程师使用PIDE指令能够实现更复杂的控制策略,提高过程控制的精确度和可靠性。
通过PIDE指令,工程师可以轻松集成PID控制算法,而无需深入复杂的算法编码。该指令不仅简化了传统PID控制的实现,还扩展了功能,包括先进控制策略和各种自动调整及优化功能。理解PIDE指令的基本概念,对于掌握更高级的过程控制技巧至关重要,它能帮助自动化专业人员更好地实现控制目标,优化生产流程,降低操作成本,从而提升整个系统的效率和质量。
# 2. PIDE指令的理论基础
## 2.1 PIDE指令的工作原理
### 2.1.1 PIDE指令的结构和组成
在深入探讨PIDE指令的工作原理之前,有必要先了解其结构和组成。PIDE,即比例-积分-微分-包络控制,是一种先进的控制算法,它将比例(P)、积分(I)、微分(D)三种控制规律与过程变量的包络功能相结合,提供更准确的过程控制。
PIDE指令主要由以下几部分构成:
- **输入参数**:包括过程变量(PV)、设定点(SP)、前馈输入(FF)等,这些输入是实现过程控制的基础。
- **输出参数**:输出到控制元件(如阀门)的指令值。
- **控制参数**:包括比例带宽、积分时间、微分时间、包络调整等,这些参数决定了控制的强度和响应速度。
- **状态变量**:记录控制指令的运行状态,如积分饱和状态、微分滞后状态等。
### 2.1.2 PIDE的参数解析与功能
PIDE指令的每个组成部分都具有特定的功能和作用,以下是各参数的详细解析:
- **比例(P)控制**:通过控制输出与误差值成比例来减少偏差,是实现快速响应的关键。
- **积分(I)控制**:消除静态偏差,确保过程变量长时间保持在设定点。
- **微分(D)控制**:根据误差的变化趋势预测未来的变化,提供必要的动态补偿。
- **包络(E)控制**:动态调整控制参数的限制,以适应不同的过程需求。
通过合理配置这些参数,PIDE可以适应各种复杂的过程控制需求,实现精细和稳定的控制效果。
## 2.2 PIDE指令在控制逻辑中的应用
### 2.2.1 控制逻辑设计原则
为了使PIDE指令发挥最大效用,设计控制逻辑时应遵循以下原则:
- **控制目标清晰**:首先明确控制目标,如控制温度、压力或流量等。
- **过程特性分析**:分析过程动态特性和可能的干扰,为参数配置提供依据。
- **安全与稳定性考虑**:确保控制逻辑中包含必要的安全特性,防止过程失控。
- **可维护性**:设计的逻辑应便于后期调试、维护和优化。
### 2.2.2 PIDE与其他控制指令的关联
PIDE指令通常与其他控制指令结合使用,以适应不同的控制需求:
- **与PID指令的比较**:PIDE相对于PID增加了包络功能,适用于过程变量变化较大的控制场合。
- **与序列控制的结合**:在复杂控制流程中,PIDE可作为序列控制的一个环节,与其他控制指令协同工作。
- **与先进控制策略的集成**:例如,与预测控制、自适应控制策略相结合,进一步提升控制效果。
通过合理配置PIDE指令及其与其他控制指令的关联,可以实现更高水平的过程控制性能。
# 3. PIDE指令高级功能详解
## 3.1 进程管理功能
### 3.1.1 进程故障检测与报警
PIDE指令不仅用于控制,更在故障检测与报警方面扮演着关键角色。通过实时监控控制过程,PIDE可以快速识别异常行为或不正常的状态。一旦检测到偏差超出预定的控制界限,PIDE可以自动触发报警,通知操作员采取措施,或者自动执行预设的纠正操作。
**故障检测**
PIDE通过持续比较目标值和实际输出来监控过程。当检测到过程偏差,PIDE将根据预设的报警条件(比如偏差大小、持续时间等)触发报警。这要求我们准确设定报警阈值,以便在关键的异常发生时能够及时响应。
**报警触发流程**
```mermaid
graph LR
A[开始] --> B{检测到偏差}
B -- 是 --> C[检查偏差是否超过阈值]
B -- 否 --> D[继续监控]
C -- 是 --> E[触发报警]
C -- 否 --> F[记录偏差]
E --> G[通知操作员]
F --> D
G --> H[等待响应]
```
**代码块示例**
```ladder
// Ladder Logic for PIDE Alarm Triggering
// [PIDE] - Process ID Control block
// [ALARM] - Alarm block to trigger upon PIDE fault detection
// PIDE Block Configuration
PIDE
.Target := MW100 // Target value
.ProcessValue := MW102 // Process value to be controlled
.TuneParams := MD100 // Tuning parameters
.Fault := M10.0 // Fault bit
.ControlOutput := MW104 // Control output value
;
// Alarm Triggering Logic
IF M10.0 THEN // If PIDE fault bit is set
ALARM
.Enable := TRUE
.Acknowledge := M10.1 // Acknowledge bit
.Status := M10.0 // Fault status from PIDE
END_IF
;
```
**参数说明**
- **PIDE**:负责处理PID控制的指令块。
- **Target**:期望的控制目标值。
- **ProcessValue**:实际过程值,与控制目标进行比较。
- **TuneParams**:包含PID参数的内存地址。
- **Fault**:故障指示位,当发生故障时置位。
- **ControlOutput**:PIDE的控制输出值。
- **ALARM**:报警块,当PIDE检测到故障时会被激活。
**逻辑分析**
在上述代码块中,当PIDE检测到过程值与目标值之间的偏差超过允许范围时,会设置故障位。此时,ALARM指令块被激活,操作员将接收到报警通知。为了防止误报,应进行仔细的系统测试和调整,以确定最合适的报警阈值。
### 3.1.2 进程控制与状态管理
PIDE在进程控制与状态管理方面提供了强大的工具,以帮助操作者有效管理复杂的工业过程。该功能使得操作者能够监控多个过程变量,并实时调整控制参数以保持系统的稳定运行。
**状态管理**
PIDE指令允许操作者为每个控制回路定义多个状态,如正常运行、手动控制、故障状态等。每个状态下,操作者可以配置不同的控制策略和报警逻辑。通过程序逻辑,PIDE可以实现平滑地在不同状态之间切换,保证了过程控制的连续性和稳定性。
**状态切换流程**
```mermaid
graph LR
A[开始] --> B{检查控制模式}
B -- 手动 --> C[手动控制状态]
B -- 自动 --> D[自动控制状态]
B -- 故障 --> E[故障状态]
C --> F[手动调整过程变量]
D --> G[自动控制回路]
E --> H[执行故障恢复程序]
```
**代码块示例**
```ladder
// Ladder Logic for PIDE Mode Switching
// [PIDE] - Process ID Control block
// [MODE] - Mode selection logic for process control
// Mode Selection
MODE
.ModeInput := I:0/01 // Input for mode selection
.NormalMode := I:0/02
.ManualMode := I:0/03
.FaultMode := I:0/04
;
// PIDE Mode Control
IF MODE.NormalMode THEN
// Normal automatic mode processing
PIDE
/
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 RSLogix5000 编程软件中 PIDE 指令的广泛应用和最佳实践。从基础概念到高级功能,该专栏涵盖了 PIDE 指令的方方面面,包括优化、故障诊断、响应性提升、复杂控制系统应用、调优实践和最佳应用。通过深入的案例研究、技巧解析和对比分析,该专栏为工程师提供了全面的指南,帮助他们充分利用 PIDE 指令,实现过程控制、自动化和精密控制任务的卓越性能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
ZEMAX zpl脚本构建:一步步教你如何打造首个脚本
# 摘要
ZEMAX ZPL脚本是用于光学设计和系统建模的专用语言。本文从基础入门讲起,逐步深入到ZPL脚本的语法和结构,以及变量和控制结构的使用。通过实践操作,本文指导用户如何应用ZPL脚本进行设计优化、系统建模分析以及数据可视化报告的生成。进一步,本文探讨了高级技巧,包括自定义函数、模块化编程、异常处理和脚本性能优化。在案例分析与实战演练章节中,本文通过实际案例展示了脚本的综合应用。最后,本文展望了ZPL脚本的未来技术趋势和社区资源分享的重要性,以期推动光学设计领域的发展。
# 关键字
ZEMAX;ZPL脚本;光学设计;系统建模;自动化脚本;性能优化
参考资源链接:[ZEMAX中ZPL
【Android SQLite并发控制】:多线程下的数据安全解决方案

# 摘要
随着移动应用的发展,SQLite数据库在Android平台上的并发控制成为优化应用性能和稳定性的重要议题。本文首先介绍了SQLite并发控制的基础知识和Android多线程编程的基础,接着深入探讨了SQLite并发控制机制中的事务机制、锁机制以及并发问题的诊断与处理。在实践应用章节中,本文提供了线程安全的数据访问模式,分析了高并发场景下的
模块化设计指南:TC8-WMShare对OPEN Alliance协议栈的影响详解

# 摘要
模块化设计是现代通信协议架构中提升系统可维护性、可扩展性和稳定性的关键技术。本文首先介绍了模块化设计的基本原理及其重要性,随后深入分析了TC8-WMShare协议的起源、架构以及与OPEN Alliance协议栈的关联。接着,本文探讨了模块化设计在TC8-WMShare协议中的具体实现和应用,以及它对OPE
【RT LAB高级特性】:详解如何优化你的仿真模型与系统
# 摘要
本文全面探讨了RT LAB仿真模型的基础知识、优化理论、高级应用、实践应用以及未来发展趋势。首先
【Silvaco TCAD核心解析】:3个步骤带你深入理解器件特性

# 摘要
Silvaco TCAD是半导体和电子领域中广泛使用的器件模拟软件,它能够模拟和分析从材料到器件的各种物理过程。本文介绍了TCAD的基本原理、模拟环境的搭建和配置,以及器件特性分析的方法。特别强调了如何使用TCAD进行高级应用技巧的掌握,以及在工业应用中如何通过TCAD对半导体制造工艺进行优化、新器件开发的支持和可靠性分析。此外,本文还探讨了TCAD未来发展
【开发者个性化设置】:Arduino IDE主题颜色设置的终极攻略
# 摘要
Arduino IDE作为一个广泛使用的集成开发环境,不仅为开发者提供了便利的编程工具,还支持个性化定制以满足不同用户的需求。本文首先概览了Arduino IDE的功能与用户个性化需求,随后深入探讨了主题颜色设置的理论基础、技术原理及个性化定制的方法。文章详细介绍了如何使用主题颜色编辑器进行内置主题的访问、修改和自定义主题的创建。
【S7-1200与MCGS数据交换秘籍】:交互机制全面解读(数字型、推荐词汇、实用型、私密性)
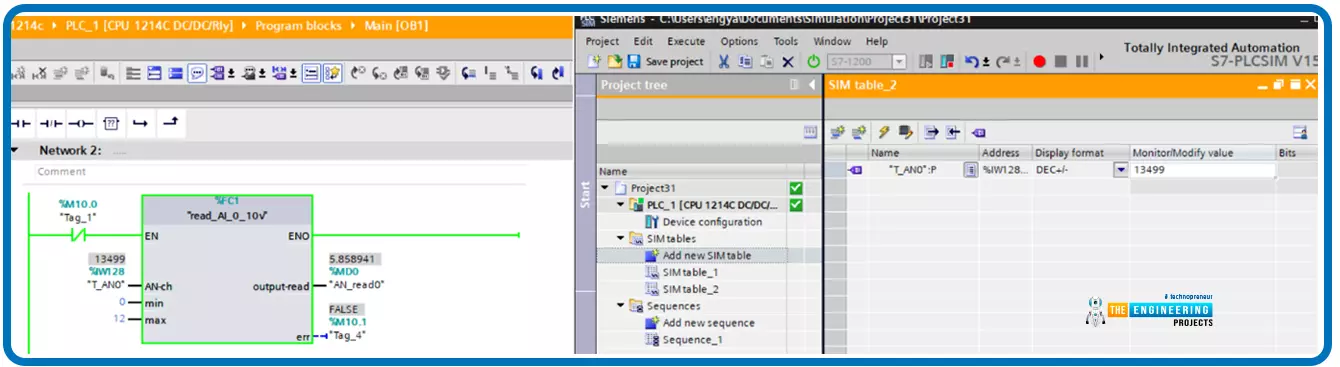
# 摘要
本文深入探讨了S7-1200 PLC与MCGS组态软件之间的数据交换机制。首先介绍S7-1200 PLC和MCGS组态软件的基础知识,接着详细论述数字型数据交换的理论基础和实践操作。本文进一步探讨了深度数据交换中的高级处理技巧、安全性和异常处理方法,并通过实战项目案例来
WinCC变量管理:一步提升效率的批量操作技术

# 摘要
本文全面概述了WinCC变量管理的各个方面,从基本操作到高级技术应用,再到实践案例与扩展应用,最后探讨了未来技术趋势。文章首先介绍了WinCC变量管理的基本概念,详细说明了变量的创建、编辑、批量操作和组织管理。接着,深入探讨了高级技术应用,如动态链接、性能优化和安全性管理。实践案例章节通过真实案例分析,展示了变量管理在工程实践中的应用,以及如何自动化批量操作和解决常见问题。最后,本文展望了WinCC变量管理技术的未来,探讨了新技
Fluent Scheme vs SQL:大数据处理中的关键对比分析

# 摘要
随着大数据技术的快速发展,高效的处理和分析技术变得至关重要。本文首先概述了大数据处理的背景,然后详细分析了Fluent Scheme语言的核心特性和高级特性,包括其数据流处理、嵌入式查询转换和并行处理机制,及其性能优化方法。同时,本文也探讨了SQL语言的基础、在大数据环境中的应用及其性能优化策略。文章进一步对比了Flu
DIP2.0与医疗数据隐私:探讨新标准下的安全与隐私保护
# 摘要
随着数字化医疗的兴起,医疗数据隐私保护变得日益重要。DIP2.0标准旨在提供一种全面的医疗数据隐私保护框架,不仅涉及敏感医疗信息的加密和匿名化,还包括访问控制、身份验证和数据生命周期管理等机制。本文探讨了DIP2.0标准的理论基础、实践应用以及面临的挑战,并分析了匿名化数据在临床研究中的应用和安全处理策
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )