数字信号处理系统设计指南:工程实现的PPT课件要点
发布时间: 2024-12-16 20:14:24 阅读量: 4 订阅数: 7 

参考资源链接:[数字信号处理(第三版)PPT课件](https://wenku.csdn.net/doc/645f4789543f8444888b11a3?spm=1055.2635.3001.10343)
# 1. 数字信号处理基础概念
## 1.1 什么是数字信号处理?
数字信号处理(Digital Signal Processing,简称DSP)是利用数字计算机或专用硬件来处理连续时间信号的学科。这种处理过程涉及信号的采集、存储、显示、传输和增强等。数字信号处理的核心优势在于其高精度、灵活性和可靠性。
## 1.2 数字信号处理与模拟信号处理的区别
数字信号处理与传统的模拟信号处理相比,具有以下优点:
- **更高的准确度**:数字系统可以通过增加处理位数来提高信号的精度。
- **更好的稳定性**:数字系统不受温度、湿度和老化等因素的影响。
- **易于集成**:数字电路更适合集成电路设计,便于集成和微型化。
- **灵活性强**:软件可更新,易于实现复杂的算法和自适应系统。
## 1.3 数字信号处理的应用领域
数字信号处理广泛应用于通信、图像处理、语音识别和医疗等领域。例如,在移动通信中,数字信号处理用于调制解调、信号压缩和错误校正;在语音识别中,用于特征提取和模式匹配;在医疗设备中,用于心电图(ECG)信号的分析和处理。
通过了解数字信号处理的基础概念,我们为进一步深入学习数字信号处理理论框架打下了坚实的基础。在下一章中,我们将详细探索离散时间信号与系统的时域表示以及数字信号处理中的变换技术。
# 2. 数字信号处理理论框架
数字信号处理(Digital Signal Processing, DSP)是研究如何通过数字计算机或专用硬件来处理连续时间信号,并将其实现为数字信号的技术和应用领域。在这一章中,我们将深入探讨离散时间信号与系统的表示方法、数字信号处理中的变换技术,以及数字滤波器设计的基础。
### 2.1 离散时间信号与系统
#### 2.1.1 信号的时域表示
信号的时域表示是指在时间轴上展示信号的振幅变化。在数字信号处理中,常见的时域表示方法有:序列图、差分方程以及状态空间表示法。
- **序列图**:离散时间信号通常表示为序列形式,例如 `x[n]`,其中 `n` 是整数。信号可以是有限的、无限的,也可以是周期性的。
- **差分方程**:系统的行为可以通过差分方程来描述。例如,一个简单的有限脉冲响应(FIR)系统可以用 `y[n] = b0*x[n] + b1*x[n-1] + ... + bk*x[n-k]` 来表示。
- **状态空间表示法**:更复杂的系统往往使用状态空间模型来描述,这种表示法会引入状态变量来表示系统的内部动态。
#### 2.1.2 系统的分类和特性
根据系统的特性和处理方式,可以将系统分为以下几类:
- **线性系统**:满足叠加原理,输入信号的加权和等于系统输出的加权和。
- **时不变系统**:系统的参数不随时间变化。例如,一个系统的响应不受输入信号时间位移的影响。
- **因果系统**:系统在时间`n0`之后的输出仅由`n0`时刻及其后的输入决定,不依赖于未来的输入。
- **稳定系统**:系统的输出能量有界,即对于所有有界输入信号,输出信号也是有界的。
### 2.2 数字信号处理中的变换技术
#### 2.2.1 傅里叶变换及其快速算法
傅里叶变换是分析频率内容的一种重要工具,它将时域信号转换为频域信号。对于离散时间信号,我们使用离散傅里叶变换(Discrete Fourier Transform, DFT)和快速傅里叶变换(Fast Fourier Transform, FFT)。
- **DFT**:对于一个长度为N的信号`x[n]`,其DFT定义为`X[k] = Σn=0 to N-1 x[n]*e^(-j(2π/N)*kn)`,其中`j`是虚数单位。
- **FFT**:为了降低DFT的计算复杂度,Cooley-Tukey提出了FFT算法,它将DFT的复杂度从`O(N^2)`降低到了`O(NlogN)`。
#### 2.2.2 Z变换和离散时间系统的稳定性
Z变换是另一个强大的分析工具,用于处理离散时间信号和系统。它将时域信号映射到复频域,并用Z域表示。与Laplace变换类似,Z变换可用于分析系统的稳定性。
- **Z变换定义**:对于离散时间信号`x[n]`,其Z变换定义为`X(z) = Σn= -∞ to ∞ x[n]*z^(-n)`。
- **稳定性分析**:系统的稳定性可以通过检查Z变换的极点来确定,所有极点必须位于单位圆内。
### 2.3 数字滤波器设计基础
#### 2.3.1 滤波器的类型和设计步骤
数字滤波器按其频率响应可以分为低通、高通、带通和带阻滤波器。设计滤波器通常包括以下几个步骤:
1. **需求分析**:确定滤波器应该满足的性能指标,如截止频率、通带波纹、阻带衰减等。
2. **选择滤波器类型**:根据需求选择合适的滤波器类型,例如FIR或IIR。
3. **设计算法选择**:选择合适的设计算法,如窗函数法、频率采样法或最优化方法。
4. **参数计算**:根据设计算法计算滤波器系数。
5. **系统仿真和测试**:在实际应用前对滤波器进行仿真测试,调整参数以满足设计要求。
#### 2.3.2 有限脉冲响应(FIR)与无限脉冲响应(IIR)滤波器
- **FIR滤波器**:具有有限长度的脉冲响应,其结构简单,容易实现线性相位特性,但需要较长的滤波器阶数以实现陡峭的截止特性。
- **IIR滤波器**:具有无限长度的脉冲响应,一般具有较低的阶数即可达到良好的滤波效果,但存在稳定性问题,不易实现严格的线性相位特性。
以下是实现一个简单FIR滤波器的代码示例:
```matlab
% 设计一个简单的低通FIR滤波器
N = 20; % 滤波器阶数
fc = 0.3; % 截止频率 (归一化频率)
% 使用窗函数法设计FIR滤波器
h = fir1(N, fc, hamming(N+1)');
% 滤波器系数
disp('滤波器系数 h:');
disp(h);
% 滤波器频率响应
[H, w] = freqz(h, 1, 1024);
plot(w/pi, 20*log10(abs(H)));
title('FIR滤波器的频率响应');
xlabel('归一化频率 (\times\pi rad/sample)');
ylabel('幅度 (dB)');
% 测试滤波器性能
x = randn(1, 100); % 生成一个随机信号
y = filter(h, 1, x); % 使用设计的FIR滤波器对信号进行滤波
% 绘制滤波前后的信号
figure;
subplot(2,1,1);
plot(x);
title('原始信号 x[n]');
xlabel('n');
ylabel('幅度');
subplot(2,1,2);
plot(y);
title('滤波后的信号 y[n]');
xlabel('n');
ylabel('幅度');
```
在设计数字滤波器时,需要考虑多种因素,例如相位响应、计算复杂度以及稳定性。上述代码示例展示了如何使用MATLAB的内置函数来设计一个FIR滤波器,并测试其性能。每个代码块后都提供了逻辑分析和参数说明,确保读者能够理解设计过程中的每一步。
在下一章节,我们将继续探索数字信号处理系统实现技术的细节,包括信号的采样与量化、硬件架构以及软件开发和工具链。
# 3. 数字信号处理系统实现技术
在探讨数字信号处理(DSP)系统的实现技术之前,我们有必要理解它的核心组成部分,以及它们如何在实际系统中得以应用。本章将深入探讨信号的采样与量化、硬件架构以及软件开发和工具链等关键领域。
## 3.1 信号的采样与量化
### 3.1.1 采样定理的理论与应用
**采样定理**,也被称为奈奎斯特采样定理,是数字信号处理中的基石,它指出在不超过信号最高频率一半的采样率下采样,可以准确恢复连续信号。这一理论是通信系统中模数转换(ADC)的数学基础,同时也是数字信号处理的前提条件。
在实际应用中,根据信号的特性和系统的需要,选择合适的采样率是至关重要的。例如,音频信号的采样率通常至少为44.1kHz,以确保能够捕获到人耳可听范围内的所有信号。
### 3.1.2 量化误差和信号重建
**量化误差**是采样过程中不可避免的现象,它发生在将连续值的信号映射到有限的离散值的过程中。误差的大小取决于量化级数

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【华为IPD流程管理入门指南】:2020版全面解读

参考资源链接:[华为2020 IPD流程管理详解:客户需求与市场导向](https://wenku.csdn.net/doc/6401abdecce7214c316e9ca0?spm=1055.2635.3001.10343)
# 1. 华为IPD流程管理概述
## 1.1 IPD流程的定义与重要性
集成产品开发(Integrated Pr
【FPGA全解】:掌握FPGA及其在高性能计数器设计中的关键应用

参考资源链接:[FPGA设计:RAM驱动10路8位计数器与按键控制显示](https://wenku.csdn.net/doc/6412b594be7fbd1778d43a98?spm=1055.2635.3001.10343)
# 1. FPGA技术概述与基础
## 1.1 FPGA的起源与
小米鲁班MTB软件新手必备手册:快速解决常见问题
参考资源链接:[小米手机鲁班MTB V6.0.5-13-33软件参数调整指南](https://wenku.csdn.net/doc/jmd7inyjra?spm=1055.2635.3001.10343)
# 1. 小米鲁班MTB软件概览
小米鲁班MTB软件是一款先进的软件开发和测试工具,其设计理念着重于提高开发效率和质量保证。在本章节中,我们将对软件进行基本的概述,为读者提供一个对小米鲁
【FIFO机制深度剖析】:TIA博途先入先出数据管理,让复杂系统运行更流畅
参考资源链接:[TIA博途FIFO指令详解:实现先入先出数据操作](https://wenku.csdn.net/doc/5d7pcr8trv?spm=1055.2635.3001.10343)
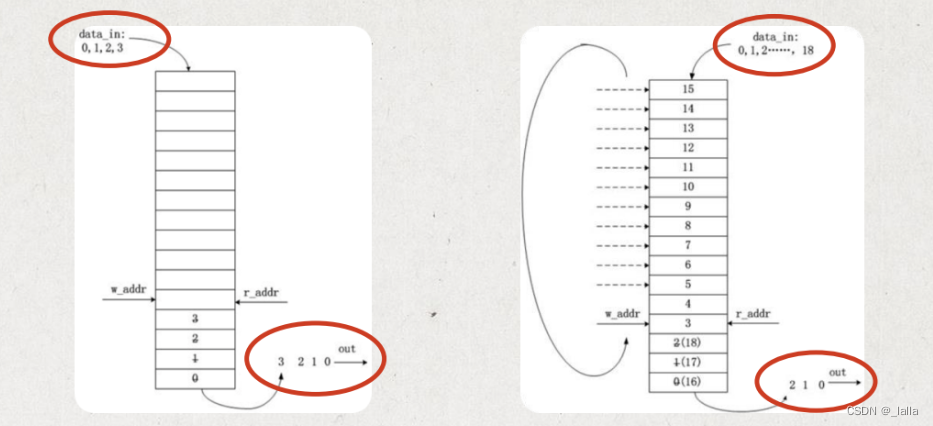
# 1. FIFO机制原理与应用背景
## 1.1 FIFO机制原理概述
FIFO(First In, First Out)是一种数据处理和存储技术,它的核心思想是按照数据进入队列的顺
微信双开技术揭秘:Windows 10专家级多账号操控术

参考资源链接:[微信双开UWP应用技巧:在Windows 10/11上轻松实现](https://wenku.csdn.net/doc/7cfogrihkw?spm=1055.2635.3001.10343)
# 1. 微信双开技术概述
微信双开技术,顾名思义,就是在同一台计算机或移动设备上运行两个独立的微信应用实例。这种技术解决了用户在
【ST7735S芯片手册深度剖析】:一文读懂技术规格与引脚布局

参考资源链接:[ST7735S芯片手册.pdf](https://wenku.csdn.net/doc/645eff3d543f8444888a7fac?spm=1055.2635.3001.10343)
# 1. ST7735S芯片概述与基础技术规格
## 1.1 ST7735S芯片简介
ST7735S是针对小型显示应用设计的彩色TFT LCD驱动器IC,广泛应用于智能手机、MP3播放器、电子辞典、GPS导航系统
【RX N5指令集扩展】:新特性应用与性能提升实战指南

参考资源链接:[Nextchip N5 RX规格书v0.0版本发布](https://wenku.csdn.net/doc/45bayfzh7a?spm=1055.2635.3001.10343)
# 1. RX N5指令集扩展概述
随着计算需求的日益增长,微控制器制造商不得不持续创新以提升性能。RX N5指令集扩展正是这
CST中文教程入门篇:从零开始,掌握基础知识
参考资源链接:[CST中文基础教程:从入门到精通](https://wenku.csdn.net/doc/6rbb1m18du?spm=1055.2635.3001.10343)
# 1. CST软件概述及界面介绍
CST(Computer Simulation Technology)是一款领先的专业电磁仿真软件,广泛应用于微波、射频、天线设计、高速互连和电磁兼容(EMC)等领域的仿真分析。CST具
三菱M70性能测试攻略:验证与优化参数的科学方法
参考资源链接:[三菱M70关键参数详解:系统、轴数与控制设置](https://wenku.csdn.net/doc/249i46rdgf?spm=1055.2635.3001.10343)
# 1. 三菱M70性能测试概览
在现代制造业中,三菱M70数控系统是高性能加工中心的标志,其性能直接影响制造效率和产品精度。本章节将对三菱M70的性能测试进行一个全面的概览,帮助读者快速理解后续章节中的测试方法和优化技巧。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )