【避障算法探讨】:打造具备智能回避功能的小车
发布时间: 2024-12-20 08:44:12 阅读量: 3 订阅数: 15 

智能小车路径规划算法,最短路径、避障(python)
# 摘要
避障算法作为机器人和自动驾驶等领域中的关键技术,其核心目的在于实现智能系统在复杂环境中的安全运行。本文系统性地介绍了避障算法的基本概念、理论基础以及实际应用。通过探讨避障算法的数学模型,包括空间几何模型和动态环境建模,以及分类分析碰撞检测、路径规划和多传感器数据融合方法,文章深入阐释了避障算法的理论支撑。此外,本文还详细论述了基于传感器和视觉的避障系统设计,包括硬件选择、集成及实地测试与调优。最后,针对避障算法的性能优化和当前面临的挑战,如复杂环境适应性和人机交互的伦理问题进行了探讨,并展望了人工智能在避障技术中的应用前景及法规标准化进程。
# 关键字
避障算法;数学模型;路径规划;多传感器融合;系统集成;性能优化
参考资源链接:[51单片机超声波避障小车Proteus仿真教程](https://wenku.csdn.net/doc/644cba22ea0840391e58ff29?spm=1055.2635.3001.10343)
# 1. 避障算法的基本概念
避障算法是移动机器人、自动驾驶汽车、无人机等自主导航系统中不可或缺的一部分。其核心目的是在保持安全距离的前提下,使载体能够有效规避各种障碍物。本章将简单介绍避障算法的基本概念,并为后续章节中对理论基础和应用实践的探讨奠定基础。避障算法通常包括实时监测环境状态、分析障碍物位置和运动特性、计算安全路径和执行导航指令等关键步骤。这一过程涉及多种技术的综合运用,包括传感器数据处理、数据融合、路径规划和决策制定等。避障算法的选择和设计必须考虑载体的运行环境、物理限制和任务要求,以确保系统的高效和可靠性。
# 2. 避障算法的理论基础
避障算法是智能系统中不可或缺的组件,无论是在机器人技术、自动驾驶汽车还是在无人机领域,都需要有效地避开障碍物以保障安全运行。本章节将深入探讨避障算法的理论基础,包括其数学模型以及不同类别的避障算法,并以此来构建实际避障系统的基础。
## 2.1 避障算法的数学模型
### 2.1.1 空间几何模型
在智能系统设计中,准确地理解和模拟机器人或车辆的空间环境是至关重要的。空间几何模型是避障算法中的基础,它通常包括点、线、面、体的概念,用以描述障碍物的位置、大小和形状。
为了建模,我们采用三维笛卡尔坐标系,通过坐标点集合 (x, y, z) 来确定每个空间点。通过线段、平面、多边形、多面体等几何元素,可以构建出空间障碍物的几何模型。例如,一个静态障碍物可以用一个多边形(二维空间)或凸多面体(三维空间)来表示。
数学上,空间几何模型主要基于集合论和拓扑学。多边形或凸多面体可以用集合的形式来表示,其中包含了构成其边界的点集合。线段可以由两个端点的坐标来定义,而平面则是通过法向量和一点来确定。
例如,一条线段 L 可以表示为两个点 A 和 B 的集合 L = {P | P = A + t(B-A), t ∈ [0, 1]},其中 t 是从 0 到 1 的参数。通过使用这样的数学表述,避障算法可以计算出机器人或车辆与障碍物的相对位置,进而进行路径规划或采取避障行动。
```math
L = {P | P = A + t(B - A), t \in [0, 1]}
```
这里,P 表示线段上的任意点,A 和 B 是线段的两个端点,t 为参数。
### 2.1.2 动态环境建模
与静态障碍物不同,动态环境建模需要考虑时间因素,即障碍物的位置随时间的变化。动态环境通常用时变函数来描述,如障碍物的位置可以表示为时间的函数。
动态障碍物的位置可以用参数方程来表示,例如,一个移动的物体的位置可以用如下方程表示:
```math
P(t) = P_0 + V \cdot t
```
其中,P(t) 表示在时间 t 时的位置,P_0 表示初始位置,V 表示速度向量。通过这样的建模,避障算法可以预测未来某一时间点障碍物可能的位置,并据此来规划安全的路径。
对于复杂的动态场景,例如交通流模型,可能需要使用复杂的微分方程或系统动态模型来捕捉所有动态因素。这包括其他移动对象的潜在行为和可能产生的交互作用。
## 2.2 避障算法的分类
避障算法在不同应用场景中有所区别,基于其应用原理和处理信息的方式,可以大致分为碰撞检测算法、路径规划算法和多传感器数据融合算法。
### 2.2.1 碰撞检测算法
碰撞检测算法主要用于检测和判断物体间是否存在碰撞的可能性。碰撞检测在计算机图形学、机器人学和虚拟现实等领域尤为重要。
一种常见的碰撞检测算法是“分离轴定理”(Separating Axis Theorem,SAT),它利用投影和分离轴来判断两个凸多面体是否相交。简而言之,如果在所有可能的分离轴上,两物体的投影不重叠,则它们不相交,否则它们可能会相撞。
SAT算法适合检测凸多面体之间的碰撞,而无法直接用于非凸物体。对于非凸物体,通常需要先将其分割成凸子集,再使用SAT算法进行碰撞检测。
```python
def separating_axis_theorem(poly1, poly2):
# 此处为伪代码,仅用于展示算法逻辑
axes = compute_possible_separating_axes(poly1, poly2)
for axis in axes:
if projections_non_overlapping(poly1, poly2, axis):
return False
return True
```
在此代码段中,`compute_possible_separating_axes` 和 `projections_non_overlapping` 都是假定存在的函数,用于计算可能的分离轴和判断两个多面体在某轴上的投影是否重叠。
### 2.2.2 路径规划算法
路径规划算法负责在已知环境中寻找从起点到终点的路径,同时避开障碍物。路径规划问题通常可以通过图论中的搜索算法来解决,例如A*算法、Dijkstra算法等。
A*算法是最流行的路径规划算法之一,它结合了最佳优先搜索和最短路径搜索的优点。A*算法使用启发式函数评估节点的优先级,优先扩展那些估计成本最低的节点。
```python
def a_star_search(start, goal, heuristic):
open_set = PriorityQueue()
open_set.add(start, priority=heuristic(start, goal))
came_from = {}
cost_so_far = {start: 0}
while not open_set.is_empty():
current = open_set.pop_lowest_priority()
if current == goal:
return reconstruct_path(came_from, current)
for next in current.neighbors():
new_cost = cost_so_far[current] + distance(current, next)
if next not in cost_so_far or new_cost < cost_so_far[next]:
cost_so_far[next] = new_cost
priority = new_cost + heuristic(next, goal)
open_set.add(next, priority=priority)
came_from[next] = current
return failure # 没有找到路径
```
在这段伪代码中,`PriorityQueue()` 表示优先队列,它用于存储待考察的节点,并按照启发式函数计算出的优先级排序。`heuristic` 函数负责计算启发式估计,常用的启发式函数如曼哈顿距离或欧几里得距离。
### 2.2.3 多传感器数据融合
在现实世界中,单一传感器往往很难提供完备的信息以供避障,因此多传感器数据融合算法变得尤为重要。这类算法能够将来自不同传感器的数据结合起来,为智能系统提供更加全面和可靠的环境信息。
一种常见的方法是卡尔曼滤波器(Kalman Filter),它可以有效地融合来自多个传感器的数据,并预测下一时刻的状态。卡尔曼滤波器通过建立状态空间模型来估计系统状态,其包括预测和更新两个步骤。
```math
\hat{x}_k^- = A \hat{x}_{k-1} + B u_k
P_k^- = A P_{k-1} A^T + Q
K_k = P_k^- H^T (H P_k^- H^T + R)^{-1}
\hat{x}_k = \hat{x}_k^- + K_k (z_k - H \hat{x}_k^-)
P_k = (I - K_k H) P_k^-
```
上述数学表达式描述了卡尔曼滤波器的标准步骤,其中:
- $\hat{x}_k^-$ 是在接收到新观测之前对状态的预测。
- $P_k^-$ 是预测误差协方差矩阵。
- $K_k$ 是卡尔曼增益。
- $z_k$ 是新的观测值。
- $H$ 是观测矩阵。
- $Q$ 和 $R$ 分别是过程噪声和观测噪声的协方差矩阵。
- $\hat{x}_k$ 和 $P_k$ 是滤波后的状态估计和误差协方差矩阵。
在多传感器数据融合中,卡尔曼滤波器常被用于整合位置、速度等不同传感器提供的信息,提高了系

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“基于51单片机的超声波避障小车设计(含Proteus仿真)”为题,深入探讨了超声波避障小车的设计、实现、仿真和调试技巧。专栏内容涵盖了51单片机应用、Proteus仿真基础、超声波技术、避障算法、嵌入式编程、电机驱动、系统集成、故障排除、电路设计、仿真进阶、远程控制、电机驱动和电源管理等多个方面。通过循序渐进的讲解和丰富的案例,专栏旨在帮助读者掌握超声波避障小车的设计与实现,并提升在51单片机应用、Proteus仿真和嵌入式系统开发方面的技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
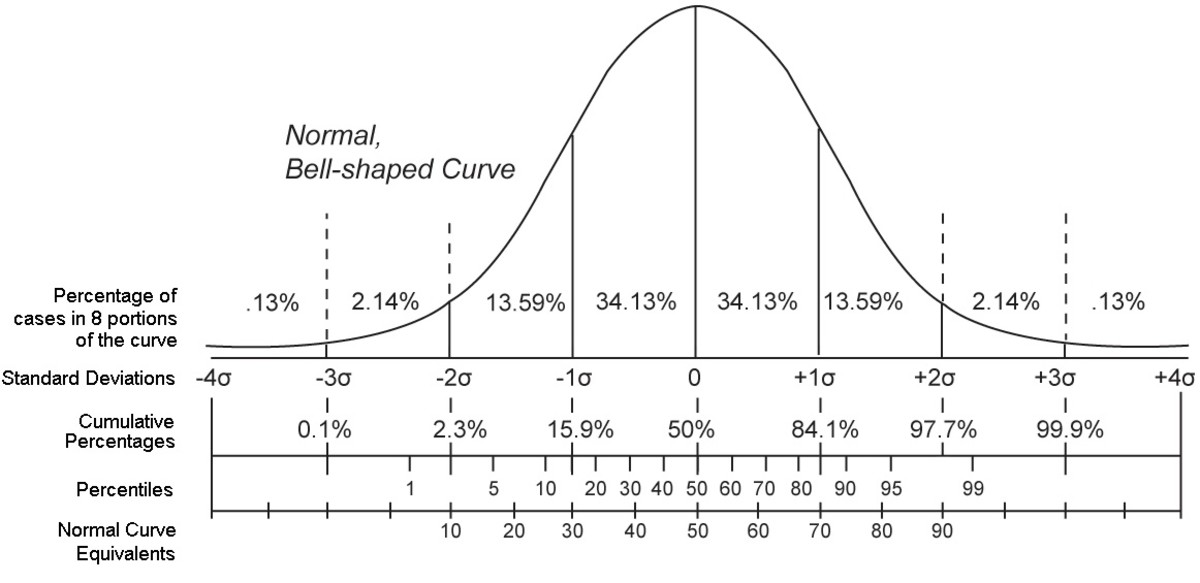
【概率论与数理统计:工程师的实战解题宝典】:揭示习题背后的工程应用秘诀
# 摘要
本文从概率论与数理统计的角度出发,系统地介绍了其基本概念、方法与在工程实践中的应用。首先概述了概率论与数理统计的基础知识,包括随机事件、概率计算以及随机变量的数字特征。随后,重点探讨了概率分布、统计推断、假设检验
【QSPr参数深度解析】:如何精确解读和应用高通校准综测工具

# 摘要
QSPr参数是用于性能评估和优化的关键工具,其概述、理论基础、深度解读、校准实践以及在系统优化中的应用是本文的主题。本文首先介绍了QSPr工具及其参数的重要性,然后详细阐述了参数的类型、分类和校准理论。在深入解析核心参数的同时,也提供了参数应用的实例分析。此外,文章还涵盖了校准实践的全过程,包括工具和设备准备、操作流程以及结果分析与优化。最终探讨了QSPr参数在系统优化中的
探索自动控制原理的创新教学方法

# 摘要
本文深入探讨了自动控制理论在教育领域中的应用,重点关注理论与教学内容的融合、实践教学案例的应用、教学资源与工具的开发、评估与反馈机制的建立以
Ubuntu 18.04图形界面优化:Qt 5.12.8性能调整终极指南

# 摘要
本文全面探讨了Ubuntu 18.04系统中Qt 5.12.8图形框架的应用及其性能调优。首先,概述了Ubuntu 18.04图形界面和Qt 5.12.8核心组件。接着,深入分析了Qt的模块、事件处理机制、渲染技术以及性能优化基
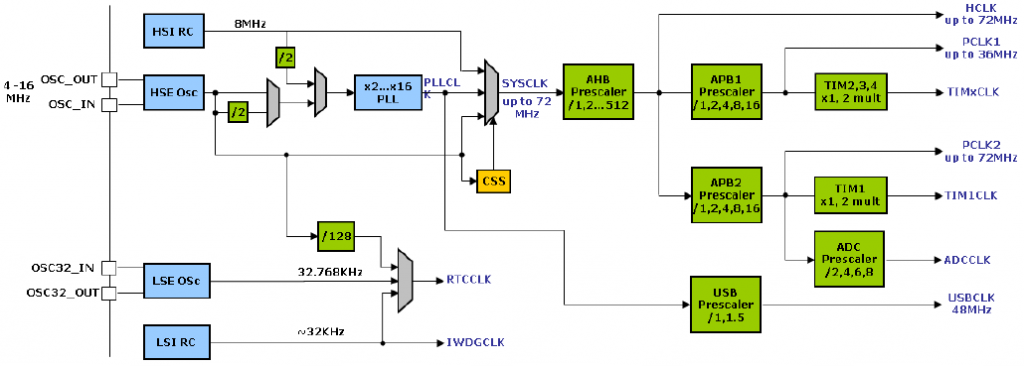
STM32F334节能秘技:提升电源管理的实用策略
# 摘要
本文全面介绍了STM32F334微控制器的电源管理技术,包括基础节能技术、编程实践、硬件优化与节能策略,以及软件与系统级节能方案。文章首先概述了STM32F334及其电源管理模式,随后深入探讨了低功耗设计原则和节能技术的理论基础。第三章详细阐述了RTOS在节能中的应用和中断管理技巧,以及时钟系统的优化。第四章聚焦于硬件层面的节能优化,包括外围设备选型、电源管
【ESP32库文件管理】:Proteus中添加与维护技术的高效策略
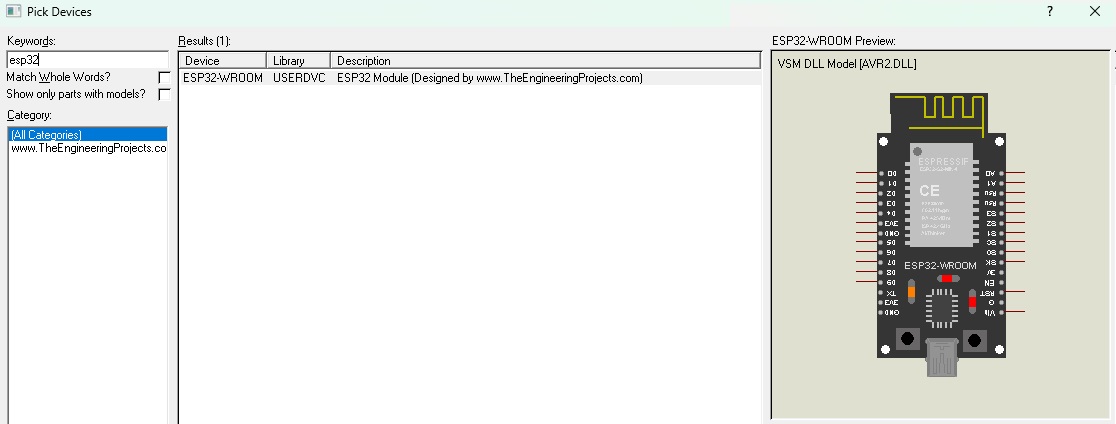
# 摘要
本文旨在全面介绍ESP32微控制器的库文件管理,涵盖了从库文件基础到实践应用的各个方面。首先,文章介绍了ESP32库文件的基础知识,包括库文件的来源、分类及其在Proteus平台的添加和配置方法。接着,文章详细探讨了库文件的维护和更新流程,强调了定期检查库文件的重要性和更新过程中的注意事项。文章的第四章和第五章深入探讨了ESP3
【实战案例揭秘】:遥感影像去云的经验分享与技巧总结

# 摘要
遥感影像去云技术是提高影像质量与应用价值的重要手段,本文首先介绍了遥感影像去云的基本概念及其必要性,随后深入探讨了其理论基础,包括影像分类、特性、去云算法原理及评估指标。在实践技巧部分,本文提供了一系列去云操作的实际步骤和常见问题的解决策略。文章通过应用案例分析,展示了遥感影像去云技术在不同领域中的应用效果,并对未来遥感影像去云技术的发
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )