STM32F405RGT6项目实战:从零开始的全周期开发流程
发布时间: 2024-12-15 09:28:33 阅读量: 2 订阅数: 4 
参考资源链接:[STM32F405RGT6中文参考手册:Cortex-M4 MCU详解](https://wenku.csdn.net/doc/6401ad30cce7214c316ee9da?spm=1055.2635.3001.10343)
# 1. STM32F405RGT6概览与开发环境搭建
## 1.1 STM32F405RGT6引言
STM32F405RGT6作为STMicroelectronics推出的高性能ARM Cortex-M4微控制器,广泛应用于各种嵌入式系统。它以其卓越的性能和丰富的外设接口成为了许多项目和产品的核心。
## 1.2 开发环境搭建
开发STM32F405RGT6需要准备以下环境:
- **硬件**:STM32F405RGT6开发板、USB转串口模块等。
- **软件**:STM32CubeMX配置工具、Keil uVision IDE、STM32驱动安装包、ST-Link驱动程序。
执行步骤如下:
1. **安装IDE与工具链**:
- 下载Keil uVision5最新版。
- 安装Keil uVision并导入对应的STM32库文件。
2. **连接开发板与电脑**:
- 使用USB线连接电脑和开发板上的ST-Link接口。
- 确保已安装正确的ST-Link驱动。
3. **使用STM32CubeMX生成项目代码**:
- 启动STM32CubeMX并创建新项目。
- 选择STM32F405RGT6 MCU,配置必要的外设和参数。
- 点击生成代码,导出到Keil uVision。
通过以上步骤,即可完成开发环境的搭建,为后续开发与调试工作奠定基础。
# 2. STM32F405RGT6硬件基础与接口编程
## 2.1 STM32F405RGT6硬件架构详解
### 2.1.1 核心处理单元与内存布局
STM32F405RGT6基于ARM Cortex-M4核心,其处理速度高达168 MHz,具有浮点运算单元(FPU)和DSP指令集,为复杂运算和信号处理提供强有力支持。核心架构采用哈佛架构,包含独立的数据和指令总线,以实现高效的指令流水线。
内存布局上,STM32F405RGT6拥有256KB的Flash存储器用于程序代码和静态数据,以及32KB的SRAM用于运行时数据存储。它还包含一个灵活的静态存储控制器(FSMC),支持各种外部存储器接口,使得扩展内存变得非常方便。
### 2.1.2 外设接口与功能模块
STM32F405RGT6具有广泛的外设接口,包括多通道的高级控制定时器、串行通信接口、模数/数模转换器(ADC/DAC)、以及USB OTG接口等。这些功能模块不仅支持多样化的外设连接,还提供多种通信协议的实现,使得开发者能够构建复杂的嵌入式系统。
STM32的外设接口通常包含以下几大类:
- **通信接口**:包括UART、SPI、I2C等,用于实现点对点或网络化的通信。
- **定时器**:具有编码器接口模式和脉冲宽度调制(PWM)输出能力,支持复杂的定时操作。
- **模拟外设**:包括多通道ADC和DAC,可以实现高精度的数据采集与控制。
- **电源管理**:有多种电源模式和睡眠模式,有利于实现低功耗设计。
## 2.2 接口编程基础
### 2.2.1 GPIO编程与应用实例
通用输入输出(GPIO)引脚是微控制器与外界交互的基础。在STM32F405RGT6中,几乎所有的外设接口都是通过GPIO引脚来实现的。GPIO编程首先要初始化GPIO端口,然后根据需要配置引脚的模式(输入、输出、复用功能或模拟模式)和输出类型(推挽或开漏)。
#### 代码示例:
```c
#include "stm32f4xx.h"
void GPIO_Configuration(void) {
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOB端口的时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
// 配置GPIOB的第0号引脚为推挽输出模式,速度为100MHz
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
int main(void) {
// 系统初始化
SystemInit();
// 配置GPIO
GPIO_Configuration();
while(1) {
// 在这里编写应用逻辑代码
}
}
```
### 2.2.2 ADC和DAC接口编程
STM32F405RGT6的ADC模块具备出色的性能,拥有多个通道,支持多种分辨率和采样速率,适合各种模拟信号的采集。DAC则允许微控制器输出模拟信号,常用于控制电子设备如电机驱动器。
#### ADC接口编程示例:
```c
#include "stm32f4xx.h"
void ADC_Configuration(void) {
ADC_ChannelConfTypeDef sConfig;
ADC_HandleTypeDef hadc;
// 使能ADC1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
// ADC初始化结构体配置
hadc.Instance = ADC1;
hadc.Init.ClockPrescaler = ADC_Prescaler_Div2;
hadc.Init.Resolution = ADC_Resolution_12b;
hadc.Init.ScanConvMode = DISABLE;
hadc.Init.ContinuousConvMode = ENABLE;
hadc.Init.DiscontinuousConvMode = DISABLE;
hadc.Init.ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;
hadc.Init.DataAlign = ADC_DataAlign_Right;
hadc.Init.NbrOfConversion = 1;
HAL_ADC_Init(&hadc);
// 配置ADC通道
sConfig.Channel = ADC_Channel_0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SamplingTime_3Cycles;
HAL_ADC_ConfigChannel(&hadc, &sConfig);
}
int main(void) {
// 系统初始化
SystemInit();
// 配置ADC
ADC_Configuration();
while(1) {
// 启动转换
HAL_ADC_Start(&hadc);
// 等待转换完成
HAL_ADC_PollForConversion(&hadc, HAL_MAX_DELAY);
// 读取转换结果
uint32_t adcValue = HAL_ADC_GetValue(&hadc);
}
}
```
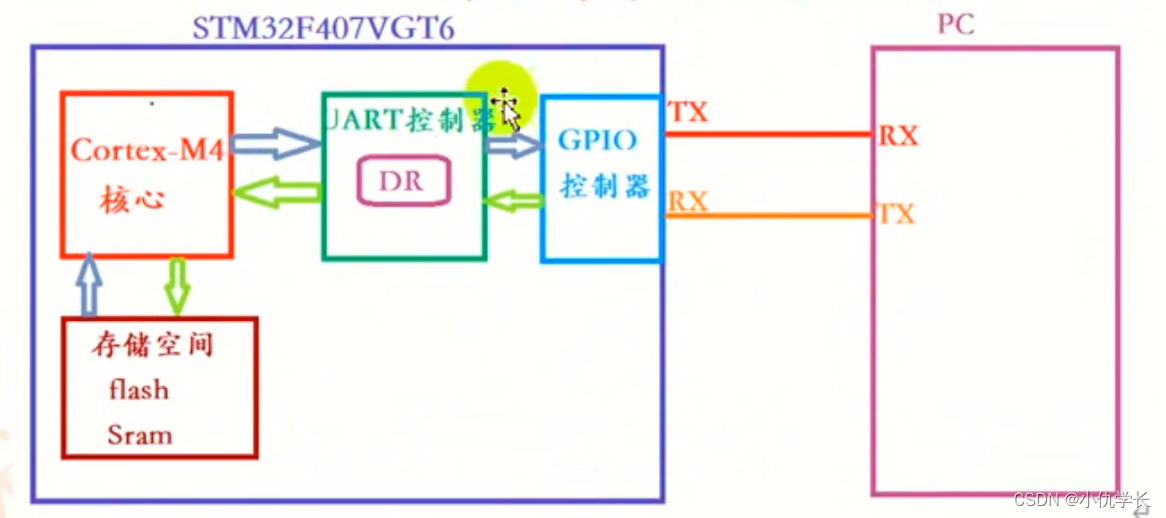
### 2.2.3 UART通信编程与调试
通用异步收发传输器(UART)是微控制器中常用的通信接口,用于实现微控制器与PC或其他串行设备的数据交换。
#### UART通信编程示例:
```c
#include "stm32f4xx.h"
void UART_Configuration(void) {
USART_HandleTypeDef huart;
// 使能UART4时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART4, ENABLE);
// UART初始化结构体配置
huart.Instance = USART4;
huart.Init.BaudRate = 9600;
huart.Init.WordLength = USART_WordLength_8b;
huart.Init.StopBits = USART_StopBits_1;
huart.Init.Parity = USART_Parity_No;
huart.Init.Mode = USART_Mode_Rx | USART_Mode_Tx;
huart.Init.HwFlowCtl = USART_HwFlowCtl_None;
HAL_USART_Init(&huart);
}
int main(void) {
// 系统初始化
SystemInit();
// 配置UART
UART_Configuration();
while(1) {
// 发送数据
char *msg = "Hello World!\r\n";
HAL_USART_Transmit(&huart, (uint8_t*)msg, strlen(msg), HAL_MAX_DELAY);
}
}
```
## 2.3 中断系统与定时器编程
### 2.3.1 中断机制的工作原理
STM32F405RGT6的中断系统是基于ARM Cortex-M4内核的NVIC(嵌套向量中断控制器)实现的。中断机制允许微控制器在执行主程序任务时,能够响应外

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供有关 STM32F405RGT6 微控制器的全面中文指南。从基础硬件和软件配置到高级编程技巧,再到外设接口、时钟和电源优化,本专栏涵盖了您需要了解的方方面面。您将学习如何优化核心架构和资源管理,掌握 Cortex-M4 指令集,探索从 GPIO 到高级通信接口的外设接口,并了解功耗控制的高级技巧。此外,本专栏还深入探讨了通信协议实现、触摸和显示控制、内存管理、异常处理、调试和测试、多任务编程、物联网解决方案以及项目实战。通过本专栏,您将获得全面了解 STM32F405RGT6 微控制器,并提升您的嵌入式系统开发技能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
CEC05基准测试深度解析:算法优化的黄金标准

参考资源链接:[CEC2005真实参数优化测试函数与评估标准](https://wenku.csdn.net/doc/ewbym81paf?spm=1055.2635.3001.10343)
# 1. CEC05基准测试概述
## 简介
CEC05基准测试是业界广泛认可的性能
【PyCharm模块安装正确方式】:不再让模块缺失成为ImportError的借口

参考资源链接:[pycharm运行出现ImportError:No module named的解决方法](https://wenku.csdn.net/doc/6412b6dbbe7fbd1778d483be?spm=1055.2635.3001.10343)
# 1. PyCharm与Python模块管理
在现代软件开发中,集成开发环境(IDE)已经成为提高开发效率不
流体动力学模拟新视角:Tetgen应用案例深度剖析
参考资源链接:[tetgen中文指南:四面体网格生成与优化](https://wenku.csdn.net/doc/77v5j4n744?spm=1055.2635.3001.10343)
# 1. 流体动力学模拟的基础知识
流体动力学模拟是现代工程设计和科研中不可或缺的一部分。了解其基础知识对于深入研究和应用各类模拟软件至关重要。在本
印刷行业术语大辞典:覆盖从基础到高级的中英文词汇(术语通识课)

参考资源链接:[印刷术语大全:中英文对照与专业解析](https://wenku.csdn.net/doc/1y36sp606t?spm=1055.2635.3001.10343)
# 1. 印刷行业术语概览
印刷行业拥有自己独特的专业术语体系,对于初入行者来说,理解和掌握这些术语是理解印刷工艺和沟通交流的基础。本章将为读者提供印刷行业中常见的
【硬件设计中的代码规范守护者】:EETOP.cn SpyGlass LintRules应用详解
参考资源链接:[SpyGlass Lint规则参考指南:P-2019.06-SP1](https://wenku.csdn.net/doc/5y956iqsgn?spm=1055.2635.3001.10343)
# 1. 硬件设计与代码规范的重要性
在现代信息技术飞速发展的背景下,硬件设计的复杂性不断增加,同时对代码质量和设计的可维护性也提出了更高的要求。本章将探讨硬件设计与代码规范
Python并发编程大揭秘:多线程与多进程的实战指南
参考资源链接:[头歌Python实践:顺序结构与复数运算解析](https://wenku.csdn.net/doc/ov1zuj84kh?spm=1055.2635.3001.10343)
# 1. 并发编程基础理论
## 1.1 并发编程的定义与重要性
并发编程是计算机科学中一个关键的领域,它涉及到如何设计和编写程序,以同时处理多个任务,提高资源利用率和程序效率。这种编程范式在多核处理器上尤为重
六西格玛测量系统分析:方法论详解,提升测量准确性
参考资源链接:[六西格玛管理精华概览:从起源到战略应用](https://wenku.csdn.net/doc/646194bb5928463033b19ffc?spm=1055.2635.3001.10343)
# 1. 六西格玛测量系统分析概述
在当今竞争激烈的商业环境中,质量被视为企业成功的关键因素。六西格玛作为一种旨在通过持续
数字滤波器设计实战:从理论到应用的完整转化
参考资源链接:[《数字信号处理》第三版课后答案解析](https://wenku.csdn.net/doc/12dz9ackpy?spm=1055.2635.3001.10343)
# 1. 数字滤波器的基本概念和原理
数字滤波器作为数字信号处理中的核心组件,在电子设备中扮演着至关重要的角色。它们通过算法来处理信号,以实现信号的过滤、增强、或变换。数字滤波器的基本原理是利用数学运算来改变
数字通信深度剖析:15个案例揭示调制解调的奥秘,让你的应用更流畅

参考资源链接:[9ku文库_数字通信第五版答案_数字通信第五版习题及答案完整版.pdf](https://wenku.csdn.net/doc/4mxpsvzwxh?spm=1055.2635.3001.10343)
# 1. 数字通信基础与调制解调原理
在数字化浪潮中,数字通信技术的核心在于调制解调原理的应用。本章将带领读者探索数字通信的基础知识,并深入解析调制
避免常见陷阱,成为硬件设计专家
参考资源链接:[PR2000K_AHD转MIPI调试原理图.pdf](https://wenku.csdn.net/doc/645d9a0995996c03ac437fcb?spm=1055.2635.3001.10343)
# 1. 硬件设计的理论基础和原则
## 1.1 硬件设计概述
硬件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )