【HyperMesh入门至精通】:掌握这些技巧,提升仿真实效与效率
发布时间: 2024-12-14 17:35:35 阅读量: 6 订阅数: 12 

参考资源链接:[Altair Hypermesh中文指南:从入门到精通](https://wenku.csdn.net/doc/1yo43fjxhh?spm=1055.2635.3001.10343)
# 1. HyperMesh简介及基础操作
## 1.1 HyperMesh概述
HyperMesh是领先的CAE前处理软件,被广泛应用于汽车、航空航天、船舶制造等行业。其强大网格划分功能,高效的用户界面,使得它成为行业标准的CAE前处理工具。用户可借助HyperMesh创建高质量的有限元模型,并与多种求解器进行有效集成。
## 1.2 安装与启动
在安装HyperMesh之前,确保系统满足软件运行的硬件需求。安装完成后,在操作系统中找到HyperMesh的快捷方式或通过命令行启动软件。初始界面会提示用户设置许可证,之后即可进入主界面。
## 1.3 基础操作流程
- **启动**:点击启动图标或命令行输入 `hm`。
- **界面布局**:认识并适应HyperMesh的用户界面布局,主要包括Model Browser、1D/2D/3D Elements、LoadCollector等模块。
- **导入模型**:使用File菜单下的Import选项导入CAD模型,支持多种CAD格式。
- **基本编辑**:利用工具栏中的图标进行节点和单元的选择、删除等基础编辑操作。
- **导出网格**:完成模型的网格划分后,通过File菜单下的Export选项导出网格文件,为后续分析作准备。
通过上述流程,我们可以完成从HyperMesh的启动到初步编辑CAD模型的基础操作。随后,我们将深入了解网格划分的细节和技巧。
# 2. 网格划分的理论与技巧
## 2.1 网格类型与特性
### 2.1.1 一维、二维与三维网格的区别与应用
在有限元分析中,网格是构成模型的最基本单元,它们定义了仿真的精度和计算的规模。一维、二维与三维网格是根据其几何维度进行分类的,每种类型都适用于不同的分析类型和场景。
- **一维网格**通常用于线性结构,如梁、杆和拉索等。它们计算量小,可以快速得到结果,常用于初步分析和结构简化模型中。
- **二维网格**适用于板、壳结构的分析,能够较好地模拟平面应力或平面应变状态。在汽车覆盖件、航空航天部件等平板结构的分析中十分常见。
- **三维网格**是用于模拟三维实体结构的,提供了全面的几何和物理建模能力。它们适用于复杂结构和系统级的全面分析。
在实际应用中,一维、二维、三维网格可以组合使用,形成所谓的“混合网格”。这种组合方式能够适应模型中不同区域的不同需求,例如在局部需要高精度的区域使用细密的三维网格,而在对结果影响不大的区域使用粗略的一维或二维网格。
### 2.1.2 网格密度对仿真实效的影响
网格密度直接影响仿真的精度和计算成本。在HyperMesh中,网格密度的控制需要考虑以下因素:
- **区域的应力集中**:在应力集中的区域,如几何突变、孔洞、缺口处,需要加密网格以捕获更精细的应力分布。
- **材料和结构的非线性行为**:对于材料非线性或者结构非线性区域,更细的网格有助于提高求解器的收敛性和计算精度。
- **网格类型的选择**:不同的网格类型对于特定问题有不同的适应性。例如,曲面区域使用三角形网格比四边形网格更能够适应复杂的形状变化。
- **求解器的计算能力**:高密度网格虽然可以提供高精度的结果,但同时也会导致计算时间增加。因此,需要根据可用的计算资源和求解时间限制来平衡网格密度。
一般情况下,初始模型设计时采用较低密度的网格进行初步分析,之后根据分析结果,逐步细化关键区域的网格密度。通过这种迭代方法,既能够保证分析的精度,又能有效控制计算成本。
## 2.2 网格划分方法
### 2.2.1 手动网格划分的流程与技巧
手动网格划分是根据分析需求,工程师逐个创建单元的过程。这种方法虽耗时,但具有高度的可控性和精确性。手动网格划分的一般流程包括:
1. **准备工作**:在划分网格前,要对分析模型进行预处理,如去除小特征、修正拓扑结构等,以提高网格划分的效率和质量。
2. **选择合适的单元类型**:根据分析类型和需要,选择合适的单元类型(如四边形单元、三角形单元等)。
3. **设置节点**:按照预期的网格大小和分布,创建关键区域的节点。这些节点可以是关键特征点,也可以是按照一定规律布置的中间节点。
4. **生成单元**:使用节点创建单元,这个过程中可能会需要进行多次编辑和调整以确保单元质量。
5. **局部细化和优化**:对于需要特别关注的区域,可以手动细化网格,并通过网格质量检查工具进行优化,如调整节点位置、改变单元形状等。
手动网格划分的关键技巧包括:
- **有效利用对称性**:对于具有明显对称性的模型,只划分对称部分,并在后续的分析中应用对称边界条件。
- **建立网格模板**:对于重复性高的几何形状或分析类型,可以创建网格模板,然后应用到相似的区域中,以减少重复工作量。
- **分区域划分网格**:先从大的、规则的区域开始划分,然后再处理复杂的、小的区域。
手动网格划分虽然耗时,但可以在复杂的关键区域获得高质量的网格,对于工程结构的细节分析和优化至关重要。
### 2.2.2 自动网格划分的优缺点及适用场景
自动网格划分允许工程师通过设置参数,利用算法快速生成网格。它的主要优点包括:
- **高效率**:大大减少了工程师手动划分网格的时间,尤其适用于复杂模型和大型结构。
- **可重复性**:在模型结构不变的情况下,自动网格划分过程可以快速重复,有助于快速迭代设计。
- **一致性**:自动网格生成工具保证了网格的一致性和规则性,减少了网格错误。
然而,自动网格划分也存在一些不足之处:
- **控制性差**:工程师对网格的具体布局控制较少,难以针对特定区域做出优化。
- **质量不均**:生成的网格质量可能会因模型的不同区域而有所不同,特别是在复杂的几何结构和边界附近。
自动网格划分适用的场景包括:
- **初步分析**:在设计初期,可以使用自动网格划分快速获取结果,以便快速评估设计方案。
- **大规模模型**:对于大型结构或网格数量庞大的模型,自动网格划分可以显著缩短网格生成时间。
- **规则结构**:在模型具有较多规则几何形状时,自动网格划分通常可以生成质量较高的网格。
自动网格划分通常作为初步的网格生成手段,后续可能需要结合手动调整以满足特定的分析需求。通过HyperMesh,工程师可以将自动和手动网格划分结合起来,既保证了网格划分的高效性,也保证了分析的精度。
### 2.2.3 网格质量检验与优化
网格质量直接影响仿真的准确性及稳定性。因此,划分网格后,需要对网格进行严格的检验和优化。以下是一些常用的检验标准和优化方法:
- **网格尺寸**:检查网格尺寸是否符合模型的特征和分析需求,确保没有异常大的或过小的单元。
- **单元形状**:检查单元是否变形过度。例如,在四边形单元中,检查角度是否在合理的范围内。
- **网格连通性**:确保网格单元之间正确连接,没有悬挂节点或重叠单元。
- **网格一致性**:如果模型中使用了不同的网格类型,需要确保它们之间的过渡平滑,避免突变。
优化的方法通常包括:
- **节点移动**:通过移动节点来调整单元的形状和尺寸,改善网格质量。
- **节点合并**:在不影响模型拓扑结构的前提下,合并过于靠近的节点。
- **网格重划分**:对于质量较差的区域,通过重新划分来生成更好的网格。
在HyperMesh中,提供了强大的网格质量检验工具,如Mesh Quality Check和Diagnostic Tool,可以迅速识别并处理这些问题。
## 2.3 网格编辑技巧
### 2.3.1 常用的网格编辑工具和操作
在网格生成后,往往需要通过一系列编辑操作来优化网格布局。HyperMesh提供了丰富的网格编辑工具:
- **Element Editor**:可以修改单元属性、材料属性、边界条件等,非常适合于对特定类型单元进行批量修改。
- **Node Editor**:用于修改节点的坐标值,可以进行节点的移动、旋转或缩放操作。
- **Elem Edit Tool**:提供了快速编辑单个或多个单元的功能,如删除、旋转、镜像等。
- **Connectivity**:用于检查和修改单元之间的连通性,解决悬挂节点等问题。
网格编辑的一些常见操作包括:
- **局部细化**:在关键区域增加网格密度,以提高局部的仿真精度。
- **网格合并和分割**:根据需要合并单元或分割单元,以优化网格布局。
- **网格移动和旋转**:调整网格的相对位置和方向,以匹配实际的边界条件和载荷施加。
- **网格平滑**:在不显著改变单元形状的前提下,平滑网格,提高网格的整体质量。
### 2.3.2 处理网格错误和警告的方法
在网格划分和编辑过程中,经常会产生一些错误和警告。这些错误和警告可能会影响仿真结果的准确性和可靠性。因此,及时识别和处理这些问题至关重要。
- **错误处理**:错误通常表示网格无法被求解器接受,需要及时修正。例如,节点重叠错误需要通过移动节点来消除重叠。
- **警告分析**:警告可能不会阻止求解器运行,但可能影响仿真结果的准确度。例如,过于扭曲的单元会导致应力集中,可能需要通过调整节点位置来优化单元形状。
HyperMesh提供了Error Check和Warning Check工具,能够帮助工程师迅速定位和分析网格中的错误和警告,以便进行有效处理。
```mermaid
graph LR
A[网格划分完成后] --> B[使用Error Check检测错误]
B --> C[使用Warning Check分析警告]
C --> D[根据提示进行错误和警告处理]
D --> E[优化网格质量]
E --> F[重新进行网格质量检验]
F --> |无错误和警告| G[网格准备就绪]
G --> H[进行仿真分析]
```
通过上述网格编辑和检验流程,可以确保网格质量满足仿真分析的要求,从而获得可靠的分析结果。
# 3. 材料属性与边界条件设定
在进行结构分析之前,正确地设定材料属性和边界条件是至关重要的。这不仅能够保证仿真的真实性,还能够确保分析结果的准确性和可靠性。本章节将深入探讨在HyperMesh中如何有效地定义材料属性、施加边界条件以及进行联合仿真设置。
## 3.1 材料模型与参数输入
### 3.1.1 不同材料模型的选择依据
在仿真分析中,选择合适的材料模型是至关重要的。材料模型需要能够反映材料在不同工况下的行为特性。例如,对于金属材料,我们可以使用弹塑性模型来模拟材料在达到屈服点后的行为;对于复合材料,需要使用正交各向异性模型来考虑材料在不同方向上的不同力学行为。
在选择材料模型时,我们需要考虑以下因素:
- 材料类型:不同的材料类型决定了其本构关系,如金属、塑料、橡胶、复合材料等。
- 工作环境:工作温度、压力、湿度等环境因素也会影响材料属性。
- 加载情况:需要明确是静态加载还是动态加载,是线性还是非线性分析。
- 精度要求:根据分析的精度要求选择合适的模型。
### 3.1.2 实际应用中的材料参数设定
在确定材料模型之后,我们需要根据实际材料的特性输入相应的参数。例如,对于线性弹性材料模型,我们需要定义杨氏模量和泊松比。对于塑性材料,还需要定义屈服应力和硬化曲线等。
材料参数的设定通常包括以下步骤:
1. 材料数据库的选择:HyperMesh 提供了一个材料数据库,用户可以选择或编辑现有材料的参数。
2. 参数的输入与调整:根据需要输入相应的材料参数,并根据实验数据或标准规范进行调整。
3. 参数的验证:通过与实验数据比较,验证材料参数设置的正确性。
## 3.2 边界条件与载荷的施加
### 3.2.1 边界条件的类型与实际应用
边界条件定义了结构在分析过程中的约束,如固定约束、铰接约束、滑动接触等。选择合适的边界条件可以模拟结构在实际工作中的约束情况。
常见的边界条件类型有:
- 固定约束(Fixed Support):限制所有自由度。
- 滑动约束(Sliding Support):允许沿某一方向移动,但不允许旋转。
- 弹簧/阻尼器边界(Spring/Damper Boundary):模拟弹性支撑或阻尼作用。
在选择边界条件时,需要根据结构的实际工作环境和受力情况来确定。
### 3.2.2 载荷类型及施加技巧
载荷的施加是仿真分析中的另一个关键步骤。载荷可以是力、压力、温度、重力加速度等多种形式。正确的载荷施加是确保仿真结果与实际相符的前提。
载荷的类型包括:
- 集中载荷:作用在结构上的一个点或有限区域的载荷。
- 均布载荷:在一定区域内均匀分布的载荷。
- 体积载荷:作用在整个结构体积上的载荷,如重力加速度。
在HyperMesh中施加载荷的技巧:
1. 准确地定位载荷施加的位置。
2. 确定载荷的大小、方向和分布形式。
3. 在必要时对载荷进行组合和简化处理。
### 3.2.3 载荷和边界条件的校验流程
施加完毕后,需要进行校验流程,确保载荷和边界条件符合实际工作情况。这一步骤可以通过以下几个方面进行:
- 对比分析:检查施加的载荷和边界条件是否与设计意图一致。
- 灵敏度分析:研究载荷和边界条件变化对仿真结果的影响。
- 验证仿真:将仿真结果与实验数据或其他已验证的结果进行对比。
## 3.3 联合仿真设置
### 3.3.1 热力学与结构力学的仿真联合
在实际工程应用中,结构往往会受到温度变化的影响,因此进行热力学与结构力学的联合仿真变得非常必要。联合仿真可以评估结构在受热过程中的应力和变形。
热结构耦合分析的步骤通常包括:
1. 热分析:先进行热分析,确定温度分布。
2. 结构分析:使用热分析结果作为结构分析的输入条件。
3. 结果评估:分析温度变化对结构性能的影响。
### 3.3.2 流体与结构的相互作用仿真
流体与结构相互作用(Fluid-Structure Interaction, FSI)仿真允许我们评估结构在流体作用下的性能,比如在风载或水流作用下的变形和应力分布。
进行FSI仿真的步骤有:
1. 流体域建模:首先建立流体域模型。
2. 结构域建模:接着建立结构域模型。
3. FSI界面定义:定义流体与结构之间的相互作用界面。
4. 计算与评估:进行计算并评估分析结果。
在下一章节中,我们将进一步探讨HyperMesh的高级应用,包括用户子程序和宏的应用、参数化建模以及优化流程和脚本自动化等内容。
# 4. HyperMesh高级应用
## 4.1 用户子程序与宏的应用
### 4.1.1 用户子程序的编写与集成
用户子程序(User Subroutines)是有限元分析软件中非常强大的功能,允许用户根据特定需求编写自定义的代码来扩展软件的功能。在HyperMesh中,用户可以通过Fortran或C语言编写子程序,以实现材料模型的自定义、边界条件的动态计算、输出结果的特殊处理等复杂操作。
子程序的编写需要对相关程序设计语言有深入了解,并且熟悉HyperMesh的API接口。在编写时,用户需要明确子程序的接口定义,这些定义由HyperMesh软件提供,用户需要按照这个接口标准来编写子程序,以确保子程序能够被正确识别和执行。
集成子程序到HyperMesh模型中,通常需要通过模板文件(如`.f`或`.c`文件)进行。在HyperMesh中,用户可以通过"User Profiles"来设置和管理这些子程序,选择合适的子程序模板文件,并在求解器配置中指定子程序文件的路径。
```fortran
SUBROUTINE CUSTOM MATERIAL LAW
C
C User material subroutine example.
C
INCLUDE 'ABA_PARAM.INC'
DOUBLE PRECISION STRESS(6), STRAN(6)
DOUBLE PRECISION TIME(2), DTIME, TEMP, PREDEF, DPRED, COORDS(3)
DOUBLE PRECISION DDSDDE(6,6), SSE, SPD, SCD
DOUBLE PRECISION RPL, DDSDDT(6,6), DRPLDE(6,6)
DOUBLE PRECISION DRPLDT, STRANL(6), DFGRD0(3,3), DFGRD1(3,3)
DOUBLE PRECISION NOEL, NPT, LAYER, KSPT, KSTEP, KINC
CHARACTER*80 PARAMS(1)
CHARACTER*3 PROGNAME
EQUIVALENCE (TIME(1),DTIME)
EQUIVALENCE (TIME(2),TEMP)
EQUIVALENCE (TIME(3),PREDEF)
EQUIVALENCE (TIME(4),DPRED)
C
CALL INIT2(DTIME, NOEL, NPT, LAYER, KSTEP, KINC)
C
* Insert user code here
C
RETURN
END
```
### 4.1.2 宏的创建与应用,提高工作效率
宏是一种可以记录和重放操作序列的脚本工具,能够自动执行重复性的操作任务,显著提升工作效率。在HyperMesh中创建宏通常分为录制和编辑两个步骤。录制宏时,用户可以通过界面上的录制按钮开始记录,然后执行一系列操作,如创建组件、编辑网格、定义材料属性等,这些操作将被软件记录下来。录制完成后,用户可以在宏编辑器中对录制的内容进行编辑和优化,以确保其通用性和准确性。
在宏的编辑器中,用户可以对录制的命令进行修改和注释,也可以添加循环和条件语句来增加宏的灵活性。此外,还可以通过定义参数来实现宏的参数化,使宏能够适应不同的工作场景。宏可以保存为`.hm`文件或`.mac`文件,可以在不同的HyperMesh模型之间共享和重用。
```tcl
# Example of a simple macro to create a component and assign properties
puts "Creating a new component named 'example'"
newcomp -name example
puts "Adding a property named 'example_prop'"
addproperty -name example_prop -type solid
puts "Assigning the created property to the component"
assignproperty -type solid -prop example_prop -comp example
puts "Macro completed"
```
在实际应用中,宏可以应用于重复性的网格划分、批量施加边界条件、自动化模型检查等场景。通过合理利用宏,工程师可以将宝贵的时间和精力专注于更加复杂的工程问题,提高工作效率。
## 4.2 参数化建模与优化流程
### 4.2.1 参数化建模的原理与实际案例
参数化建模是一种通过定义一系列的参数来控制模型形状和尺寸的方法。在HyperMesh中,参数化建模能够实现模型尺寸的快速调整,同时保证网格质量。这在产品设计的多个阶段需要多次迭代的场景下尤其有用。
参数化建模的核心在于使用HyperMesh的宏语言Hyperview来定义参数,并通过宏或用户子程序来修改模型。例如,用户可以定义一个参数来控制零件的长度,当需要改变长度时,只需要修改这个参数的值,随后重新生成模型和网格。
实际案例中,参数化建模可以应用于汽车行业中的车身设计、航空航天领域中的翼型设计等。以车身设计为例,车身的多个部件和组装件可以通过参数化的方式进行设计和优化,从而确保整体设计的一致性以及便于后期修改和迭代。
参数化模型的创建通常需要以下步骤:
1. 确定模型中需要参数化的尺寸和形状,如长度、宽度、高度等。
2. 在HyperMesh中创建这些尺寸的参数,并赋予它们初始值。
3. 使用参数来控制几何形状或网格,确保所有相关元素都与参数相连接。
4. 编写宏或子程序以调整参数值,并重新生成模型。
### 4.2.2 优化算法的选择与设置
优化算法在仿真中是用于改进设计参数,以达到某种性能最佳化目的的计算方法。在HyperMesh中,优化算法通常与有限元分析软件(如OptiStruct)集成使用,可以对材料属性、结构形状、结构布局等进行优化。
选择合适的优化算法依赖于优化问题的类型和要求。例如,对于线性问题可以使用梯度方法,对于复杂的非线性问题则可能需要使用随机搜索或遗传算法。HyperMesh提供了多种优化算法,包括尺寸优化、形状优化、拓扑优化等。
在设置优化时,工程师需要定义优化目标(如最小化重量或最大化刚度)、约束条件(如应力、位移或频率限制)以及设计变量(需要优化的参数)。这些参数通常来自参数化建模过程中定义的参数。
优化流程主要包括:
1. 在HyperMesh中定义优化问题,包括目标函数、约束条件和设计变量。
2. 选择合适的优化算法和求解器。
3. 设置求解器参数,如迭代次数、容差等。
4. 运行优化分析,并通过HyperView等工具检查结果。
优化算法的选择和设置通常需要多次迭代和试验,以找到最佳的设计方案。例如,在结构优化中,工程师可能会关注如何在满足安全和功能的前提下,减少材料用量和成本。
## 4.3 脚本自动化与接口技术
### 4.3.1 HyperMesh API接口的介绍与应用
HyperMesh API(Application Programming Interface)提供了一组编程接口,允许用户通过脚本语言(如Tcl或Python)直接控制HyperMesh的所有功能。这使得用户能够自动化复杂的操作流程,提高工作效率,以及与外部程序进行交互。
API接口通常被分为几个主要部分:几何处理、网格生成、材料属性和边界条件的设置等。使用API接口编程时,用户可以通过调用相应的函数和命令来实现自定义的操作流程。
在实际应用中,API接口可以用于自动化网格划分、批量创建材料属性、集成外部数据处理等。通过编写脚本来完成这些任务,不仅可以减少重复劳动,还可以保证操作的准确性和一致性。
```python
import os
from hypermesh import tetramesh
from hypermesh.api import HyperMesh
# Create a new session of HyperMesh
hm = HyperMesh()
# Create a geometry using API
shell = hm.geometry.create_geometry(1, 'GEOMETRY', 'SHELL')
# Use the geometry for meshing
tetramesh.create_mesh([shell], [1], [1], [1], [1])
# Save the HyperMesh file
hm.file.write('output_file.hmx')
```
### 4.3.2 脚本自动化的工作流程与实例
脚本自动化的工作流程通常包括以下步骤:
1. 确定需要自动化的任务和流程。
2. 学习和掌握相关的API接口和函数。
3. 编写脚本程序来实现自动化任务。
4. 测试脚本以确保其正确性和有效性。
5. 在必要时对脚本进行调试和优化。
6. 部署脚本到生产环境并定期维护更新。
例如,假定需要对一系列相似的几何模型进行网格划分,工程师可以编写一个脚本自动化此流程。脚本首先读取几何文件,然后根据预定义的网格规则创建网格,并最终保存生成的网格模型。该脚本可以设置在设计前期作为预处理步骤使用,这样在设计迭代时就可以快速获得新的网格模型。
在实现过程中,工程师需要注意脚本的兼容性、健壮性以及易用性。例如,需要考虑不同的几何模型输入、异常处理机制以及用户友好的交互界面。
```tcl
proc batch_mesh { geo_files } {
foreach file $geo_files {
hm_file_open $file
hm_file_new
hm_geometry_import $file
hm_mesh_auto_2d
hm_mesh_auto_3d
hm_file_saveas "meshed_$file"
hm_file_close
}
}
# Example usage:
# batch_mesh {"input1.geo" "input2.geo" "input3.geo"}
```
通过使用脚本自动化和API接口,工程师可以创建更加复杂和高效的工作流程,同时提高模型的准确性和仿真结果的可信度。这在面向未来复杂系统仿真时尤为重要,可以帮助工程师快速适应并提高其生产力。
# 5. 仿真实验案例分析
在这一章节中,我们将深入探讨如何使用HyperMesh进行仿真实验案例的建立与分析,并将展示如何诊断和解决仿真过程中遇到的问题。本章节的目的是帮助读者深入理解仿真过程中的关键步骤,以及如何高效地进行问题定位和解决。
## 样本案例的建立与分析
### 案例选择与预处理步骤
在仿真工作中,选择合适的样本案例是至关重要的。样本案例应充分反映现实世界的复杂性,并且需要有足够的代表性以便于分析。选择案例时,应考虑以下几个关键点:
1. 明确仿真目的和目标,了解需要模拟的物理现象和实验条件。
2. 收集必要的数据,包括几何模型、材料属性、边界条件和载荷情况。
3. 确定仿真精度和所需的计算资源。
4. 对模型进行预处理,如简化模型、移除不必要的细节或添加必要的细节,确保模型适合仿真分析。
预处理步骤通常包括:
- 模型简化与细节添加
- 网格划分与优化
- 材料属性和边界条件设定
### 案例分析与仿真结果的解读
仿真完成后,如何解读结果至关重要。这一部分将带领读者了解如何从仿真结果中提取有用信息,并对其进行分析。具体步骤如下:
1. 验证仿真设置是否正确,包括网格、材料、边界条件和载荷是否符合预期。
2. 检查仿真是否收敛,即计算是否达到稳定状态。
3. 提取关键数据,如应力、应变、位移等,并将其与实际测试数据进行比较。
4. 进行结果的可视化展示,以帮助更好地理解仿真结果。
5. 分析结果并给出结论,例如判断结构是否可靠或需要进行设计修改。
### 代码块
以下是一个使用HyperMesh命令语言(HM)进行仿真分析的基本代码框架:
```hm
! 读取模型文件
load file="model_file.fem"
! 设置材料属性
/assign/material/material_id=1/mode=1/density=7.85e-9
! 应用边界条件
/assign/surface/loadcase_id=1/surface_id=1/node_id=1/ux=0
! 运行仿真分析
solve
! 提取结果数据
extract
```
在这个代码块中,我们首先加载了FEM格式的模型文件。之后,我们为材料赋予了ID号,并指定了其密度。接下来,我们为一个表面应用了边界条件,限制了其在X方向上的位移。然后,执行仿真分析,并最终提取结果数据以进行进一步分析。
### 代码逻辑的逐行解读
每一行代码的作用是:
1. `load file="model_file.fem"` - 这条命令用于加载名为`model_file.fem`的有限元模型文件。
2. `/assign/material/material_id=1/mode=1/density=7.85e-9` - 这条命令为材料指定ID为1,并设置其为第一个模式,输入密度为7.85e-9 kg/mm³(对应钢铁材料的密度)。
3. `/assign/surface/loadcase_id=1/surface_id=1/node_id=1/ux=0` - 此命令将ID为1的负载案例应用于ID为1的表面,同时限制了该表面中节点ID为1在X方向上的位移(ux=0)。
4. `solve` - 执行仿真分析的命令。
5. `extract` - 提取仿真结果数据的命令。
在实际操作中,需要根据具体的仿真需求和模型特点对命令进行调整和优化。
# 6. 未来展望与HyperMesh的持续学习路径
在这一章中,我们将探讨HyperMesh的未来发展方向,以及用户如何持续学习和提升技能,以保持与行业发展的同步。
## 6.1 行业发展趋势与HyperMesh的适应性
### 6.1.1 新兴技术对仿真软件的要求
仿真技术在工业领域扮演着越来越重要的角色。随着工业4.0、物联网(IoT)、人工智能(AI)等新兴技术的发展,仿真软件必须适应更加复杂的计算需求和数据处理能力。
HyperMesh作为一款成熟的前处理工具,一直在不断更新以满足这些新兴技术的要求。例如,它已经集成了一些AI算法,可以帮助用户优化网格划分和材料属性的选择。此外,HyperMesh也增强了与物联网设备的兼容性,使得从物理设备中获取数据进行仿真的过程变得更加容易。
### 6.1.2 HyperMesh在行业中的应用前景
随着仿真在产品设计周期中的作用日益重要,HyperMesh的应用前景看起来非常光明。特别是在汽车、航空航天、船舶制造等对产品安全性要求极高的行业,通过HyperMesh进行的仿真工作可以大大缩短产品开发周期,降低试错成本。
此外,HyperMesh也在积极推动与其他仿真软件的集成,例如与OptiStruct、 RADIOSS等Altair公司的软件产品无缝配合,以及与第三方计算平台如ANSYS和ABAQUS的接口,为用户提供一站式的仿真解决方案。
## 6.2 持续学习资源与社群支持
### 6.2.1 在线教程、课程与认证
为了跟上HyperMesh的更新,用户需要不断学习新的功能和技巧。幸运的是,Altair公司以及第三方教育机构提供了大量的学习资源,包括在线教程、专业课程和认证项目。
用户可以通过Altair University在线学习平台,访问到官方认证的课程。这些课程涵盖从入门级到高级的各种技能,旨在帮助用户深入理解HyperMesh的各个方面。此外,参加并通过官方认证考试,可以获得认证证书,这对职业发展非常有帮助。
### 6.2.2 HyperWorks用户社群与专业支持
HyperWorks用户社群是一个全球性的网络,提供了用户间交流经验、解决问题的平台。用户可以在社群中提问、分享最佳实践、参加网络研讨会或培训,甚至参与由Altair组织的全球性会议和竞赛,如Altair技术大会和HyperWorks挑战赛。
此外,Altair还提供专业支持服务,用户可以通过技术支持邮箱或在线聊天获得帮助。这些服务可以帮助用户解决在使用HyperMesh过程中遇到的棘手问题,从而更快地完成项目。
通过持续的学习和社群的互动,HyperMesh用户可以确保自己的技能始终处于行业前沿,为未来在仿真领域的发展做好准备。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 HyperMesh 帮助文档(中文)专栏!在这里,您将找到一系列深入的文章,涵盖从入门到精通的 HyperMesh 使用技巧。从网格划分秘籍到材料属性设置、网格质量控制、几何清理、动态仿真设置、优化设计流程、接触问题处理、网格诊断、与 MSC.Patran 的对比分析、编织复合材料建模、子模型技术,再到汽车工业应用案例,我们应有尽有。无论您是仿真新手还是经验丰富的专家,这些文章都能帮助您掌握 HyperMesh 的高级功能,提升仿真实效与效率,成为一名真正的仿真专家。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【RTCM 3.3协议的10大秘密】:精通实时定位技术的终极指南

参考资源链接:[RTCM 3.3协议详解:全球卫星导航系统差分服务最新标准](https://wenku.csdn.net/doc/7mrszjnfag?spm=1055.2635.3001.10343)
# 1. RTCM 3.3协议概述
RTCM 3.3是实时差分全球定位系统(GNSS
【深度学习的交通预测力量】:构建上海轨道交通2030的智能预测模型

参考资源链接:[上海轨道交通规划图2030版-高清](https://wenku.csdn.net/doc/647ff0fc
升级你的IS903:固件更新全攻略,提升性能与稳定性的终极指南

参考资源链接:[银灿IS903优盘完整的原理图](https://wenku.csdn.net/doc/6412b558be7fbd1778d42d25?spm=1055.2635.3001.10343)
# 1. IS903固件更新的必要性和好处
## 理解固件更新的重要性
固件更新,对于任何智能设备来说,都是一个关键的维护步骤。IS903作为一款高性能的设备,其固件更新不仅仅是为了修
ROST软件高级用户必看:全面掌握工具每一个细节的独家技巧
参考资源链接:[ROST内容挖掘系统V6用户手册:功能详解与操作指南](https://wenku.csdn.net/doc/5c20fd2fpo?spm=1055.2635.3001.10343)
# 1. ROST软件概述与安装指南
## ROST
【cx_Oracle权威指南】:版本升级、环境配置与最佳实践案例解析
参考资源链接:[cx_Oracle使用手册](https://wenku.csdn.net/doc/6476de87543f84448808af0d?spm=1055.2635.3001.10343)
# 1. cx_Oracle简介与历史回顾
cx_Oracle 是一个流行的 Python 扩展,用于访问 Oracle 数据库。它提供了一个接口,允许 Python 程序
ZMODEM vs XMODEM vs YMODEM:三者的优劣比较分析及选型建议

参考资源链接:[ZMODEM传输协议深度解析](https://wenku.csdn.net/doc/647162cdd12cbe7ec3ff9be7?spm=1055.2635.3001.10343)
# 1. ZMODEM、XMODEM与YMODEM协议概述
在现代数据通
ARINC664协议的可靠性与安全性:详细案例分析与实战应用

参考资源链接:[AFDX协议/ARINC664中文详解:飞机数据网络](https://wenku.csdn.net/doc/66azonqm6a?spm=1055.2635.3001.10343)
# 1. ARINC664协议概述
ARINC664协议,作为一种在航空电子系统中广泛应用的数据通信标准,已经成为现代飞机通信网络的核心技术之一。它不仅确保了
HEC-GeoHMS在洪水风险评估中的应用实战:案例分析与操作技巧
参考资源链接:[HEC-GeoHMS操作详析:ArcGIS准备至流域处理全流程](https://wenku.csdn.net/doc/4o9gso36xa?spm=1055.2635.3001.10343)
# 1. HEC-GeoHMS概述与洪水风险评估基础
## 1.1 HEC-GeoHMS简介
HEC-GeoHMS是一个强大的GIS工具,用于洪水风险评估和洪水模型的前期准备工作。它是HEC-HMS(Hydro
MIPI CSI-2信号传输精髓:时序图分析专家指南
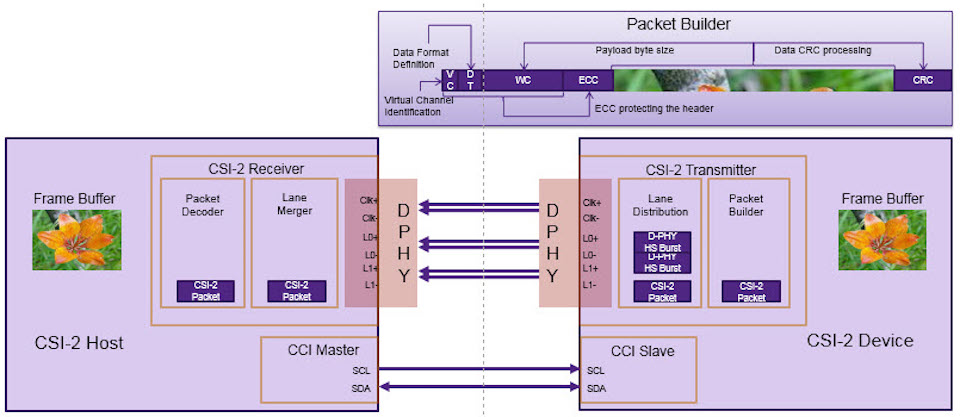
参考资源链接:[mipi-CSI-2-标准规格书.pdf](https://wenku.csdn.net/doc/64701608d12cbe7ec3f6856a?spm=1055.2635.3001.10343)
# 1. MIPI CSI-2信号传输基础
MIPI CSI-2 (Mobile Industry Processor
【系统维护】创维E900 4K机顶盒:更新备份全攻略,保持最佳状态

参考资源链接:[创维E900 4K机顶盒快速配置指南](https://wenku.csdn.net/doc/645ee5ad543f844488898b04?spm=1055.2635.3001.10343)
# 1. 创维E900 4K机顶盒概述
## 简介
创维E900 4K机顶盒是一款集成了最新技术的家用多媒体设备,支持4K超高清视频播放和多
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )