OpenCV图像预处理技巧:提升物体识别准确率,优化图像,精准识别
发布时间: 2024-08-06 21:22:52 阅读量: 184 订阅数: 41 

【OPENCV】图像的预处理(灰度图、二值化、字符矫正(旋转))

# 1. 图像预处理概述**
图像预处理是图像处理过程中至关重要的一步,旨在增强图像质量、去除噪声和改善图像特征的提取。它涉及一系列技术,包括图像增强、图像变换和图像分割。
图像增强技术通过调整图像的对比度、亮度和噪声水平,改善图像的可视性和信息内容。图像变换技术通过缩放、旋转、仿射和透视变换,调整图像的大小、方向和形状。图像分割技术将图像分割成具有相似特征的区域,为进一步的分析和处理奠定基础。
这些预处理技术在各种图像处理应用中发挥着至关重要的作用,例如图像分类、目标检测、医疗成像和遥感。它们通过提高图像质量、提取相关特征和简化后续处理,为准确和有效的图像分析铺平了道路。
# 2. 图像增强技术
图像增强技术旨在改善图像的视觉质量,使其更适合特定任务或应用。本章将介绍三种常用的图像增强技术:对比度和亮度调整、噪声去除和图像锐化。
### 2.1 对比度和亮度调整
对比度和亮度是图像中两个重要的视觉属性。对比度是指图像中明暗区域之间的差异,而亮度是指图像的整体亮度。调整对比度和亮度可以改善图像的可视性,使其更适合特定应用。
#### 2.1.1 直方图均衡化
直方图均衡化是一种图像增强技术,通过调整图像的直方图来改善其对比度。直方图是图像中像素值分布的统计表示。直方图均衡化通过将直方图展平,使图像中所有像素值都均匀分布,从而提高图像的对比度。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 进行直方图均衡化
equ = cv2.equalizeHist(image)
# 显示原始图像和均衡化后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Equalized Image', equ)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.equalizeHist(image)`函数对输入图像`image`进行直方图均衡化,并返回均衡化后的图像。
* `cv2.imshow()`函数显示原始图像和均衡化后的图像。
* `cv2.waitKey(0)`函数等待用户输入,按任意键退出。
* `cv2.destroyAllWindows()`函数关闭所有打开的窗口。
#### 2.1.2 自适应直方图均衡化
自适应直方图均衡化是一种局部对比度增强技术,它将图像划分为小块,并对每个块进行直方图均衡化。这允许在保持图像整体对比度的同时,增强局部区域的对比度。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 进行自适应直方图均衡化
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
clahe_img = clahe.apply(image)
# 显示原始图像和自适应直方图均衡化后的图像
cv2.imshow('Original Image', image)
cv2.imshow('CLAHE Image', clahe_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.createCLAHE()`函数创建一个自适应直方图均衡化对象,其中`clipLimit`参数控制对比度增强程度,`tileGridSize`参数指定图像划分的块大小。
* `clahe.apply(image)`函数对输入图像`image`进行自适应直方图均衡化,并返回均衡化后的图像。
* `cv2.imshow()`函数显示原始图像和自适应直方图均衡化后的图像。
* `cv2.waitKey(0)`函数等待用户输入,按任意键退出。
* `cv2.destroyAllWindows()`函数关闭所有打开的窗口。
### 2.2 噪声去除
噪声是图像中不需要的随机像素值变化。噪声会降低图像的质量,使其难以解释和分析。噪声去除技术旨在消除或减少图像中的噪声。
#### 2.2.1 均值滤波
均值滤波是一种线性滤波器,它通过计算图像中每个像素周围邻域的平均值来去除噪声。均值滤波可以有效去除高斯噪声和椒盐噪声。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('noisy_image.jpg')
# 进行均值滤波
blur = cv2.blur(image, (5, 5))
# 显示原始图像和均值滤波后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Blurred Image', blur)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.blur(image, (5, 5))`函数对输入图像`image`进行均值滤波,其中`(5, 5)`参数指定滤波器核的大小。
* `cv2.imshow()`函数显示原始图像和均值滤波后的图像。
* `cv2.waitKey(0)`函数等待用户输入,按任意键退出。
* `cv2.destroyAllWindows()`函数关闭所有打开的窗口。
#### 2.2.2 中值滤波
中值滤波是一种非线性滤波器,它通过计算图像中每个像素周围邻域的中值来去除噪声。中值滤波可以有效去除椒盐噪声和脉冲噪声。
```python
import cv2
# 读取图像
image = cv2.imread('noisy_image.jpg')
# 进行中值滤波
median = cv2.medianBlur(image, 5)
# 显示原始图像和中值滤波后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Median Blurred Image', median)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.medianBlur(image, 5)`函数对输入图像`image`进行中值滤波,其中`5`参数指定滤波器核的大小。
* `cv2.imshow()`函数显示原始图像和中值滤波后的图像。
* `cv2.waitKey(0)`函数等待用户输入,按任意键退出。
* `cv2.destroyAllWindows()`函数关闭所有打开的窗口。
### 2.3 图像锐化
图像锐化技术旨在增强图像中边缘和细节的清晰度。锐化可以使图像看起来更清晰,并有助于突出重要的特征。
#### 2.3.1 拉普拉斯算子
拉普拉斯算子是一种二阶微分算子,它可以检测图像中的边缘和轮廓。拉普拉斯算子锐化通过计算图像中每个像素的拉普拉斯值,并将其添加到原始像素值中来实现。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 进行拉普拉斯锐化
laplacian = cv2.Laplacian(image, cv2.CV_64F)
laplacian = np.uint8(np.absolute(laplacian))
# 显示原始图像和拉普拉斯锐化后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Laplacian Sharpened Image', laplacian)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.Laplacian(image, cv2.CV_64F)`函数对输入图像`image`进行拉普拉斯锐化,其中`cv2.CV_64F`参数指定输出图像的数据类型。
* `np.uint8(np.absolute(laplacian))`函数将拉普拉斯值转换为无符号 8 位整数,以进行显示。
* `cv2.imshow()`函数显示原始图像和拉普拉斯锐化后的图像。
* `cv2.waitKey(0)`函数等待用户输入,按任意键退出。
* `cv2.destroyAllWindows()`函数关闭所有打开的窗口。
#### 2.3.2 Sobel算子
Sobel算子是一种一阶微分算子,它可以检测图像中的边缘和梯度。Sobel算子锐化通过计算图像中每个像素的 Sobel 导数,并将其添加到原始像素值中来实现。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 进行 Sobel 锐化
sobelx = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
sobely = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)
sobel = np.uint8(np.hypot(sobelx, sobely))
# 显示原始图像和 Sobel 锐化后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Sobel Sharpened Image', sobel)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)`函数对输入图像`image`进行 Sobel 锐化,其中`1`和`0`参数指定 x 方向导数,`ksize=5`参数指定滤波器核的大小。
* `cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize
# 3.1 图像缩放和旋转
图像缩放和旋转是图像变换技术中常用的操作,它们可以改变图像的大小和方向。
#### 3.1.1 插值方法
图像缩放时,需要使用插值方法来生成新的像素值。常用的插值方法包括:
- **最近邻插值:**使用最近的像素值作为新像素值。优点是计算简单,缺点是图像边缘会出现锯齿状。
- **双线性插值:**使用相邻的四个像素值加权平均作为新像素值。优点是比最近邻插值更平滑,缺点是计算量更大。
- **双三次插值:**使用相邻的 16 个像素值加权平均作为新像素值。优点是比双线性插值更平滑,缺点是计算量更大。
#### 3.1.2 旋转变换
图像旋转时,需要使用旋转矩阵来计算新的像素坐标。旋转矩阵如下:
```
[cos(theta) -sin(theta)]
[sin(theta) cos(theta)]
```
其中,`theta` 为旋转角度。
**代码示例:**
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 缩放图像
scaled_image = cv2.resize(image, (new_width, new_height), interpolation=cv2.INTER_LINEAR)
# 旋转图像
rotated_image = cv2.warpAffine(image, cv2.getRotationMatrix2D((image.shape[1] / 2, image.shape[0] / 2), theta, 1.0), (image.shape[1], image.shape[0]))
```
**逻辑分析:**
* `cv2.resize()` 函数用于缩放图像,`interpolation` 参数指定插值方法。
* `cv2.warpAffine()` 函数用于旋转图像,`getRotationMatrix2D()` 函数生成旋转矩阵。
### 3.2 图像仿射变换
图像仿射变换是一种线性变换,它可以将图像中的点从一个位置映射到另一个位置。仿射变换矩阵如下:
```
[a11 a12 a13]
[a21 a22 a23]
[a31 a32 a33]
```
其中,`a11`、`a12`、`a13`、`a21`、`a22`、`a23`、`a31`、`a32`、`a33` 为变换参数。
#### 3.2.1 平移变换
平移变换是一种特殊的仿射变换,它将图像中的所有点沿水平或垂直方向移动相同的距离。平移变换矩阵如下:
```
[1 0 tx]
[0 1 ty]
[0 0 1]
```
其中,`tx` 和 `ty` 为平移距离。
#### 3.2.2 缩放变换
缩放变换是一种特殊的仿射变换,它将图像中的所有点沿水平或垂直方向缩放相同的倍数。缩放变换矩阵如下:
```
[sx 0 0]
[0 sy 0]
[0 0 1]
```
其中,`sx` 和 `sy` 为缩放因子。
**代码示例:**
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 平移图像
translated_image = cv2.warpAffine(image, np.array([[1, 0, tx], [0, 1, ty], [0, 0, 1]]), (image.shape[1], image.shape[0]))
# 缩放图像
scaled_image = cv2.warpAffine(image, np.array([[sx, 0, 0], [0, sy, 0], [0, 0, 1]]), (image.shape[1], image.shape[0]))
```
**逻辑分析:**
* `cv2.warpAffine()` 函数用于执行仿射变换,`np.array()` 函数生成变换矩阵。
# 4. 图像分割技术**
图像分割是将图像划分为不同区域或对象的计算机视觉技术。它广泛应用于图像分析、目标检测和医学成像等领域。
**4.1 基于阈值的分割**
基于阈值的分割是一种简单的分割方法,它将像素值高于或低于阈值设为不同的区域。
**4.1.1 全局阈值法**
全局阈值法使用单个阈值将整个图像分割为前景和背景。它适用于具有明显对比度差异的图像。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 计算全局阈值
thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)[1]
# 显示分割结果
cv2.imshow('Segmented Image', thresh)
cv2.waitKey(0)
```
**4.1.2 局部阈值法**
局部阈值法使用自适应阈值,根据图像的局部区域计算阈值。它适用于对比度不均匀的图像。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 计算局部阈值
thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
# 显示分割结果
cv2.imshow('Segmented Image', thresh)
cv2.waitKey(0)
```
**4.2 基于区域的分割**
基于区域的分割将图像划分为具有相似属性(如颜色或纹理)的连通区域。
**4.2.1 连通分量分析**
连通分量分析识别图像中相邻的像素组,并将其标记为不同的区域。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用连通分量分析
num_labels, labels = cv2.connectedComponents(gray)
# 显示分割结果
segmented_image = np.zeros_like(image)
for label in range(1, num_labels):
segmented_image[labels == label] = (0, 255, 0)
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
```
**4.2.2 分水岭算法**
分水岭算法将图像视为地形,并使用分水岭线将不同的区域分隔开来。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用分水岭算法
markers = np.zeros_like(gray)
markers[gray < 128] = 1
markers[gray > 192] = 2
segmented_image = cv2.watershed(image, markers)
# 显示分割结果
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
```
**4.3 基于聚类的分割**
基于聚类的分割将图像中的像素聚类为不同的组,并将其分配给不同的区域。
**4.3.1 K-Means聚类**
K-Means聚类将图像中的像素聚类为K个组,其中K是预先定义的。
```python
import cv2
from sklearn.cluster import KMeans
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用K-Means聚类
kmeans = KMeans(n_clusters=3)
kmeans.fit(gray.reshape(-1, 1))
# 显示分割结果
segmented_image = np.zeros_like(image)
segmented_image[kmeans.labels_ == 0] = (0, 255, 0)
segmented_image[kmeans.labels_ == 1] = (0, 0, 255)
segmented_image[kmeans.labels_ == 2] = (255, 0, 0)
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
```
**4.3.2 Mean-Shift聚类**
Mean-Shift聚类是一种基于密度的聚类算法,它将图像中的像素聚类为具有相似颜色和空间位置的组。
```python
import cv2
from sklearn.cluster import MeanShift
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用Mean-Shift聚类
ms = MeanShift(bandwidth=10)
ms.fit(gray.reshape(-1, 1))
# 显示分割结果
segmented_image = np.zeros_like(image)
segmented_image[ms.labels_ == 0] = (0, 255, 0)
segmented_image[ms.labels_ == 1] = (0, 0, 255)
segmented_image[ms.labels_ == 2] = (255, 0, 0)
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
```
# 5. 图像特征提取技术**
图像特征提取是计算机视觉中至关重要的一步,它从图像中提取出具有代表性的信息,以便后续的识别、分类或其他分析任务。本章将介绍三种常用的图像特征提取技术:边缘检测、角点检测和纹理分析。
**5.1 边缘检测**
边缘是图像中亮度或颜色发生剧烈变化的区域,它们通常对应于对象的边界或轮廓。边缘检测算法旨在找到这些边缘并提取它们的位置和方向。
**5.1.1 Canny算子**
Canny算子是一种经典的边缘检测算法,它使用高斯滤波器平滑图像,然后使用Sobel算子计算图像梯度。通过对梯度幅值和方向进行非极大值抑制和阈值化,Canny算子可以产生清晰且连贯的边缘。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 高斯滤波
blurred_image = cv2.GaussianBlur(image, (5, 5), 0)
# 计算梯度
gradient_x = cv2.Sobel(blurred_image, cv2.CV_64F, 1, 0, ksize=5)
gradient_y = cv2.Sobel(blurred_image, cv2.CV_64F, 0, 1, ksize=5)
# 计算梯度幅值和方向
gradient_magnitude = cv2.magnitude(gradient_x, gradient_y)
gradient_direction = cv2.phase(gradient_x, gradient_y, angleInDegrees=True)
# 非极大值抑制
non_max_suppressed_image = cv2.dilate(gradient_magnitude, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)))
non_max_suppressed_image = cv2.erode(non_max_suppressed_image, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)))
# 阈值化
edges = cv2.threshold(non_max_suppressed_image, 100, 255, cv2.THRESH_BINARY)[1]
# 显示边缘图像
cv2.imshow('Edges', edges)
cv2.waitKey(0)
```
**5.1.2 Sobel算子**
Sobel算子是一种简单但有效的边缘检测算法,它使用两个3x3卷积核分别计算图像的水平和垂直梯度。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 计算梯度
gradient_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
gradient_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值和方向
gradient_magnitude = cv2.magnitude(gradient_x, gradient_y)
gradient_direction = cv2.phase(gradient_x, gradient_y, angleInDegrees=True)
# 阈值化
edges = cv2.threshold(gradient_magnitude, 100, 255, cv2.THRESH_BINARY)[1]
# 显示边缘图像
cv2.imshow('Edges', edges)
cv2.waitKey(0)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 OpenCV 物体识别技术,涵盖其原理、优势和局限性。它提供了图像预处理技巧,以提高识别准确率,并介绍了性能优化技术,以加速识别速度。专栏还探讨了 OpenCV 物体识别在医疗、安防、零售、自动驾驶、机器人、教育、科研等领域的广泛应用。此外,它还介绍了性能评估指标、数据集、开源库以及与其他识别技术的比较,为读者提供了全面了解 OpenCV 物体识别技术的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【软件管理系统设计全攻略】:从入门到架构的终极指南
# 摘要
随着信息技术的飞速发展,软件管理系统成为支持企业运营和业务创新的关键工具。本文从概念解析开始,系统性地阐述了软件管理系统的需求分析、设计、数据设计、开发与测试、部署与维护,以及未来的发展趋势。重点介绍了系统需求分析的方法论、系统设计的原则与架构选择、数据设计的基础与高级技术、以及质量保证与性能优化。文章最后
【硬盘修复的艺术】:西数硬盘检测修复工具的权威指南(全面解析WD-L_WD-ROYL板支持特性)
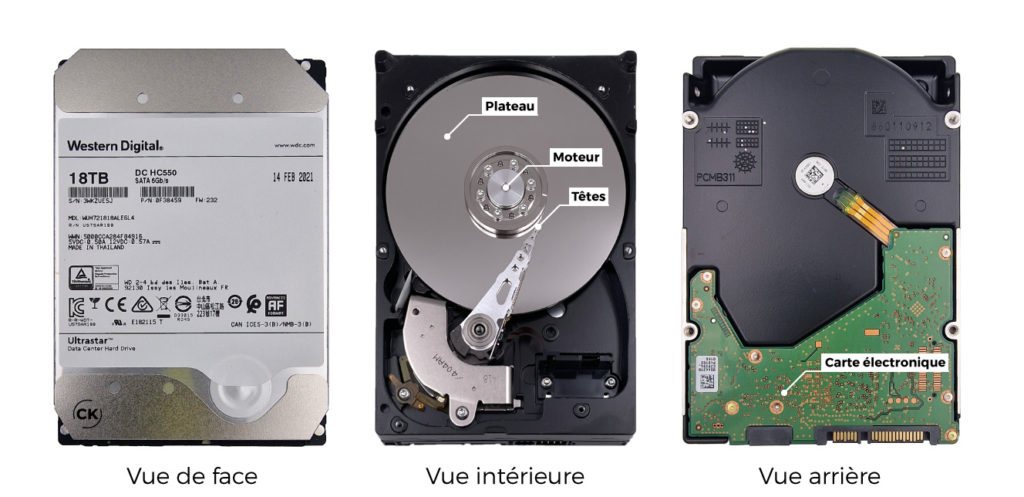
# 摘要
本文深入探讨了硬盘修复的基础知识,并专注于西部数据(西数)硬盘的检测修复工具。首先介绍了西数硬盘的内部结构与工作原理,随后阐述了硬盘故障的类型及其原因,包括硬件与软件方面的故障。接着,本文详细说明了西数硬盘检测修复工具的检测和修复理论基础,以及如何实践安装、配置和
【sCMOS相机驱动电路信号完整性秘籍】:数据准确性与稳定性并重的分析技巧

# 摘要
本文针对sCMOS相机驱动电路信号完整性进行了系统的研究。首先介绍了信号完整性理论基础和关键参数,紧接着探讨了信号传输理论,包括传输线理论基础和高频信号传输问题,以及信号反射、串扰和衰减的理论分析。本文还着重分析了电路板布局对信号完整性的影响,提出布局优化策略以及高速数字电路的布局技巧。在实践应用部分,本文提供了信号完整性测试工具的选择,仿真软件的应用,
能源转换效率提升指南:DEH调节系统优化关键步骤
# 摘要
能源转换效率对于现代电力系统至关重要,而数字电液(DEH)调节系统作为提高能源转换效率的关键技术,得到了广泛关注和研究。本文首先概述了DEH系统的重要性及其基本构成,然后深入探讨了其理论基础,包括能量转换原理和主要组件功能。在实践方法章节,本文着重分析了DEH系统的性能评估、参数优化调整,以及维护与故障排除策略。此外,本文还介绍了DEH调节系统的高级优化技术,如先进控制策略应用、系统集成与自适应技术,并讨论了节能减排的实现方法。最后,本文展望了DEH系统优化的未来趋势,包括技术创新、与可再生能源的融合以及行业标准化与规范化发展。通过对DEH系统的全面分析和优化技术的研究,本文旨在为提
【AT32F435_AT32F437时钟系统管理】:精确控制与省电模式

# 摘要
本文系统性地探讨了AT32F435/AT32F437微控制器中的时钟系统,包括其基本架构、配置选项、启动与同步机制,以及省电模式与能效管理。通过对时钟系统的深入分析,本文强调了在不同应用场景中实现精确时钟控制与测量的重要性,并探讨了高级时钟管理功能。同时,针对时钟系统的故障预防、安全机制和与外围设备的协同工作进行了讨论。最后,文章展望了时
【MATLAB自动化脚本提升】:如何利用数组方向性优化任务效率
# 摘要
本文深入探讨MATLAB自动化脚本的构建与优化技术,阐述了MATLAB数组操作的基本概念、方向性应用以及提高脚本效率的实践案例。文章首先介绍了MATLAB自动化脚本的基础知识及其优势,然后详细讨论了数组操作的核心概念,包括数组的创建、维度理解、索引和方向性,以及方向性在数据处理中的重要性。在实际应用部分,文章通过案例分析展示了数组方向性如何提升脚本效率,并分享了自动化
现代加密算法安全挑战应对指南:侧信道攻击防御策略
# 摘要
侧信道攻击利用信息泄露的非预期通道获取敏感数据,对信息安全构成了重大威胁。本文全面介绍了侧信道攻击的理论基础、分类、原理以及实际案例,同时探讨了防御措施、检测技术以及安全策略的部署。文章进一步分析了侧信道攻击的检测与响应,并通过案例研究深入分析了硬件和软件攻击手段。最后,本文展望了未来防御技术的发展趋势,包括新兴技术的应用、政策法规的作用以及行业最佳实践和持续教育的重要性。
# 关键字
侧信道攻击;信息安全;防御措施;安全策略;检测技术;防御发展趋势
参考资源链接:[密码编码学与网络安全基础:对称密码、分组与流密码解析](https://wenku.csdn.net/doc/64
【科大讯飞语音识别技术完全指南】:5大策略提升准确性与性能
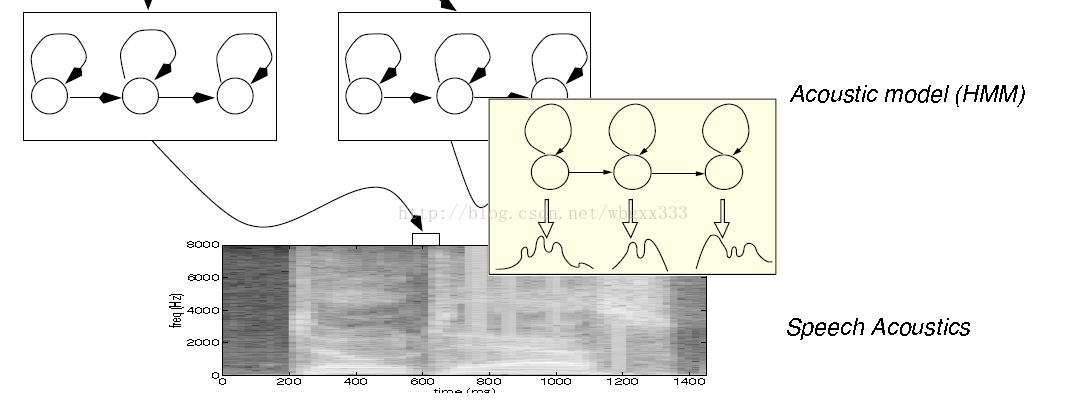
# 摘要
本论文综述了语音识别技术的基础知识和面临的挑战,并着重分析了科大讯飞在该领域的技术实践。首先介绍了语音识别技术的原理,包括语音信号处理基础、自然语言处理和机器学习的应用。随
【现场演练】:西门子SINUMERIK测量循环在多样化加工场景中的实战技巧
# 摘要
本文旨在全面介绍西门子SINUMERIK测量循环的理论基础、实际应用以及优化策略。首先概述测量循环在现代加工中心的重要作用,继而深入探讨其理论原理,包括工件测量的重要性、测量循环参数设定及其对工件尺寸的影响。文章还详细分析了测量循环在多样化加工场景中的应用,特别是在金属加工和复杂形状零件制造中的挑战,并提出相应的定制方案和数据处理方法。针对多轴机床的测量循环适配,探讨了测量策略和同步性问题。此外,本文还探讨了测量循环的优化方法、提升精确度的技巧,以及西门子SINUMERIK如何融合新兴测量技术。最后,本文通过综合案例分析与现场演练,强调了理论与实践的结合,并对未来智能化测量技术的发展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )