工业控制系统效率提升:Modbus协议优化实战技巧
发布时间: 2024-12-05 02:10:50 阅读量: 17 订阅数: 22 

Windows CE.NET嵌入式工业用控制器及自动控制系统设计

参考资源链接:[Modbus协议中文版【完整版】.pdf](https://wenku.csdn.net/doc/645f30805928463033a7a0fd?spm=1055.2635.3001.10343)
# 1. Modbus协议基础与工业控制系统概述
Modbus协议自1979年问世以来,已经成为工业自动化领域广泛使用的一种通信协议。它最初由Modicon公司设计,现已成为一个公开标准(ISO 11898)。
## 1.1 工业控制系统的发展背景
工业控制系统(ICS)是用于监控和控制工业流程的一系列设备和软件。从早期的模拟系统到现在的数字化、网络化,工业控制系统的演变极大地提高了生产效率和系统灵活性。
## 1.2 Modbus协议的特点
Modbus协议具有简单、高效、开放等特点,支持多种物理层,如RS-232, RS-485, TCP/IP等。这些特点使得Modbus非常适合用于链接众多的工业设备。
## 1.3 Modbus在工业自动化中的应用
在工业自动化中,Modbus协议被用于各种设备间的数据交换,如PLC(可编程逻辑控制器)与人机界面(HMI)之间的通信,以及与现场总线系统的集成。
接下来的章节中,我们将深入探讨Modbus协议的核心概念、通信模型、数据流和错误检测机制。这将为理解整个Modbus协议体系提供坚实的基础。
# 2. Modbus协议的理论基础及通信机制
## 2.1 Modbus协议的核心概念
### 2.1.1 Modbus协议的数据模型
Modbus协议的数据模型是构建在基于主从架构上的,它规定了数据如何在控制器和被控制设备之间进行交换。数据模型主要包含三个部分:地址、数据类型和数据值。
在Modbus中,每个从站设备都有一个唯一的地址,这使得主站可以精确地定位到网络中的每一个设备。数据类型通常是指输入、输出、寄存器等,它们定义了数据存储的方式和如何被访问。数据值则是具体的数据内容,比如温度值、开关状态等。
#### 代码解析
下面是一个简化的Modbus数据模型的示例,使用了Python的伪代码表示,以帮助理解数据结构:
```python
class ModbusDataModel:
def __init__(self, address, datatype, value):
self.address = address
self.datatype = datatype # 比如是数字量输入、线圈状态等
self.value = value
# 创建数据模型实例
data = ModbusDataModel(address=1, datatype='input', value=1)
print(f"数据模型的地址: {data.address}")
print(f"数据类型: {data.datatype}")
print(f"数据值: {data.value}")
```
在Modbus数据模型中,地址是至关重要的,它是每一个数据元素的身份标识。数据类型定义了这个地址如何被读取和写入,比如,线圈和离散输入是二进制的,它们通常表示的是开/关的状态;而保持寄存器和输入寄存器则可以存储更复杂的数据,比如数字量的读数。
### 2.1.2 Modbus协议的功能码解析
Modbus协议使用功能码来定义不同的请求和响应操作。功能码是Modbus数据包中的一部分,告诉从站需要执行何种操作,如读取数据、写入数据等。
常见的功能码包括:0x01(读线圈状态),0x02(读离散输入状态),0x03(读保持寄存器),0x04(读输入寄存器),0x05(写单个线圈),0x06(写单个寄存器),0x15(写多个线圈),0x16(写多个寄存器)等。
#### 功能码代码示例
以下是一个示例代码,说明如何在Python中使用功能码:
```python
functional_codes = {
0x01: "Read Coils",
0x02: "Read Discrete Inputs",
0x03: "Read Holding Registers",
0x04: "Read Input Registers",
# 其他功能码...
}
# 使用功能码
function_code = 0x03
print(f"功能码为{function_code}代表{functional_codes[function_code]}操作。")
```
功能码是Modbus协议通信的核心,它允许主站向从站发出各种请求,从站根据功能码进行相应操作,并返回响应数据包。
## 2.2 Modbus协议的通信模型
### 2.2.1 主站与从站的交互方式
在Modbus网络中,主站(也称为客户端)负责发送请求,而从站(也称为服务器)负责响应这些请求。主站发起读写操作,从站响应操作结果。这个过程需要遵循Modbus协议的规则,比如正确的功能码使用和数据封装。
### 2.2.2 TCP与RTU模式的对比分析
Modbus协议有两种主要的通信模式:Modbus TCP和Modbus RTU。
Modbus TCP是在TCP/IP协议上实现的,使用标准的以太网传输。它在数据传输上更为可靠,因为TCP本身提供错误检测和数据重传机制。
Modbus RTU是串行通信模式,它依赖于物理层的RS-232、RS-422、RS-485等通信接口。RTU模式的数据传输效率更高,因为它使用二进制格式并且减少了数据包大小。
#### 通信模型对比表
| 特性 | Modbus TCP | Modbus RTU |
|-----------------|--------------------------|-----------------------------|
| 底层协议 | TCP/IP | RS-232/RS-422/RS-485 |
| 数据包大小 | 相对较大 | 相对较小 |
| 数据传输速率 | 较快(取决于网络带宽) | 较快(取决于波特率) |
| 传输介质 | 以太网电缆 | 串行电缆 |
| 可靠性 | 高(TCP协议保证数据传输)| 较低(需要额外的错误检测机制)|
| 实时性 | 低(网络延迟) | 高(较少的延迟) |
## 2.3 Modbus协议的数据流和错误检测
### 2.3.1 数据封装与传输过程
在Modbus协议中,数据流的封装与传输包括地址、功能码、数据以及校验和。
每个Modbus消息都以设备地址开始,这使得从站能够识别消息是针对自己的。接下来是功能码,指示了请求或响应的类型。数据字段随后,包含了实际的信息内容。最后,通过计算数据和功能码的校验和(如CRC校验)来确保数据在传输过程中没有发生错误。
### 2.3.2 常见通信故障分析及解决
在Modbus通信过程中可能会遇到多种故障,如帧同步错误、响应超时等。为了解决这些故障,通常需要在网络调试过程中检查通信设置、电缆连接、电气干扰等因素。
#### 故障诊断代码示例
以下是使用Python进行Modbus通信故障诊断的一个简单例子:
```python
import time
def check_modbus_communication():
try:
# 假设是Modbus通信过程的某部分代码
# ...
response = modbus_client.read_holding_registers(address, quantity)
if response.isError():
raise Exception(f"通信错误码: {response.errCode}")
except Exception as e:
print(f"通信异常: {str(e)}")
# 根据错误类型进行诊断和处理
# ...
# 调用函数进行通信诊断
check_modbus_communication()
```
在这个例子中,如果检测到响应是错误的,就会抛出异常,然后可以编写进一步的错误处理逻辑。
总结来说,理解Modbus协议的理论基础和通信机制对于实现稳定和高效的通信至关重要。数据模型和功能码是核心概念,而主站与从站的交互方式以及TCP与RTU模式的对比分析为通信提供了多种实现路径。错误检测和故障解决是确保通信质量的不可或缺的环节。在后续章节中,我们将进一步探讨如何优化

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到“Modbus协议中文版”专栏,一个全面的资源库,涵盖Modbus协议的各个方面。本专栏汇集了专家级的文章,内容涵盖广泛,从Modbus与PLC集成的最佳实践到在能源管理中应用Modbus的详细分析。您将找到有关搭建Modbus通信环境的逐步指南、定制Modbus协议以满足特定需求的秘籍,以及在可再生能源系统和农业现代化中使用Modbus的创新案例。此外,本专栏还深入探讨了Modbus异常处理机制、与现场总线技术的整合策略,以及在智能交通系统中应用Modbus的新策略。无论您是Modbus新手还是经验丰富的专业人士,本专栏都能为您提供宝贵的见解和实用指南。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Simulink单点扫频技术速成】:零基础到实战专家的快速通道

# 摘要
Simulink作为一种基于MATLAB的多领域仿真和模型设计环境,广泛应用于系统工程和嵌入式系统的开发中。本文首先概述了Simulink在单点扫频技术应用中的基础理论和工作界面。随后,详细介绍了在Simulink环境下实现单点扫频技术的实践技巧,包括信号生成、控制、测量、分析及优化等关键技术环节。文章第四章深入探讨了单点扫频技术在更复杂环境下的高级应用,如多信号源
【PetaLinux驱动开发基础】:为ZYNQ7045添加新硬件支持的必备技巧
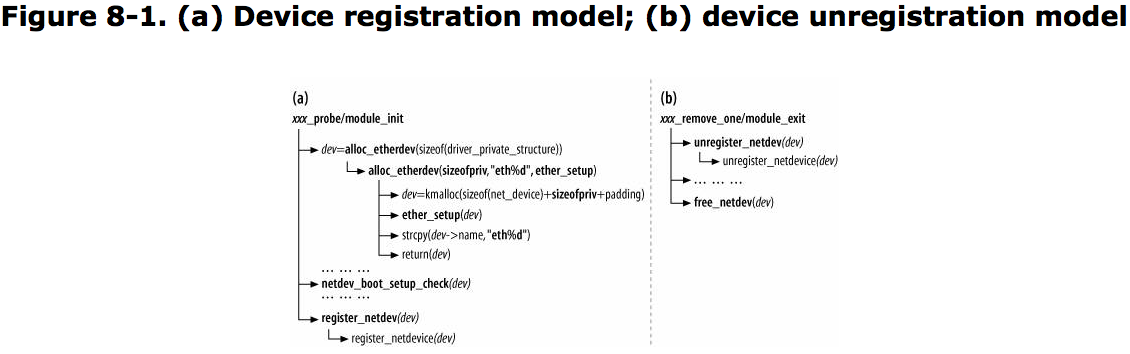
# 摘要
本文旨在为使用ZYNQ7045平台和PetaLinux的开发人员提供一个全面的参考指南,涵盖从环境搭建到硬件驱动开发的全过程。文章首先介绍了ZYNQ7045平台和PetaLinux的基本概念,随后详细讲解了PetaLinux环境的搭建、配置以及系统定制和编译流程。接着,转向硬件驱动开发的基础知识,包括驱动程序的分类、Linux内核模块编
【PAW3205DB-TJ3T集成指南】:实现设备与系统无缝对接的高级技巧
# 摘要
本文详细阐述了设备集成的全面指南,涵盖了从理论基础到实践应用的各个环节。首先介绍了集成的前期准备和预处理工作,随后深入探讨了系统对接的理论基础,包括集成原则、接口与协议的选择与配置,以及数据交换的处理机制。重点分析了PAW3205DB-TJ3T设备的集成实践,包括设备初始化、系统级集成步骤以及故障排除和调试过程。在系统对接的高级配置技巧方面,讨论了自定义集成方案设计、安全机制强化和多系统协同工作的策略。通过案例研究与实战演练,本文展示了集成过程中的关键实施步骤,并对未来设备集成趋势和持续集成与持续交付(CI/CD)流程进行了展望。本文旨在为读者提供一个系统的集成指南,帮助他们在设备集
【iOS 11实战秘籍】:适配过程中的兼容性处理与实用技巧
# 摘要
随着iOS 11的推出,开发者面临着一系列的适配挑战,尤其在新特性的集成、性能优化及兼容性处理方面。本文首先概述了iOS 11的更新要点和理论基础,包括安全性提升、ARKit和Core ML集成等。随后,详细讨论了从UI适配到性能优化,再到数据存储管理的实战技巧,旨在帮助开发者解决兼容性问题并提升应用质量。文章还提供了提升开发效率的工
SNAP在数据备份中的应用:最佳实践与案例分析

# 摘要
本文全面介绍了SNAP技术的理论基础、实践应用及其在现代信息技术环境中的高级应用。SNAP技术作为数据备份和恢复的一种高效手段,对于保障数据安全、提高数据一致性具有重要意义。文章首先阐述了SNAP技术的核心原理和分类,并讨论了选择合适SNAP技术的考量因素。接着,通过实践应用的介绍,提供了在数据备份和恢复方面的具体实施策略和常见问题解决方案。最后,文章探讨了SNAP
深入TracePro光源设定:TracePro 7.0高级操作技巧

# 摘要
本文深入探讨了TracePro软件中光源设定的各个方面,从理论基础到实践操作,再到高级技巧及进阶应用。首先概述了光源的类型与特性,并介绍了光学仿真中光源参数的作用,随后详细阐述了如何创建和模拟自定义光源,以及光源与光学系统的交互效果。接着,针对光源设定的高级操作技巧,包括优化与校准、集成与测试、自动化与脚本控制进行了全面的分析。本文还探讨了光源与光学元件协同设计的策略和创新方法,并展
FC-AE-ASM协议与数据中心最佳实践:案例研究与故障排除技巧
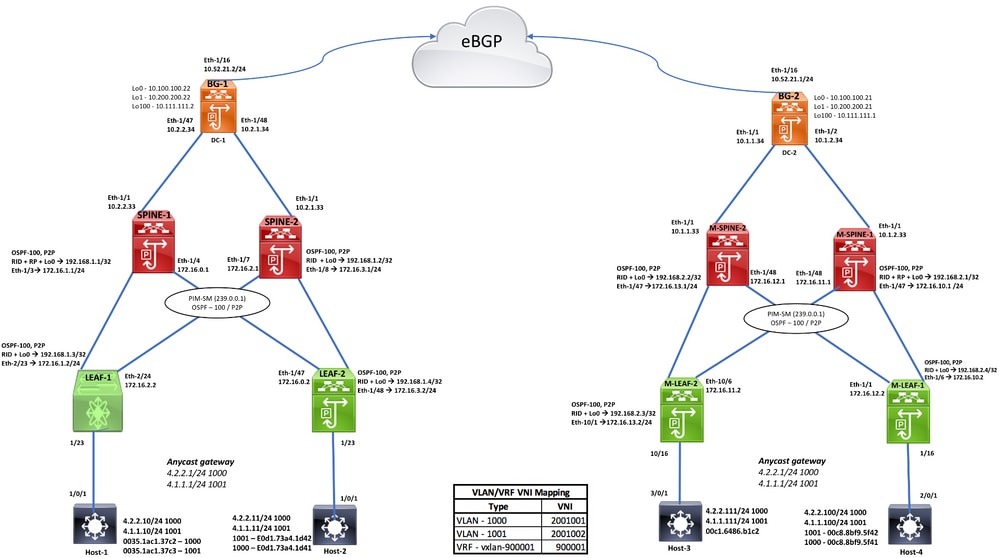
# 摘要
FC-AE-ASM协议作为数据中心通信的关键技术,其高效的架构和通信模型对现代数据传输和处理起着核心作用。本文首先对FC-AE-ASM协议进行概述,并详细分析了其理论基础,包括主要组件、数据传输流程以及技术规范与传统FC协议的区别
优化通信系统:MMSI编码表与无线电频率分配的协同策略

# 摘要
本文全面探讨了MMSI编码表的构建、管理和无线电频率分配的原则与方法。首先介绍了MMSI编码表的基本概念及其在无线电管理中的作用,阐述了编码表构建的方法以及维护更新的策略。接着,本文深入分析了无线电频率分配的基本原理、策略制定、实施与管理,并探讨了MMSI编码表与频率分配如何协同
ZKTime 5.0考勤机SQL Server数据库维护最佳实践
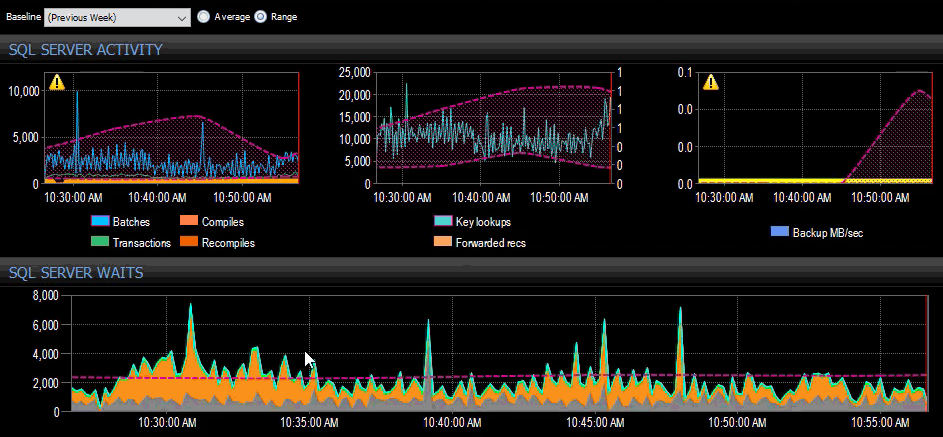
# 摘要
本文深入介绍了ZKTime 5.0考勤机的数据库管理与维护,内容涵盖从基础的SQL Server数据库维护到高级的性能优化技巧。重点讲解了数据库性能监控、数据备份与恢复策略、安全管理等方面的基础知识与实用技巧,同时探讨了数据库日志文件管理、索引优化、定期维护任务的必要性及其执行方法。进一步,本文详细分析了数据库故障排除的诊断方法,包括故障日志分析和性能瓶颈定位,并通过案例研究,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )