OpenCV图像处理中的USB摄像头应用:图像分割与目标检测的实用指南
发布时间: 2024-08-09 00:56:31 阅读量: 23 订阅数: 24 
# 1. OpenCV图像处理概述**
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,广泛用于图像处理、计算机视觉和机器学习领域。它提供了丰富的函数和算法,可用于图像采集、预处理、分割、检测和识别等任务。
OpenCV具有以下特点:
- **跨平台支持:**支持Windows、Linux、macOS等多个平台。
- **易于使用:**提供Python、C++等多种编程语言的接口。
- **功能强大:**涵盖图像处理、计算机视觉和机器学习的广泛功能。
# 2. USB摄像头图像采集与预处理
### 2.1 USB摄像头连接和初始化
#### 摄像头连接
USB摄像头连接到计算机的USB端口后,系统会自动识别并安装相应的驱动程序。在Linux系统中,可以通过`lsusb`命令查看已连接的USB设备,并通过`dmesg`命令查看设备连接和初始化的详细信息。
#### 摄像头初始化
在OpenCV中,可以使用`VideoCapture`类来初始化摄像头。`VideoCapture`类的构造函数需要传入摄像头的索引号或设备路径。例如,以下代码初始化第一个USB摄像头:
```cpp
VideoCapture cap(0);
```
如果摄像头初始化成功,`cap.isOpened()`将返回`True`,否则返回`False`。
### 2.2 图像采集和格式转换
#### 图像采集
使用`VideoCapture`类的`read()`方法可以采集摄像头帧。`read()`方法返回一个布尔值,表示是否成功采集到帧,以及一个`Mat`对象,其中包含采集到的帧。
```cpp
Mat frame;
cap >> frame;
```
#### 格式转换
采集到的帧通常是BGR格式的,而OpenCV中大多数图像处理算法需要RGB格式的图像。因此,需要将帧转换为RGB格式。可以使用`cvtColor()`函数进行格式转换:
```cpp
cvtColor(frame, frame, COLOR_BGR2RGB);
```
### 2.3 图像预处理:降噪、增强和分割
#### 降噪
图像降噪可以去除图像中的噪声,提高图像质量。OpenCV提供了多种降噪算法,例如均值滤波、中值滤波和高斯滤波。
```cpp
// 均值滤波
blur(frame, frame, Size(3, 3));
// 中值滤波
medianBlur(frame, frame, 3);
// 高斯滤波
GaussianBlur(frame, frame, Size(3, 3), 0);
```
#### 增强
图像增强可以改善图像的对比度、亮度和饱和度。OpenCV提供了多种图像增强算法,例如直方图均衡化、伽马校正和锐化。
```cpp
// 直方图均衡化
equalizeHist(frame, frame);
// 伽马校正
gammaCorrection(frame, frame, 2.0);
// 锐化
Laplacian(frame, frame, CV_16S);
convertScaleAbs(frame, frame);
```
#### 分割
图像分割将图像分割成不同的区域或对象。OpenCV提供了多种图像分割算法,例如阈值分割、区域分割和分水岭算法。
```cpp
// 阈值分割
threshold(frame, frame, 127, 255, THRESH_BINARY);
// 区域分割
Mat labels, stats, centroids;
connectedComponentsWithStats(frame, labels, stats, centroids);
// 分水岭算法
watershed(frame, markers);
```
# 3. 图像分割理论与实践**
### 3.1 图像分割算法概述
图像分割是将图像划分为具有不同特征的区域的过程,是图像处理中的基本操作之一。其目的是将图像中感兴趣的目标从背景中分离出来,为后续的分析和处理提供基础。图像分割算法根据其原理和方法可以分为以下几类:
- **基于阈值的分割:**将图像像素灰度值与阈值进行比较,将大于阈值的像素归为目标,小于阈值的像素归为背景。
- **基于区域的分割:**将图像像素聚类为具有相似特征的区域,然后将这些区域合并为目标。
- **基于边缘的分割:**检测图像中的边缘,然后根据边缘将图像分割为不同的区域。
- **基于深度学习的分割:**利用深度学习模型对图像进行语义分割,将图像像素分类为不同的目标类别。
### 3.2 基于阈值的分割:二值化、Otsu阈值
**二值化分割**是基于阈值的最简单分割算法,将图像像素灰度值与一个固定阈值进行比较,大于阈值的像素设为白色(255),小于阈值的像素设为黑色(0)。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 二值化分割
threshold = 127
binary_image = cv2.threshold(image, threshold, 255, cv2.THRESH_BINARY)[1]
# 显示分割后的图像
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
```
**Otsu阈值分割**是一种自动阈值选择算法,通过最大化目标和背景像素类间方差来确定最佳阈值。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# Otsu阈值分割
threshold, binary_image = cv2.threshold(image, 0, 255, cv2.THRESH_OTSU)
# 显示分割后的图像
cv2.imshow('Otsu Binary Image', binary_image)
cv2.waitKey(0)
```
### 3.3 基于区域的分割:连通域分析、分水岭算法
**连通域分析**将具有相同灰度值的相邻像素聚类为连通域,然后将这些连通域合并为目标。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 连通域分析
num_labels, labels_image = cv2.connectedComponents(gray_image)
# 显示分割后的图像
segmented_image = cv2.applyColorMap(labels_image, cv2.COLORMAP_JET)
cv2.imshow('Connected Components Image', segmented_image)
cv2.waitKey(0)
```
**分水岭算法**将图像视为地形,将像素灰度值视为高度,然后通过模拟水流淹没地形来分割图像。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 分水岭算法
markers = cv2.watershed(gray_image, None)
# 显示分割后的图像
segmented_image = cv2.applyColorMap(markers, cv2.COLORMAP_JET)
cv2.imshow('Watershed Ima
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 OpenCV 中 USB 摄像头的图像处理技术,涵盖从基础到前沿的广泛主题。通过一系列文章,专栏揭秘了 10 个性能优化技巧,提供了图像采集和处理的权威指南,并介绍了 5 个高级技术以提升图像处理能力。此外,专栏还提供了 3 个常见问题的快速解决指南,深入探索了图像增强、降噪、分割、目标检测、配准、拼接、分类、识别、分析和可视化的技术。通过理论和实践相结合,专栏旨在帮助读者掌握图像处理的核心技术,解决常见问题,并充分利用 OpenCV 中 USB 摄像头的图像处理功能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
贝叶斯方法与ANOVA:统计推断中的强强联手(高级数据分析师指南)
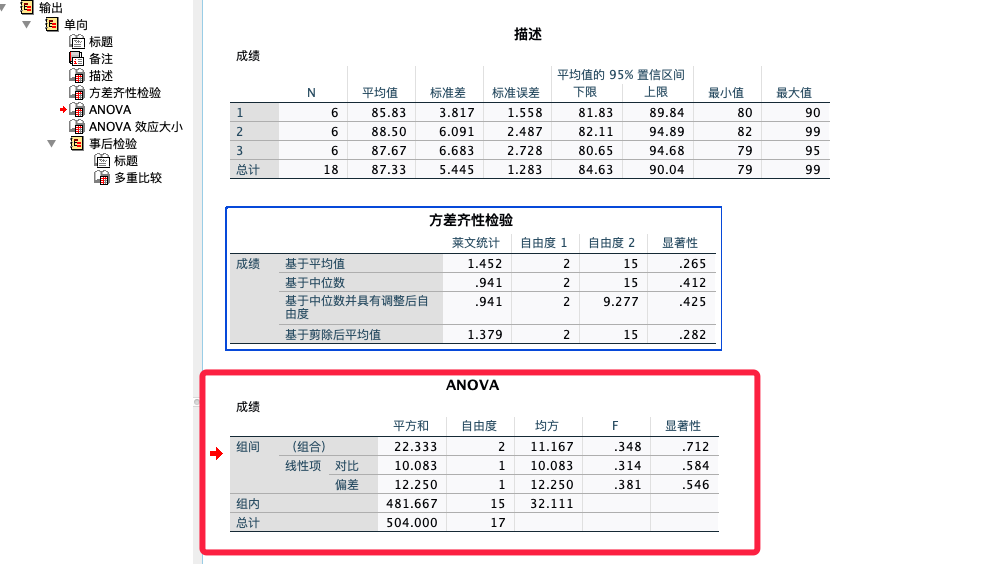
# 1. 贝叶斯统计基础与原理
在统计学和数据分析领域,贝叶斯方法提供了一种与经典统计学不同的推断框架。它基于贝叶斯定理,允许我们通过结合先验知识和实际观测数据来更新我们对参数的信念。在本章中,我们将介绍贝叶斯统计的基础知识,包括其核心原理和如何在实际问题中应用这些原理。
## 1.1 贝叶斯定理简介
贝叶斯定理,以英国数学家托马斯·贝叶斯命名
机器学习中的变量转换:改善数据分布与模型性能,实用指南
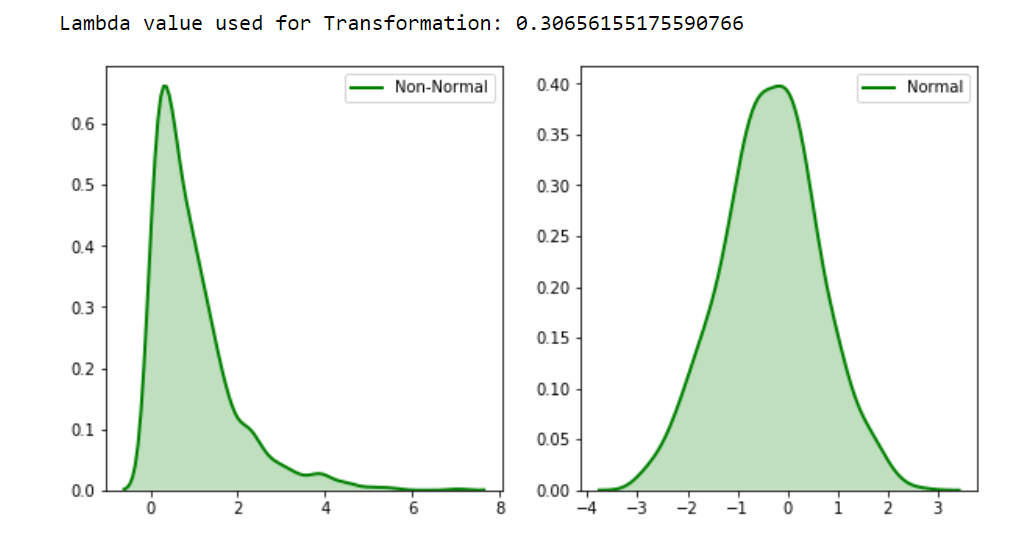
# 1. 机器学习与变量转换概述
## 1.1 机器学习的变量转换必要性
在机器学习领域,变量转换是优化数据以提升模型性能的关键步骤。它涉及将原始数据转换成更适合算法处理的形式,以增强模型的预测能力和稳定性。通过这种方式,可以克服数据的某些缺陷,比如非线性关系、不均匀分布、不同量纲和尺度的特征,以及处理缺失值和异常值等问题。
## 1.2 变量转换在数据预处理中的作用
【金融风险管理案例】:卡方检验在风险模型中的实战应用

# 1. 金融风险管理与卡方检验概念
金融风险管理是金融机构为了降低不良贷款、市场波动等带来的负面影响,而采取的一系列决策和策略。作为统计学中的一种假设检验方法,卡方检验在风险管理中扮演了重要角色,尤其在对分类数据进行独立性检验时,它能有效地识别和量化变量之间的关系。卡方检验使风险管理人员能够在一定程度上了解不同因素对风险的潜在影响,从而做出更加精准的风险决策。随着金
图像处理中的正则化应用:过拟合预防与泛化能力提升策略
# 1. 图像处理与正则化概念解析
在现代图像处理技术中,正则化作为一种核心的数学工具,对图像的解析、去噪、增强以及分割等操作起着至关重要
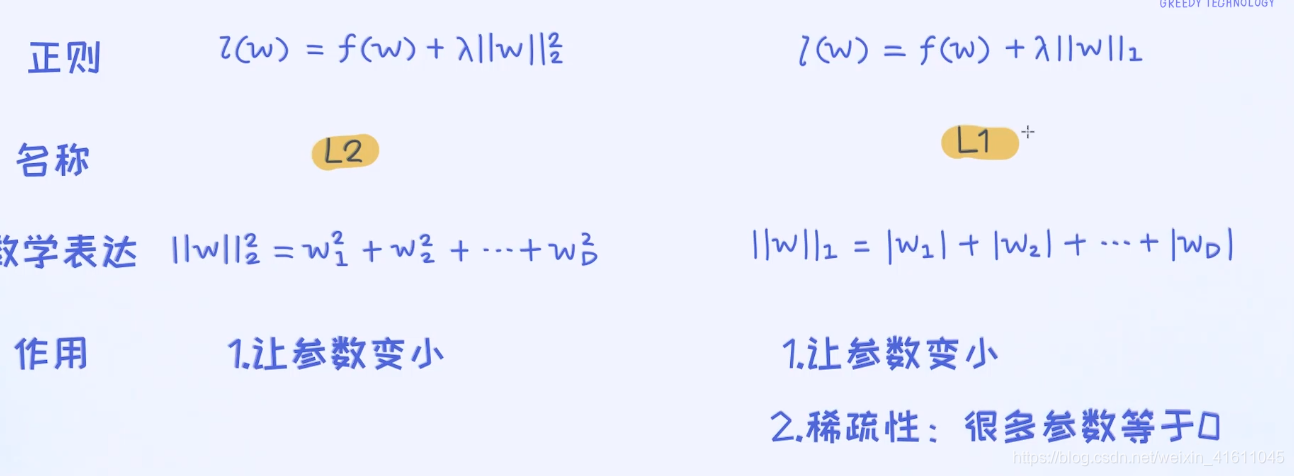
推荐系统中的L2正则化:案例与实践深度解析
# 1. L2正则化的理论基础
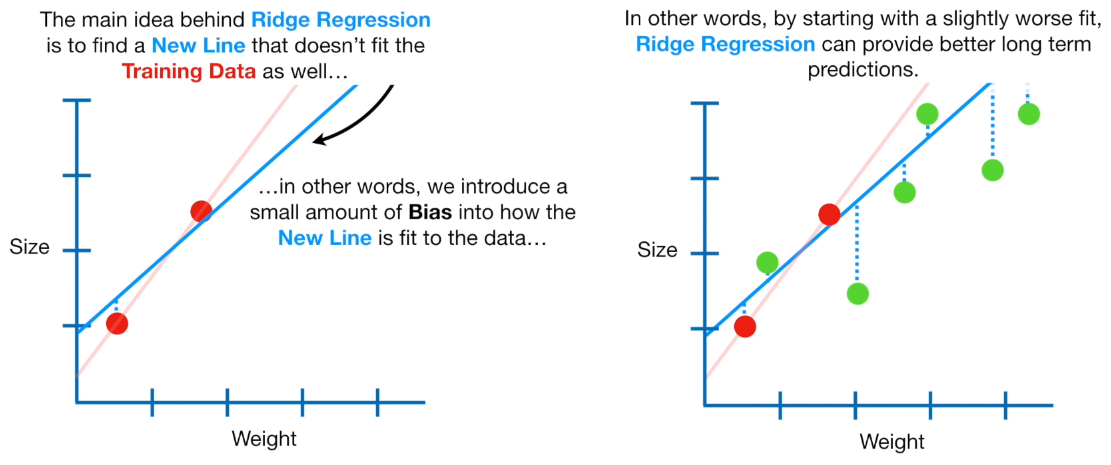
在机器学习与深度学习模型中,正则化技术是避免过拟合、提升泛化能力的重要手段。L2正则化,也称为岭回归(Ridge Regression)或权重衰减(Weight Decay),是正则化技术中最常用的方法之一。其基本原理是在损失函数中引入一个附加项,通常为模型权重的平方和乘以一个正则化系数λ(lambda)。这个附加项对大权重进行惩罚,促使模型在训练过程中减小权重值,从而达到平滑模型的目的。L2正则化能够有效地限制模型复
预测建模精准度提升:贝叶斯优化的应用技巧与案例

# 1. 贝叶斯优化概述
贝叶斯优化是一种强大的全局优化策略,用于在黑盒参数空间中寻找最优解。它基于贝叶斯推理,通过建立一个目标函数的代理模型来预测目标函数的性能,并据此选择新的参数配置进行评估。本章将简要介绍贝叶斯优化的基本概念、工作流程以及其在现实世界
大规模深度学习系统:Dropout的实施与优化策略
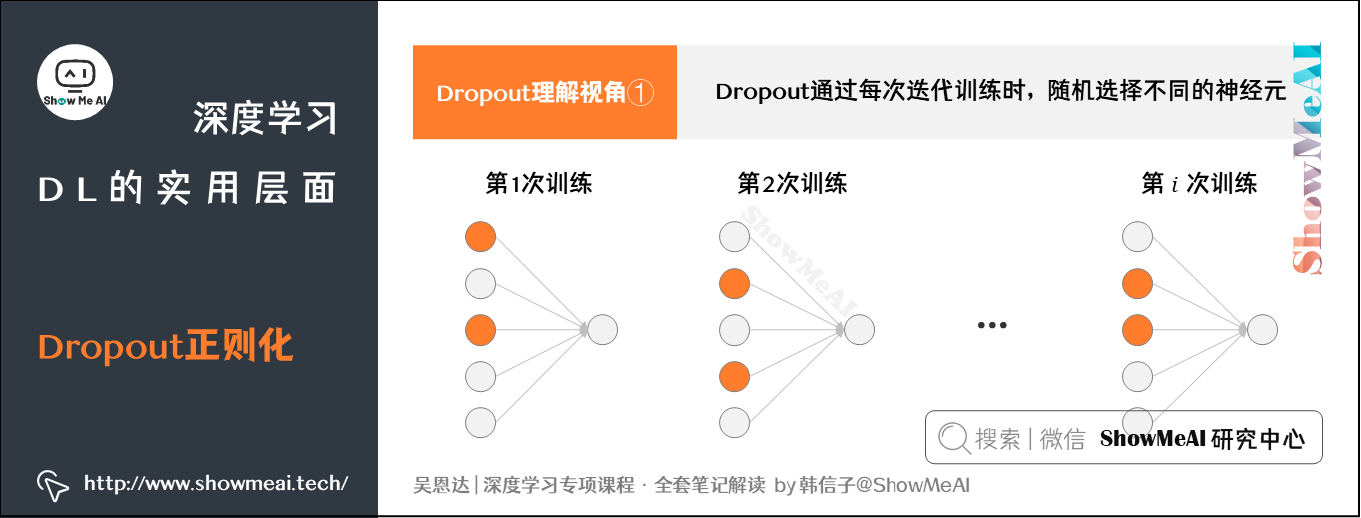
# 1. 深度学习与Dropout概述
在当前的深度学习领域中,Dropout技术以其简单而强大的能力防止神经网络的过拟合而著称。本章旨在为读者提供Dropout技术的初步了解,并概述其在深度学习中的重要性。我们将从两个方面进行探讨:
首先,将介绍深度学习的基本概念,明确其在人工智能中的地位。深度学习是模仿人脑处理信息的机制,通过构建多层的人工神经网络来学习数据的高层次特征,它已
【Lasso回归与岭回归的集成策略】:提升模型性能的组合方案(集成技术+效果评估)
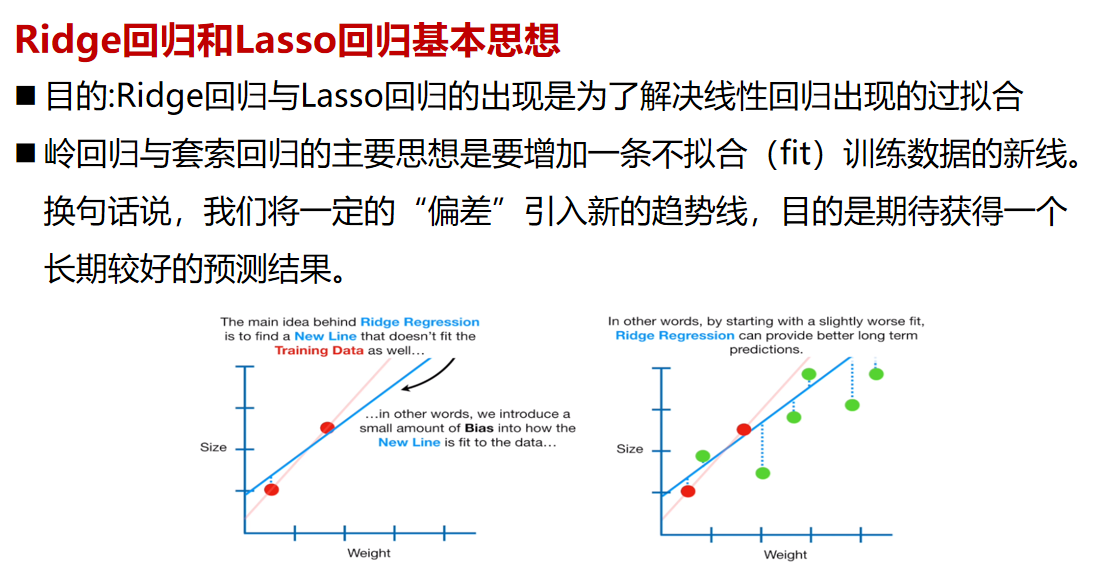
# 1. Lasso回归与岭回归基础
## 1.1 回归分析简介
回归分析是统计学中用来预测或分析变量之间关系的方法,广泛应用于数据挖掘和机器学习领域。在多元线性回归中,数据点拟合到一条线上以预测目标值。这种方法在有多个解释变量时可能会遇到多重共线性的问题,导致模型解释能力下降和过度拟合。
## 1.2 Lasso回归与岭回归的定义
Lasso(Least
自然语言处理中的过拟合与欠拟合:特殊问题的深度解读
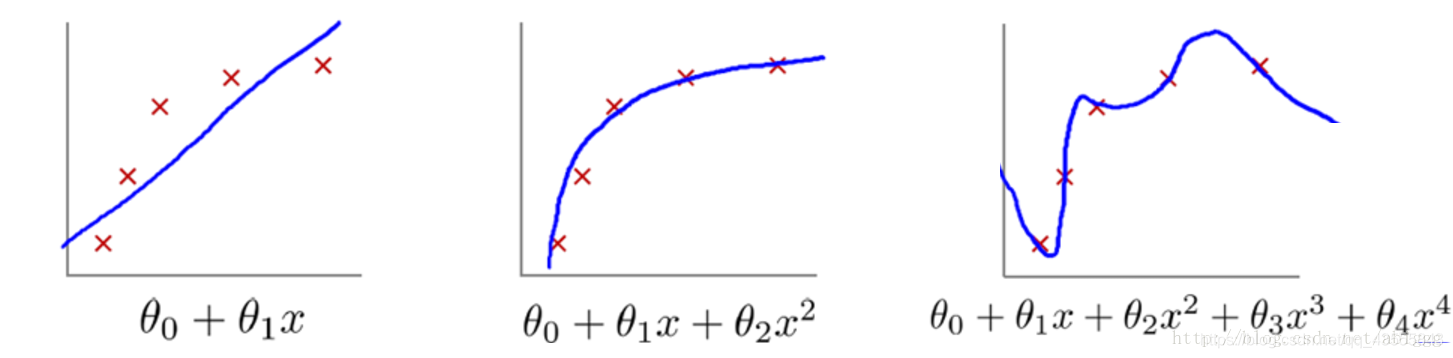
# 1. 自然语言处理中的过拟合与欠拟合现象
在自然语言处理(NLP)中,过拟合和欠拟合是模型训练过程中经常遇到的两个问题。过拟合是指模型在训练数据上表现良好
随机搜索在强化学习算法中的应用

# 1. 强化学习算法基础
强化学习是一种机器学习方法,侧重于如何基于环境做出决策以最大化某种累积奖励。本章节将为读者提供强化学习算法的基础知识,为后续章节中随机搜索与强化学习结合的深入探讨打下理论基础。
## 1.1 强化学习的概念和框架
强化学习涉及智能体(Agent)与环境(Environment)之间的交互。智能体通过执行动作(Action)影响环境,并根据环境的反馈获得奖
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )