YOLOv8与传统检测算法对决:深入了解YOLOv8的优势与局限
发布时间: 2024-12-11 21:15:54 阅读量: 15 订阅数: 16 

yolov8-使用yolov8实现行人检测算法-优质项目.zip
# 1. 深度学习目标检测概述
## 1.1 目标检测的重要性
深度学习在目标检测领域取得了显著成就,它利用先进的神经网络来识别图像中的对象并定位它们的位置。目标检测广泛应用于安防监控、自动驾驶、医疗图像分析等行业中,其准确性与速度直接影响产品和服务的质量。
## 1.2 从传统方法到深度学习
在深度学习出现之前,目标检测依赖手工特征提取和分类器。这些方法如HOG+SVM、背景减除等,虽有一定效果,但对环境变化和场景复杂度的适应性有限。深度学习的卷积神经网络(CNN)改变了这一现状,使得目标检测可以自动学习特征,极大地提高了检测的准确性。
## 1.3 深度学习目标检测的发展
随着深度学习技术的发展,目标检测算法经历了从R-CNN系列到YOLO系列的演变。这些算法不断改进,优化了检测速度和准确率的平衡,为不同的应用场景提供了多样化的解决方案。而YOLOv8作为最新一代的算法,继承并发展了这些优点,旨在满足更广泛的实时目标检测需求。
# 2. YOLOv8的理论基础
## 2.1 YOLO系列算法的演进
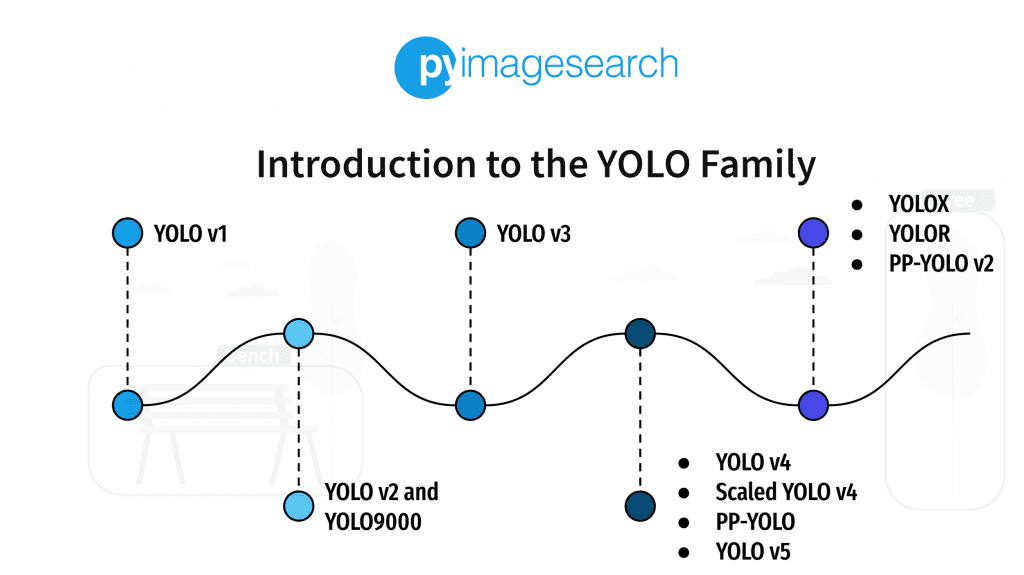
### 2.1.1 YOLO算法的发展历程
YOLO(You Only Look Once)算法自提出以来,以其快速准确的检测特性在目标检测领域占据了重要地位。YOLOv1在2015年首次发布,它将目标检测任务看作一个回归问题,将图像分割成一个个格子,每个格子负责预测边界框和类别概率。YOLOv2在2016年发布,它提高了定位精度,引入了锚框(anchor boxes)的概念,并优化了网络结构。YOLOv3在2018年发布,改进了对小物体的检测能力,引入了多尺度预测。YOLOv4在2020年发布,它集成了多种改进策略,如Mish激活函数、自对抗训练等,进一步提升了模型性能。
YOLOv5于2020年问世,以其简洁的架构和高效的训练速度受到了社区的青睐。到了2023年,YOLOv8的发布标志着该系列算法的最新进展,它在保持速度优势的基础上,进一步提升了检测的准确性和通用性。YOLOv8在多个方面做出了优化,包括但不限于网络结构的改进、损失函数的调整、以及训练技巧的增强。
### 2.1.2 YOLOv8相较于前代的关键改进
YOLOv8的关键改进主要集中在以下几个方面:
- **网络结构优化:** YOLOv8通过设计更深或更宽的网络,或引入注意力机制,来增强模型的特征提取能力。
- **损失函数创新:** YOLOv8对损失函数进行了调整,通过更精准的权重分配和损失项设计,改进了模型对于不同尺度物体和类别不平衡问题的处理。
- **数据增强和训练技巧:** YOLOv8采用了先进的数据增强技术和训练策略,例如自监督学习、半监督学习等,以此提高模型的泛化能力。
- **轻量化和压缩:** 为适应边缘计算等场景,YOLOv8在保证精度的前提下对模型进行轻量化,以减少计算量和内存占用。
## 2.2 YOLOv8的架构解析
### 2.2.1 YOLOv8的网络结构特点
YOLOv8的网络结构延续了YOLO系列算法简洁高效的设计理念,但相较于YOLOv5,在网络深度和宽度上有了显著增加。YOLOv8采用了CSPNet架构,该架构将特征传递分为两个路径,一个是常规的特征提取路径,另一个是通过跳过连接的快速路径。此外,YOLOv8利用了最近的注意力机制,如Swin Transformer的自注意力模块,来增强模型对于上下文信息的理解。
YOLOv8引入了多尺度特征融合策略,通过拼接不同层的特征图,使得模型能够在单一的检测头中同时检测大物体和小物体。同时,YOLOv8在损失函数的设计上也进行了改进,引入了针对不同尺度和类别的权重调整,以及对于边界框回归损失和置信度损失的平衡。
### 2.2.2 损失函数和优化策略
损失函数在YOLOv8中被精心设计以平衡检测任务中的不同目标,包括定位精度、分类精度和背景误检。具体来说,损失函数由三部分组成:位置损失(Localization Loss)、置信度损失(Confidence Loss)和分类损失(Classification Loss)。
位置损失使用的是IOU(Intersection over Union)损失,它强调了预测框与真实框的重叠度。置信度损失则结合了对象性置信度(objectness confidence)和类别置信度,用以区分有物体与无物体的情况,以及物体的类别。分类损失则使用交叉熵损失函数,它对类别的预测概率进行优化。
在优化策略方面,YOLOv8采用了多种技术,如学习率预热(warm-up)、学习率衰减策略、动量更新等,来提高模型训练的稳定性和收敛速度。此外,YOLOv8还引入了批量归一化(Batch Normalization)和dropout来防止过拟合。
## 2.3 YOLOv8的性能评估指标
### 2.3.1 准确性与速度的权衡
YOLOv8的目标是在保证实时性能的前提下,尽可能地提高检测的准确性。准确性通常使用mAP(mean Average Precision)指标来评估,而速度则使用FPS(Frames Per Second)来衡量。mAP是目标检测中最为常用的指标,它考虑了检测框的精确度和置信度。YOLOv8在提升mAP的同时,通过优化网络结构和训练策略,保持了较高的FPS。
为了在不同硬件平台上都能获得良好的性能,YOLOv8提供了多种模型版本,用户可以根据计算资源和需求选择合适的版本。例如,YOLOv8 Nano版本经过专门设计,能够在低端硬件上实现接近实时的检测速度,而YOLOv8 Large版本则针对计算能力更强的设备,在保证高准确率的同时,也能维持较高速度。
### 2.3.2 对比不同硬件平台的适应性
YOLOv8在设计时充分考虑了不同硬件平台的适应性。在CPU、GPU、NPU(Neural Processing Unit)、FPGA等不同的硬件上,YOLOv8都表现出了良好的性能。
- **CPU**:YOLOv8通过算法优化和模型压缩,使得在CPU上运行时,能够达到合理的检测速度。
- **GPU**:在GPU上,YOLOv8能够利用并行计算的优势,以接近实时的速度执行目标检测任务。
- **NPU/FPGA**:针对神经网络加速器,YOLOv8通过量化和剪枝技术进行了优化,降低了计算资源的需求,使其在边缘设备上也能快速运行。
性能评估不仅关注模型在标准数据集上的表现,还涉及在实际应用场景中的效果。比如,对于车载摄像头、安防监控、机器人导航等应用场景,YOLOv8都被设计成能够满足其特定性能需求。下一章节将通过对比实验来深入了解YOLOv8的性能优势。
# 3

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏旨在全面提升 YOLOv8 模型的精度。从基础到高级技巧,涵盖模型调优、训练策略、正则化技术、迁移学习、模型评估、超参数调优、后处理技巧和自定义数据集训练。通过这些实用技巧,读者可以一步到位掌握提升 YOLOv8 模型精度的方法,包括防止过拟合、提高泛化能力、优化训练速度、提升检测准确性等。此外,专栏还对比了 YOLOv8 与传统检测算法的优势和局限,帮助读者深入了解 YOLOv8 的特点。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
GT-POWER网格划分技术提升:模型精度与计算效率的双重突破

参考资源链接:[GT-POWER基础培训手册](https://wenku.csdn.net/doc/64a2bf007ad1c22e79951b5
【MAC版SAP GUI快捷键大全】:提升工作效率的黄金操作秘籍

参考资源链接:[MAC版SAP GUI快速安装与配置指南](https://wenku.csdn.net/doc/6412b761be7fbd1778d4a168?spm=1055.2635.3001.10343)
# 1. MAC版SAP GUI简介与安装
## 简介
SAP GUI(Graphical User Interface)是访问SAP系统
【隧道设计必修课】:FLAC3D网格划分与本构模型选择实用技巧
参考资源链接:[FLac3D计算隧道作业](https://wenku.csdn.net/doc/6412b770be7fbd1778d4a4c3?spm=1055.2635.3001.10343)
# 1. FLAC3D简介与应用基础
在本章中,我们将为您介绍FLAC3D(Fast Lagrangian Analysis of Continua in 3 Dimensions)的基础知识以及如何在工程
【故障诊断】:扭矩控制常见问题的西门子1200V90解决方案

参考资源链接:[西门子V90PN伺服驱动参数读写教程](https://wenku.csdn.net/doc/6412b76abe7fbd1778d4a36a?spm=1055.2635.3001.10343)
# 1. 扭矩控制概念与西门子1200V90介绍
在自动化与精密工程领域中,扭矩控制是实现设备精确
【Android设备安全必备】:Unknown PIN问题的彻底解决方案
参考资源链接:[unknow PIn解决方案](https://wenku.csdn.net/doc/6412b731be7fbd1778d496d4?spm=1055.2635.3001.10343)
# 1. Unknown PIN问题概述
## 1.1 问题的定义与重要性
Unknown PIN问题通常指用户在忘记或错误输入设备_PIN码后,导致设备锁定,无
【启动速度翻倍】:提升Java EXE应用性能的10大技巧
参考资源链接:[Launch4j教程:JAR转EXE全攻略](https://wenku.csdn.net/doc/6401aca7cce7214c316eca53?spm=1055.2635.3001.10343)
# 1. Java EXE应用性能概述
Java作为广泛使用的编程语言,其应用程序的性能直接影响用户体验和系统的稳定性。Java EXE应用是指那些通过特定打包工具(如Launc
Python Requests高级技巧大揭秘:动态请求头与Cookies管理

参考资源链接:[python requests官方中文文档( 高级用法 Requests 2.18.1 文档 )](https://wenku.csdn.net/doc/646c55d4543f844488d076df?spm=1055.2635.3001.10343)
# 1. 动态请求头与Cookies管理基础
## 1.1 互联网通信
iOS实时视频流传输秘籍:构建无延迟的直播系统
参考资源链接:[iOS平台视频监控软件设计与实现——基于rtsp ffmpeg](https://wenku.csdn.net/doc/4tm4tt24ck?spm=1055.2635.3001.10343)
# 1. 实时视频流传输基础
## 1.1 视频流传输的核心概念
- 视频流传输是构建实时直播系统的核心技术之一,涉及到对视频数据的捕捉、压缩、传输和解码等环节。掌握这些基本概念对于实现高质量
【绘制软件大比拼】:AutoCAD与其它工具在平断面图中的真实对决

参考资源链接:[输电线路设计必备:平断面图详解与应用](https://wenku.csdn.net/doc/6dfbvqeah6?spm=1055.2635.3001.10343)
# 1. 绘制软件大比拼概览
绘制软件领域竞争激烈,为满足不同用户的需求,各种工具应运而生。本章将为读者提供一个概览,介绍市场上流行的几款绘制软件及其主要功能,帮助您快速了解每款软件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )