揭秘步进电机单片机控制:原理、驱动和应用,助你轻松驾驭电机控制
发布时间: 2024-07-15 10:40:28 阅读量: 78 订阅数: 30 
# 1. 步进电机单片机控制概述
步进电机是一种将电脉冲信号转换成角位移或线位移的电机,具有控制精度高、响应速度快、结构简单等优点。在工业自动化、医疗器械、机器人等领域有着广泛的应用。
单片机是一种集成了CPU、存储器、输入/输出接口等功能的微型计算机,具有体积小、功耗低、成本低等特点。使用单片机控制步进电机,可以实现精密的运动控制和灵活的控制方式。
步进电机单片机控制系统主要由单片机、步进电机驱动器和步进电机组成。单片机负责接收外部指令,生成控制脉冲信号,并通过驱动器控制步进电机的运动。
# 2. 步进电机控制原理
### 2.1 步进电机的结构和工作原理
**结构**
步进电机是一种将电脉冲信号转换成角位移或线位移的电机。其结构主要包括:
* **定子:**由定子铁芯、定子绕组和机壳组成。定子铁芯上分布着齿槽,定子绕组放置在齿槽中。
* **转子:**由转子铁芯和永磁体组成。转子铁芯上也分布着齿槽,永磁体嵌入齿槽中。
**工作原理**
步进电机的基本工作原理是:当定子绕组通电时,会在定子齿槽中产生磁场。该磁场与转子永磁体之间的相互作用产生电磁力,使转子沿定子齿槽的方向移动。
### 2.2 单片机控制步进电机的基本原理
**步进电机控制模式**
单片机控制步进电机主要有两种模式:
* **全步进模式:**每次通电一个定子绕组,转子转动一个步距角。
* **半步进模式:**每次通电两个相邻的定子绕组,转子转动半个步距角。
**控制原理**
单片机控制步进电机需要输出脉冲信号和方向信号。脉冲信号控制转子的步进,方向信号控制转子的旋转方向。
**控制流程**
单片机控制步进电机的流程如下:
1. 初始化单片机和步进电机驱动器。
2. 设置步进电机的步距角和旋转方向。
3. 根据步距角和旋转方向,计算并输出脉冲信号和方向信号。
4. 等待步进电机转动到指定位置。
**代码块:**
```c
// 初始化单片机和步进电机驱动器
void init_system() {
// ...
}
// 设置步进电机的步距角和旋转方向
void set_motor_params(int step_angle, int direction) {
// ...
}
// 计算并输出脉冲信号和方向信号
void output_pulse_and_direction(int steps) {
for (int i = 0; i < steps; i++) {
// 输出脉冲信号
// ...
// 输出方向信号
// ...
}
}
// 等待步进电机转动到指定位置
void wait_for_motor_to_stop() {
// ...
}
```
**逻辑分析:**
* `init_system()` 函数初始化单片机和步进电机驱动器,为控制做准备。
* `set_motor_params()` 函数设置步进电机的步距角和旋转方向。
* `output_pulse_and_direction()` 函数根据步距角和旋转方向,计算并输出脉冲信号和方向信号。
* `wait_for_motor_to_stop()` 函数等待步进电机转动到指定位置,确保控制精度。
# 3. 步进电机驱动技术
### 3.1 步进电机驱动器的类型和特点
步进电机驱动器是用于控制步进电机运动的电子设备。根据驱动原理的不同,步进电机驱动器主要分为以下几种类型:
| 驱动器类型 | 工作原理 | 优点 | 缺点 |
|---|---|---|---|
| **全步驱动器** | 每相绕组通电或断电形成一个完整的步进角,电机转动一个步距角 | 结构简单,成本低 | 扭矩小,振动大 |
| **半步驱动器** | 每相绕组通电或断电形成半个步进角,电机转动半个步距角 | 扭矩比全步驱动器大,振动比全步驱动器小 | 结构比全步驱动器复杂,成本比全步驱动器高 |
| **细分驱动器** | 将步进角进一步细分,形成更小的步距角 | 扭矩比半步驱动器大,振动比半步驱动器小,运行更平稳 | 结构比半步驱动器复杂,成本比半步驱动器高 |
| **微步驱动器** | 将步进角细分到非常小的角度,形成非常小的步距角 | 扭矩比细分驱动器大,振动比细分驱动器小,运行更平稳 | 结构比细分驱动器复杂,成本比细分驱动器高 |
### 3.2 单片机与步进电机驱动器的接口方式
单片机与步进电机驱动器之间可以通过以下几种方式进行接口:
**1. 并行接口**
并行接口使用多个数据线同时传输数据。单片机通过数据线将控制信号(如脉冲、方向、使能等)直接发送给驱动器。
**2. 串行接口**
串行接口使用单条数据线逐位传输数据。单片机通过串行接口发送控制信号给驱动器,驱动器通过接收到的控制信号进行相应动作。
**3. CAN总线接口**
CAN总线接口是一种高速、抗干扰的通信总线。单片机通过CAN总线发送控制信号给驱动器,驱动器通过接收到的控制信号进行相应动作。
**4. 以太网接口**
以太网接口是一种基于TCP/IP协议的通信方式。单片机通过以太网发送控制信号给驱动器,驱动器通过接收到的控制信号进行相应动作。
**代码块:**
```c
// 并行接口驱动步进电机
void step_motor_parallel(uint8_t pulse, uint8_t direction, uint8_t enable)
{
// 设置脉冲引脚
HAL_GPIO_WritePin(PULSE_GPIO_Port, PULSE_Pin, pulse);
// 设置方向引脚
HAL_GPIO_WritePin(DIRECTION_GPIO_Port, DIRECTION_Pin, direction);
// 设置使能引脚
HAL_GPIO_WritePin(ENABLE_GPIO_Port, ENABLE_Pin, enable);
}
// 串行接口驱动步进电机
void step_motor_serial(uint8_t data)
{
// 发送数据
HAL_UART_Transmit(&huart1, &data, 1, 100);
}
```
**逻辑分析:**
* `step_motor_parallel()`函数通过并行接口驱动步进电机,参数`pulse`、`direction`、`enable`分别控制脉冲、方向、使能信号。
* `step_motor_serial()`函数通过串行接口驱动步进电机,参数`data`为发送给驱动器的控制数据。
# 4.1 步进电机控制系统的搭建和调试
### 系统搭建
步进电机控制系统搭建主要包括以下步骤:
1. **硬件准备:**
- 步进电机
- 单片机(如 Arduino、STM32)
- 步进电机驱动器
- 电源
- 连接线
2. **硬件连接:**
- 根据步进电机驱动器的说明书,将步进电机、单片机和驱动器连接起来。
- 连接电源,确保系统供电正常。
3. **软件编写:**
- 使用单片机的开发环境编写控制程序,包括步进电机驱动器的初始化、步进电机控制算法和用户交互界面等。
### 系统调试
系统搭建完成后,需要进行调试以确保其正常运行:
1. **检查硬件连接:**
- 逐一检查硬件连接是否正确,确保无松动或短路。
2. **测试步进电机:**
- 使用示波器或万用表测量步进电机驱动器的输出信号,验证其是否正常。
- 手动旋转步进电机,观察其是否能正常转动。
3. **调试控制程序:**
- 将控制程序下载到单片机中。
- 使用串口或其他调试工具,验证程序是否能正常运行。
- 调整控制参数,如步进电机速度、加速度等,以获得所需的运动效果。
### 常见问题及解决方法
在系统调试过程中,可能会遇到以下常见问题:
| 问题 | 解决方法 |
|---|---|
| 步进电机不转动 | 检查硬件连接、驱动器设置和控制程序 |
| 步进电机转动不平稳 | 调整驱动器电流、速度和加速度参数 |
| 步进电机发热严重 | 检查驱动器散热措施、电机负载和环境温度 |
| 系统响应慢 | 优化控制算法、减少系统延迟 |
### 优化建议
为了提高步进电机控制系统的性能,可以进行以下优化:
- **使用高性能驱动器:**选择具有高电流、低噪音和高响应速度的驱动器。
- **优化控制算法:**采用先进的控制算法,如 PID 控制或自适应控制,以提高控制精度和响应速度。
- **减少系统延迟:**优化硬件连接和软件处理,以减少系统延迟,提高响应时间。
- **改善散热措施:**为驱动器和电机提供良好的散热条件,以防止过热。
# 5. 步进电机控制应用案例
### 5.1 数控机床中的步进电机控制
在数控机床上,步进电机主要用于控制刀具的移动和定位。步进电机的高精度和可控性使其非常适合这种应用。
**应用原理:**
数控机床中的步进电机控制系统通常由以下组件组成:
- **单片机:**负责接收数控程序指令,并根据指令控制步进电机。
- **步进电机驱动器:**负责放大单片机输出的信号,并为步进电机提供所需的电流和电压。
- **步进电机:**负责根据单片机的指令,将电信号转换为机械运动。
**控制算法:**
数控机床中的步进电机控制算法通常采用脉冲和方向控制方式。单片机根据数控程序指令,输出一组脉冲信号和方向信号。步进电机驱动器根据脉冲信号的频率和方向信号,控制步进电机以一定的速度和方向运动。
**优化方法:**
为了提高数控机床的加工精度和效率,步进电机控制系统需要进行优化。常见的优化方法包括:
- **细分驱动:**将步进电机的步距细分,提高控制精度。
- **电流控制:**根据负载情况动态调整步进电机的电流,提高运动平稳性。
- **闭环控制:**使用编码器或其他传感器反馈步进电机的实际位置,实现闭环控制,提高定位精度。
### 5.2 机器人中的步进电机控制
在机器人中,步进电机主要用于控制机器人的关节运动和定位。步进电机的高扭矩和可控性使其非常适合这种应用。
**应用原理:**
机器人中的步进电机控制系统通常由以下组件组成:
- **单片机:**负责接收机器人控制指令,并根据指令控制步进电机。
- **步进电机驱动器:**负责放大单片机输出的信号,并为步进电机提供所需的电流和电压。
- **步进电机:**负责根据单片机的指令,将电信号转换为机械运动。
**控制算法:**
机器人中的步进电机控制算法通常采用位置控制方式。单片机根据机器人控制指令,输出一组位置信号。步进电机驱动器根据位置信号,控制步进电机以一定的速度和精度运动到指定位置。
**优化方法:**
为了提高机器人的运动精度和效率,步进电机控制系统需要进行优化。常见的优化方法包括:
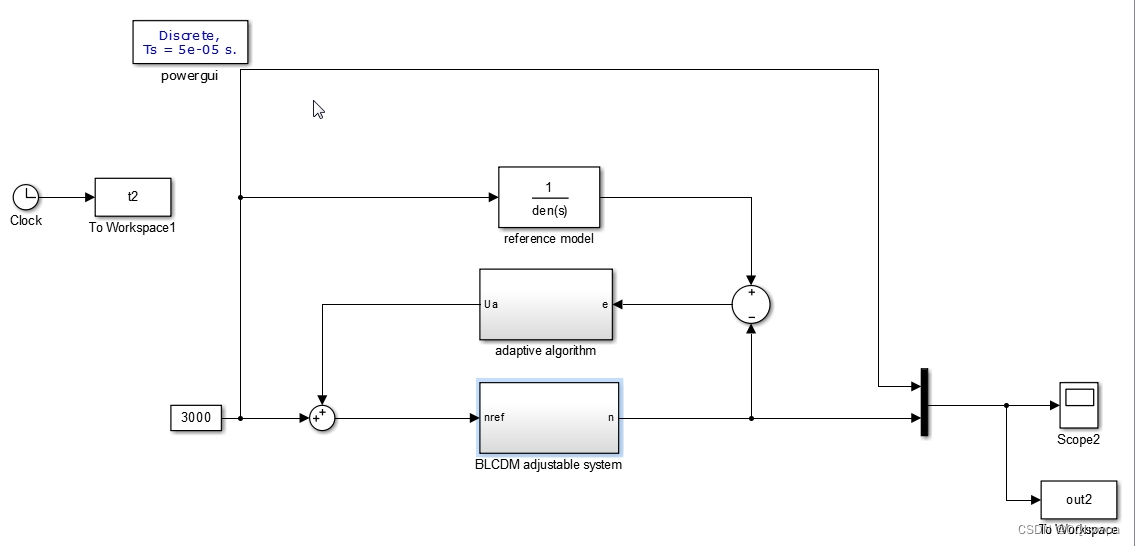
- **PID控制:**使用PID控制器对步进电机的速度和位置进行闭环控制,提高控制精度和稳定性。
- **自适应控制:**根据机器人的负载和环境变化,动态调整控制参数,提高适应性。
- **运动规划:**优化机器人的运动轨迹,减少运动时间和能量消耗。
# 6.1 步进电机控制系统的优化方法
### 1. 控制算法优化
* **基于PID算法的优化:**调整PID参数(比例、积分、微分),提高控制系统的稳定性和响应速度。
* **基于模糊控制的优化:**利用模糊规则和推理机制,实现更精确的控制,提高系统鲁棒性。
* **基于神经网络的优化:**利用神经网络自学习和自适应能力,提高控制系统的非线性处理能力。
### 2. 驱动器优化
* **选择合适的驱动器:**根据步进电机特性和控制要求,选择合适的驱动器类型和功率。
* **驱动器参数优化:**调整驱动器参数(如电流、细分等),优化电机运行性能。
* **驱动器抗干扰优化:**采取措施提高驱动器的抗干扰能力,如使用滤波器、屏蔽措施等。
### 3. 电机参数优化
* **电机选型:**根据控制要求和负载特性,选择合适的电机型号和规格。
* **电机参数调整:**调整电机参数(如惯量、阻尼等),优化电机运行特性。
* **电机散热优化:**采取措施提高电机散热能力,如加装散热片、风扇等。
### 4. 系统结构优化
* **优化系统拓扑结构:**根据控制要求和硬件条件,选择合适的系统拓扑结构,如单片机直接控制、PLC控制等。
* **优化通信方式:**选择合适的通信方式(如串口、CAN总线等),保证控制系统的实时性和稳定性。
* **优化系统冗余设计:**采取措施提高系统冗余性,如增加备用电机、驱动器等,提高系统可靠性。
### 5. 其他优化方法
* **使用编码器反馈:**通过编码器反馈电机位置信息,提高控制精度和稳定性。
* **采用抗振措施:**采取措施抑制电机振动,如使用减振器、优化电机安装方式等。
* **优化控制软件:**优化控制软件算法,提高控制系统的效率和稳定性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《步进电机单片机控制宝典》专栏全面涵盖步进电机单片机控制技术,从基础原理到实战应用,助你深入掌握电机控制。专栏内容包括:
* **原理、驱动和应用:**揭秘步进电机的工作原理,驱动方式和应用领域。
* **优化秘籍:**提升电机精度和效率的优化技巧。
* **故障排查与解决:**快速诊断和解决电机控制故障。
* **案例剖析:**从理论到实战,掌握电机控制精髓。
* **算法解析:**深入理解控制原理,提升电机性能。
* **硬件设计手册:**电路原理和选型指南,助力电机控制硬件开发。
* **故障诊断与维护:**确保系统稳定运行的故障诊断和维护策略。
此外,专栏还深入探讨了步进电机单片机控制在工业自动化、机器人技术、医疗设备、航空航天、智能家居、汽车电子、消费电子、物联网、可再生能源等领域的应用,帮助读者了解电机控制技术的广泛应用和发展趋势。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
计算机组成原理:指令集架构的演变与影响

# 摘要
本文综合论述了计算机组成原理及其与指令集架构的紧密关联。首先,介绍了指令集架构的基本概念、设计原则与分类,详细探讨了CISC、RISC架构特点及其在微架构和流水线技术方面的应用。接着,回顾了指令集架构的演变历程,比较了X86到X64的演进、RISC架构(如ARM、MIPS和PowerPC)的发展,以及SIMD指令集(例如AVX和NEON)的应用实例。文章进一步分析了指令集
CMOS传输门的功耗问题:低能耗设计的5个实用技巧
# 摘要
CMOS传输门作为集成电路的关键组件,其功耗问题直接影响着芯片的性能与能效。本文首先对CMOS传输门的工作原理进行了阐述,并对功耗进行了概述。通过理论基础和功耗模型分析,深入探讨了CMOS传输门的基本结构、工作模式以及功耗的静态和动态区别,并建立了相应的分析模型。本文还探讨了降低CMOS传输门功耗的设计技巧,包括电路设计优化和先进工艺技术的采用。进一步,通过设计仿真与实际
TSPL2打印性能优化术:减少周期与提高吞吐量的秘密

# 摘要
本文全面探讨了TSPL2打印技术及其性能优化实践。首先,介绍了TSPL2打印技术的基本概念和打印性能的基础理论,包括性能评估指标以及打印设备的工作原理。接着,深入分析了提升打印周期和吞吐量的技术方法,并通过案例分析展示了优化策略的实施与效果评估。文章进一步讨论了高级TSPL2打印技术的应用,如自动
KEPServerEX秘籍全集:掌握服务器配置与高级设置(最新版2018特性深度解析)
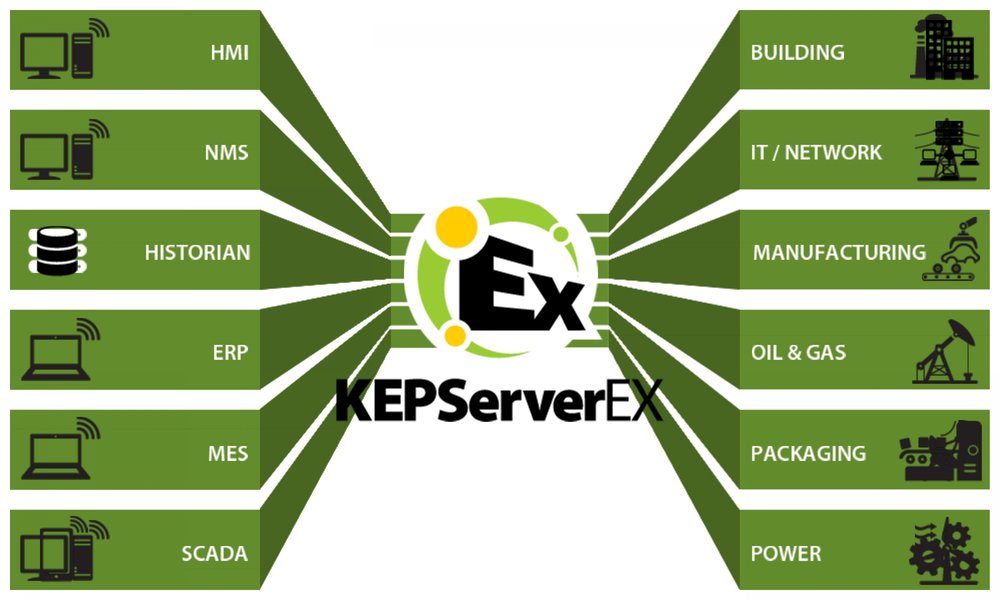
# 摘要
KEPServerEX作为一种广泛使用的工业通信服务器软件,为不同工业设备和应用程序之间的数据交换提供了强大的支持。本文从基础概述入手,详细介绍了KEPServerEX的安装流程和核心特性,包括实时数据采集与同步,以及对通讯协议和设备驱动的支持。接着,文章深入探讨了服务器的基本配置,安全性和性能优化的高级设
Java天气预报:设计模式在数据处理中的巧妙应用
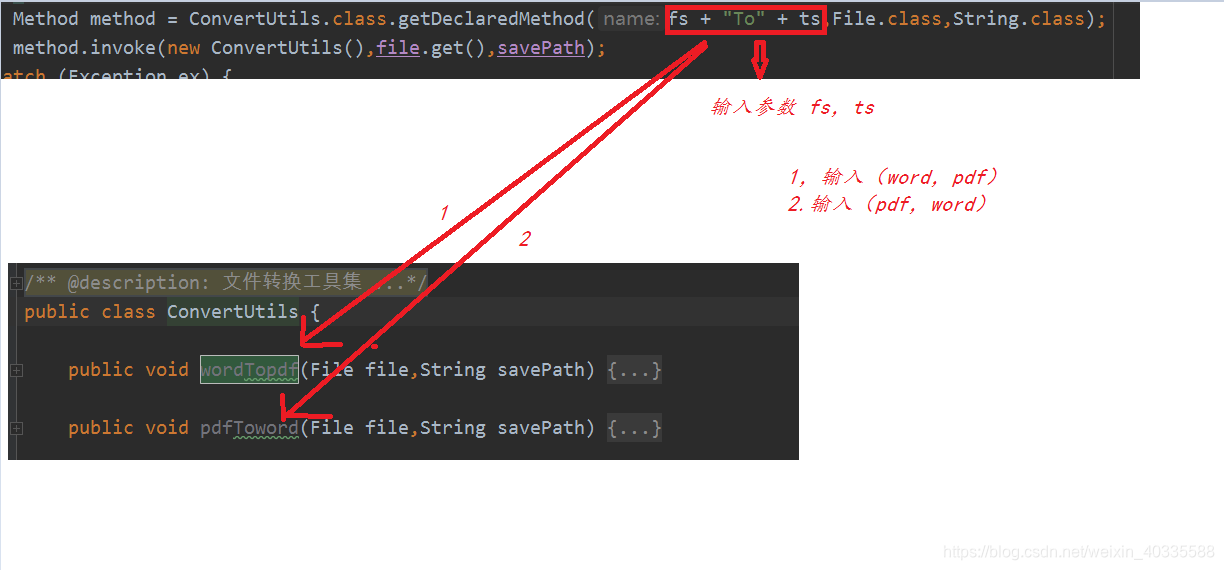
# 摘要
设计模式在数据处理领域中的应用已成为软件开发中的一个重要趋势。本文首先探讨了设计模式与数据处理的融合之道,接着详细分析了创建型、结构型和行为型设
【SAP ABAP终极指南】:掌握XD01增强的7个关键步骤,提升业务效率
# 摘要
本文探讨了SAP ABAP在业务效率提升中的作用,特别是通过理解XD01事务和增强的概念来实现业务流程优化。文章详细阐述了XD01事务的业务逻辑、增强的步骤以及它们对业务效率的影响。同时,针对SAP ABAP增强实践技巧提供了具体的指导,并提出了进阶学习路径,包括掌握高级特性和面向未来的SAP技术趋势。本文旨在为SAP ABAP
【逻辑门电路深入剖析】:在Simulink中的高级逻辑电路应用

# 摘要
本文系统性地探讨了逻辑门电路的设计、优化以及在数字系统和控制系统中的应用。首先,我们介绍了逻辑门电路的基础知识,并在Simulink环境中展示了其设计过程。随后,文章深入到高级逻辑电路的构建,包括触发器、锁存器、计数器、分频器、编码器、解码器和多路选择器的应用与设计。针对逻辑电路的优化与故障诊断,我们提出了一系列策略和方法。最后,文章通过实际案例分析,探讨了逻辑
JFFS2文件系统故障排查:源代码视角的故障诊断
# 摘要
本文全面探讨了JFFS2文件系统的架构、操作、故障类型、诊断工具、故障恢复技术以及日常维护与未来发展趋势。通过源代码分析,深入理解了JFFS2的基本架构、数据结构、初始化、挂载机制、写入和读取操作。接着,针对文件系统损坏的原因进行了分析,并通过常见故障案例,探讨了系统崩溃后的恢复过程以及数据丢失问题的排查方法。文中还介绍了利用源代码进行故障定位、内存泄漏检测、性能瓶颈识别与优化的技术和方法
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )