揭秘MATLAB矩阵求逆的秘密:从理论到实战,助你轻松掌握
发布时间: 2024-05-24 21:08:18 阅读量: 28 订阅数: 25 
# 1. MATLAB矩阵求逆的基础理论
**1.1 矩阵求逆的定义**
矩阵求逆,又称矩阵的逆运算,是指对于一个非奇异方阵,求出一个与其相乘后得到单位矩阵的矩阵。单位矩阵是一个对角线元素均为1,其余元素均为0的方阵。
**1.2 矩阵求逆的意义**
矩阵求逆在数学和工程领域具有广泛的应用,包括:
* 求解线性方程组
* 矩阵变换和投影
* 矩阵优化和控制
* 数据分析和机器学习
# 2. MATLAB矩阵求逆的算法和方法
### 2.1 矩阵求逆的定义和意义
矩阵求逆,又称矩阵的逆运算,是线性代数中一项重要的操作。对于一个可逆方阵**A**,其逆矩阵**A<sup>-1</sup>**满足以下关系:
```
A * A<sup>-1</sup> = A<sup>-1</sup> * A = I
```
其中,**I**为单位矩阵。
矩阵求逆在数学和工程应用中有着广泛的应用,例如:
* 求解线性方程组
* 矩阵变换和投影
* 矩阵优化和控制
### 2.2 矩阵求逆的两种主要算法
#### 2.2.1 高斯消元法
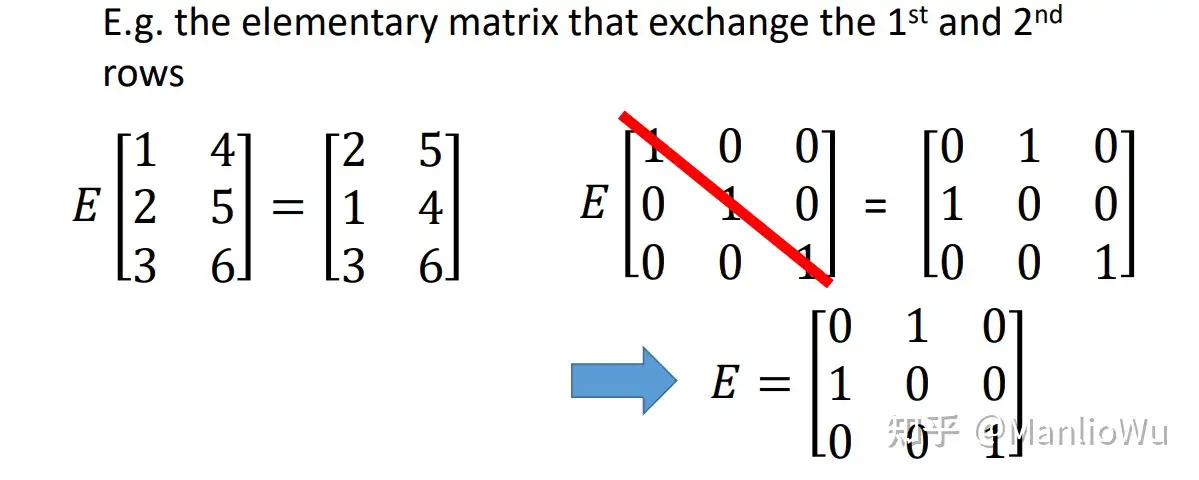
高斯消元法是一种经典的矩阵求逆算法。该算法通过一系列行变换(行交换、行加减)将矩阵**A**化为上三角矩阵,再通过回代计算得到逆矩阵**A<sup>-1</sup>**。
**代码块:**
```matlab
function A_inv = gauss_jordan(A)
% 高斯消元法求逆
[m, n] = size(A);
if m ~= n
error('矩阵不是方阵,无法求逆');
end
% 扩展单位矩阵
augmented_A = [A, eye(m)];
% 行变换化为上三角矩阵
for i = 1:m
% 将第i行化为单位行
augmented_A(i, :) = augmented_A(i, :) / augmented_A(i, i);
% 消去第i行以下的行中第i列的元素
for j = i+1:m
augmented_A(j, :) = augmented_A(j, :) - augmented_A(j, i) * augmented_A(i, :);
end
end
% 回代计算逆矩阵
A_inv = augmented_A(:, n+1:end);
end
```
**逻辑分析:**
* `gauss_jordan`函数接收一个方阵**A**作为输入,并返回其逆矩阵**A<sup>-1</sup>**。
* 首先检查**A**是否为方阵,如果不是则报错。
* 扩展**A**为增广矩阵**augmented_A**,其中右侧为单位矩阵。
* 使用行变换将**augmented_A**化为上三角矩阵。
* 通过回代计算,提取增广矩阵右侧的单位矩阵部分,即为逆矩阵**A<sup>-1</sup>**。
#### 2.2.2 分块求逆法
分块求逆法是一种高效的矩阵求逆算法,特别适用于大型稀疏矩阵。该算法将矩阵**A**划分为若干个子块,并利用分块矩阵的性质进行求逆。
**代码块:**
```matlab
function A_inv = block_inverse(A)
% 分块求逆法
[m, n] = size(A);
if m ~= n
error('矩阵不是方阵,无法求逆');
end
% 分块矩阵划分
n_blocks = sqrt(m);
blocks = mat2cell(A, ones(1, n_blocks) * m / n_blocks, ones(1, n_blocks) * n / n_blocks);
% 求解每个子块的逆矩阵
inv_blocks = cellfun(@(block) inv(block), blocks, 'UniformOutput', false);
% 重组子块逆矩阵
A_inv = cell2mat(inv_blocks);
end
```
**逻辑分析:**
* `block_inverse`函数接收一个方阵**A**作为输入,并返回其逆矩阵**A<sup>-1</sup>**。
* 首先检查**A**是否为方阵,如果不是则报错。
* 将**A**划分为**n_blocks**个子块。
* 求解每个子块的逆矩阵。
* 重组子块逆矩阵,得到**A<sup>-1</sup>**。
### 2.3 矩阵求逆的条件和特殊情况
#### 2.3.1 可逆矩阵的条件
一个矩阵**A**可逆当且仅当其行列式不为零,即:
```
det(A) ≠ 0
```
#### 2.3.2 奇异矩阵的处理
如果一个矩阵**A**的行列式为零,则称为奇异矩阵。奇异矩阵不可逆,因此无法求逆。
**mermaid流程图:**
```mermaid
graph LR
subgraph 矩阵可逆性判断
A[矩阵A] --> B[行列式不为0]
B --> C[可逆]
A --> D[行列式为0]
D --> E[奇异]
end
```
**表格:**
| 矩阵类型 | 行列式 | 可逆性 |
|---|---|---|
| 可逆矩阵 | 不为零 | 可逆 |
| 奇异矩阵 | 为零 | 不可逆 |
# 3.1 矩阵方程组求解
#### 3.1.1 线性方程组求解
在科学计算和工程应用中,求解线性方程组是常见且重要的任务。MATLAB 中提供了多种求解线性方程组的方法,其中使用矩阵求逆是最直接的方法。
**代码块:**
```
% 给定线性方程组系数矩阵 A 和右端向量 b
A = [2, 1; 4, 3];
b = [1; 2];
% 使用矩阵求逆求解方程组
x = A \ b;
% 输出解向量
disp(x);
```
**代码逻辑分析:**
* `A \ b` 运算符使用矩阵左除法,等价于求解方程组 `A * x = b`。
* `x` 变量存储求得的解向量。
* `disp(x)` 输出解向量。
**参数说明:**
* `A`:系数矩阵,是一个 m x n 矩阵。
* `b`:右端向量,是一个 m x 1 向量。
* `x`:解向量,是一个 n x 1 向量。
#### 3.1.2 非线性方程组求解
对于非线性方程组,MATLAB 中提供了 `fsolve` 函数来求解。`fsolve` 函数使用牛顿法或修正牛顿法迭代求解非线性方程组。
**代码块:**
```
% 定义非线性方程组
fun = @(x) [x(1)^2 - 2*x(2); x(2)^3 - x(1)];
% 初始猜测解向量
x0 = [0; 0];
% 使用 fsolve 求解方程组
options = optimset('Display', 'iter'); % 显示迭代信息
[x, fval, exitflag, output] = fsolve(fun, x0, options);
% 输出解向量
disp(x);
```
**代码逻辑分析:**
* `fun` 函数定义了非线性方程组,其中 `x` 是待求解的变量向量。
* `x0` 是初始猜测解向量。
* `fsolve` 函数使用牛顿法或修正牛顿法迭代求解非线性方程组。
* `options` 设置了求解器的显示选项,`'Display', 'iter'` 表示显示迭代信息。
* `x` 变量存储求得的解向量。
* `fval` 变量存储求解得到的函数值。
* `exitflag` 变量表示求解器的退出标志。
* `output` 变量存储求解器的输出信息。
* `disp(x)` 输出解向量。
**参数说明:**
* `fun`:非线性方程组函数句柄。
* `x0`:初始猜测解向量。
* `options`:求解器选项结构体。
* `x`:解向量。
* `fval`:求解得到的函数值。
* `exitflag`:求解器的退出标志。
* `output`:求解器的输出信息。
# 4. MATLAB矩阵求逆的进阶技巧
### 4.1 矩阵求逆的数值稳定性
#### 4.1.1 数值稳定性的概念和影响因素
数值稳定性是指算法在输入数据存在微小扰动的情况下,输出结果的相对变化很小。对于矩阵求逆,数值稳定性至关重要,因为它涉及到除法运算,而除法运算对输入数据的微小扰动非常敏感。
影响矩阵求逆数值稳定性的因素包括:
- **矩阵的条件数:**条件数衡量了矩阵接近奇异的程度。条件数越大,矩阵越不稳定。
- **算法的选择:**不同的求逆算法具有不同的数值稳定性。例如,高斯消元法在某些情况下可能不稳定。
- **计算机精度:**计算机的浮点运算精度会影响求逆结果的准确性。
#### 4.1.2 提高矩阵求逆数值稳定性的方法
提高矩阵求逆数值稳定性的方法包括:
- **使用数值稳定的算法:**例如,LU分解或奇异值分解(SVD)。
- **缩放矩阵:**对矩阵进行缩放,使元素的大小相近,可以提高稳定性。
- **使用复数域:**对于复数矩阵,使用复数域的算法可以提高稳定性。
- **增加精度:**使用更高的浮点精度(例如,双精度)可以减少舍入误差的影响。
### 4.2 矩阵求逆的并行计算
#### 4.2.1 并行计算的原理和优势
并行计算是指将计算任务分配给多个处理器或计算机同时执行。对于矩阵求逆,并行计算可以显著提高效率,特别是对于大型矩阵。
并行计算的优势包括:
- **速度提升:**多个处理器同时工作,可以缩短求逆时间。
- **可扩展性:**并行算法可以轻松扩展到更多处理器,以进一步提高性能。
- **资源利用:**并行计算可以利用计算机的空闲资源,提高整体效率。
#### 4.2.2 MATLAB中矩阵求逆的并行化实现
MATLAB提供了并行计算工具箱,可以轻松实现矩阵求逆的并行化。以下代码展示了如何使用并行计算工具箱求解矩阵A的逆:
```matlab
% 创建一个大矩阵A
A = randn(1000, 1000);
% 创建并行池
parpool;
% 并行求解矩阵A的逆
A_inv = inv(A);
% 关闭并行池
delete(gcp);
```
### 4.3 矩阵求逆的特殊应用
#### 4.3.1 矩阵求逆在图像处理中的应用
矩阵求逆在图像处理中有着广泛的应用,例如:
- **图像去模糊:**使用逆滤波器可以去除图像中的模糊。
- **图像增强:**通过矩阵求逆可以增强图像的对比度和亮度。
- **图像配准:**通过求解仿射变换矩阵的逆,可以将图像配准到另一个图像。
#### 4.3.2 矩阵求逆在机器学习中的应用
矩阵求逆在机器学习中也扮演着重要的角色,例如:
- **线性回归:**求解线性回归模型的参数需要使用矩阵求逆。
- **支持向量机:**支持向量机的训练过程涉及到求解一个二次规划问题,其中需要使用矩阵求逆。
- **神经网络:**神经网络的训练过程中,需要使用矩阵求逆来更新权重矩阵。
# 5. MATLAB矩阵求逆的常见问题与解决方案
### 5.1 矩阵求逆失败的原因和解决方法
#### 5.1.1 奇异矩阵的处理
奇异矩阵是指行列式为0的矩阵,其不可逆。在MATLAB中,可以使用`isfinite`函数来检查矩阵是否奇异。如果矩阵奇异,则`isfinite`函数返回`false`。
```
% 定义一个奇异矩阵
A = [1 2; 3 6];
% 检查矩阵是否奇异
is_singular = ~isfinite(det(A));
% 打印奇异矩阵的处理结果
if is_singular
disp('矩阵奇异,无法求逆。')
else
disp('矩阵可逆,可以求逆。')
end
```
对于奇异矩阵,无法直接求逆。一种解决方法是使用广义逆。广义逆是一种伪逆,可以为奇异矩阵提供近似解。在MATLAB中,可以使用`pinv`函数来计算广义逆。
```
% 计算奇异矩阵的广义逆
A_inv = pinv(A);
% 打印广义逆的结果
disp('广义逆:')
disp(A_inv)
```
#### 5.1.2 数值不稳定的问题
数值不稳定性是指矩阵求逆过程中引入的误差会放大,导致求解结果不准确。在MATLAB中,可以使用`cond`函数来计算矩阵的条件数。条件数越大,矩阵越不稳定。
```
% 定义一个数值不稳定的矩阵
A = [1e10 1; 1 1e-10];
% 计算矩阵的条件数
cond_num = cond(A);
% 打印条件数的结果
disp('条件数:')
disp(cond_num)
```
对于数值不稳定的矩阵,求逆结果可能会出现较大的误差。一种解决方法是使用更稳定的算法,例如分块求逆法。分块求逆法将矩阵分解为多个较小的块,然后逐块求逆。
```
% 使用分块求逆法求解数值不稳定的矩阵
A_inv = inv(A, 'block');
% 打印分块求逆的结果
disp('分块求逆:')
disp(A_inv)
```
### 5.2 矩阵求逆结果的精度和误差分析
#### 5.2.1 精度的影响因素
矩阵求逆结果的精度受多种因素影响,包括:
* **矩阵的条件数:**条件数越小,求逆结果越准确。
* **浮点数精度:**MATLAB使用双精度浮点数进行计算,浮点数精度限制了求逆结果的精度。
* **算法的稳定性:**不同的求逆算法具有不同的稳定性,稳定性高的算法可以产生更准确的结果。
#### 5.2.2 误差分析的方法
可以采用以下方法对矩阵求逆结果的误差进行分析:
* **相对误差:**相对误差是求逆结果与真实逆矩阵之间的相对误差。
* **绝对误差:**绝对误差是求逆结果与真实逆矩阵之间的绝对误差。
* **条件数分析:**条件数可以衡量矩阵求逆的敏感性,条件数越大,误差越大。
```
% 定义一个矩阵
A = [2 1; 3 4];
% 计算矩阵的逆矩阵
A_inv = inv(A);
% 计算真实逆矩阵
A_true_inv = [0.4 -0.2; -0.3 0.6];
% 计算相对误差
rel_error = norm(A_inv - A_true_inv, 'fro') / norm(A_true_inv, 'fro');
% 计算绝对误差
abs_error = norm(A_inv - A_true_inv, 'fro');
% 打印误差分析的结果
disp('相对误差:')
disp(rel_error)
disp('绝对误差:')
disp(abs_error)
```
# 6. MATLAB矩阵求逆的拓展应用
### 6.1 矩阵广义逆的求解和应用
**6.1.1 矩阵广义逆的定义和性质**
矩阵广义逆,又称伪逆,是对于非方阵或奇异矩阵求逆的一种推广。它可以将一个非方阵或奇异矩阵转换为一个具有唯一解的方程组。矩阵广义逆的定义如下:
对于一个m×n矩阵A,其广义逆A+满足以下条件:
* AA+A = A
* A+AA+ = A+
* (AA+)+ = A+
* (A+A)+ = A
**6.1.2 矩阵广义逆的求解方法**
MATLAB中提供了多种求解矩阵广义逆的方法,包括:
* `pinv`函数:使用奇异值分解(SVD)求解矩阵广义逆。
* `inv`函数:对于可逆矩阵,`inv`函数可以求解其广义逆。
* `mldivide`运算符:使用高斯消元法求解矩阵广义逆。
### 6.2 矩阵条件数的计算和应用
**6.2.1 矩阵条件数的定义和意义**
矩阵条件数衡量的是矩阵对扰动的敏感性。它定义为矩阵范数与矩阵逆范数之比:
```
cond(A) = ||A|| * ||A-1||
```
其中,||A||表示矩阵A的范数,||A-1||表示矩阵A-1的范数。
矩阵条件数越大,表示矩阵对扰动越敏感。条件数较大的矩阵在求解时容易出现数值不稳定问题。
**6.2.2 矩阵条件数的计算方法**
MATLAB中提供了多种计算矩阵条件数的方法,包括:
* `cond`函数:直接计算矩阵条件数。
* `rcond`函数:计算矩阵的相对条件数,即矩阵条件数与矩阵范数之比。
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 MATLAB 矩阵求逆的全面指南!本专栏深入探讨了 MATLAB 中矩阵求逆的各个方面,从理论基础到实际应用。
我们将揭开矩阵求逆的秘密,从行列式、伴随矩阵和克莱姆法则等数学概念开始。您将掌握一步步求解矩阵逆的方法,避免常见的陷阱,并优化计算性能。
本专栏还涵盖了矩阵求逆在数据分析、机器学习、图像处理、科学计算和工程等领域的广泛应用。我们将探索替代方法,如伪逆和奇异值分解,以及确保数值稳定性和并行化计算的重要性。
此外,您将获得宝贵的工具箱和库资源,以及综合案例研究、教学材料和行业应用。本专栏旨在帮助您从初学者到专家,轻松掌握 MATLAB 矩阵求逆的精髓。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python字典常见问题与解决方案:快速解决字典难题
# 1. Python字典简介
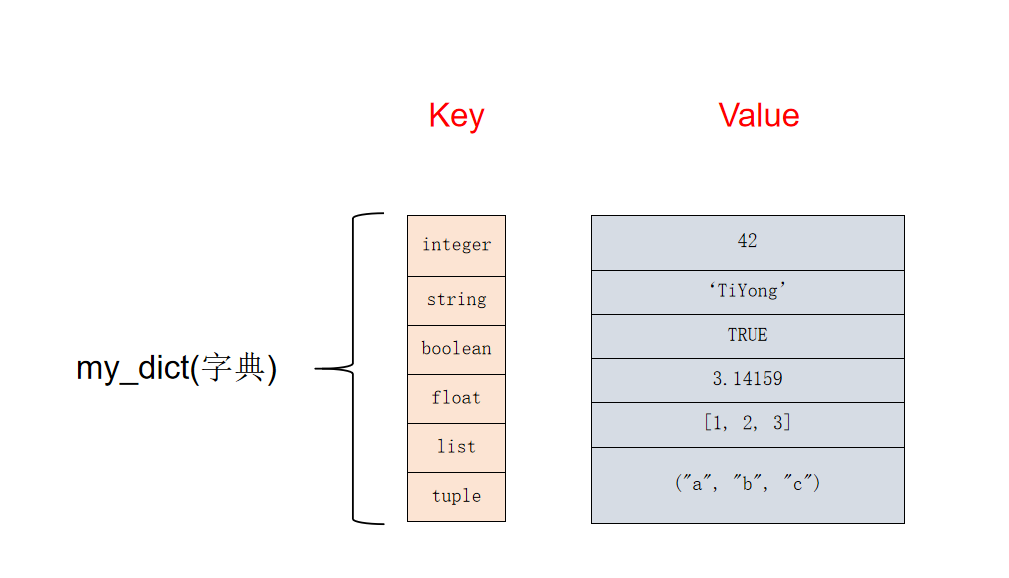
Python字典是一种无序的、可变的键值对集合。它使用键来唯一标识每个值,并且键和值都可以是任何数据类型。字典在Python中广泛用于存储和组织数据,因为它们提供了快速且高效的查找和插入操作。
在Python中,字典使用大括号 `{}` 来表示。键和值由冒号 `:` 分隔,键值对由逗号 `,` 分隔。例如,以下代码创建了一个包含键值对的字典:
```py
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
Python列表操作的扩展之道:使用append()函数创建自定义列表类

# 1. Python列表操作基础
Python列表是一种可变有序的数据结构,用于存储同类型元素的集合。列表操作是Py
OODB数据建模:设计灵活且可扩展的数据库,应对数据变化,游刃有余

# 1. OODB数据建模概述
对象-面向数据库(OODB)数据建模是一种数据建模方法,它将现实世界的实体和关系映射到数据库中。与关系数据建模不同,OODB数据建模将数据表示为对象,这些对象具有属性、方法和引用。这种方法更接近现实世界的表示,从而简化了复杂数据结构的建模。
OODB数据建模提供了几个关键优势,包括:
* **对象标识和引用完整性
Python Excel数据分析:统计建模与预测,揭示数据的未来趋势
# 1. Python Excel数据分析概述**
**1.1 Python Excel数据分析的优势**
Python是一种强大的编程语言,具有丰富的库和工具,使其成为Excel数据分析的理想选择。通过使用Python,数据分析人员可以自动化任务、处理大量数据并创建交互式可视化。
**1.2 Python Excel数据分析库**
Python map函数在代码部署中的利器:自动化流程,提升运维效率

# 1. Python map 函数简介**
map 函数是一个内置的高阶函数,用于将一个函数应用于可迭代对象的每个元素,并返回一个包含转换后元素的新可迭代对象。其语法为:
```python
map(function, iterable)
```
其中,`function` 是要应用的函数,`iterable` 是要遍历的可迭代对象。map 函数通
【实战演练】综合自动化测试项目:单元测试、功能测试、集成测试、性能测试的综合应用

# 2.1 单元测试框架的选择和使用
单元测试框架是用于编写、执行和报告单元测试的软件库。在选择单元测试框架时,需要考虑以下因素:
* **语言支持:**框架必须支持你正在使用的编程语言。
* **易用性:**框架应该易于学习和使用,以便团队成员可以轻松编写和维护测试用例。
* **功能性:**框架应该提供广泛的功能,包括断言、模拟和存根。
* **报告:**框架应该生成清
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
【进阶】自然语言处理基础:TF-IDF计算
# 2.1 TF(词频)计算
### 2.1.1 词频定义
词频(TF)衡量一个词在给定文档中出现的次数。它反映了该词在文档中出现的频率,是TF-IDF算法中最重要的因素之一。
### 2.1.2 词频计算方法
词频的计算公式为:
```
TF(t, d) = (词t在文档d中出现的次数) / (文档d中所有词的总数)
```
其中:
* `t` 是文档中出现的词
* `d`
Python脚本调用与区块链:探索脚本调用在区块链技术中的潜力,让区块链技术更强大

# 1. Python脚本与区块链简介**
**1.1 Python脚本简介**
Python是一种高级编程语言,以其简洁、易读和广泛的库而闻名。它广泛用于各种领域,包括数据科学、机器学习和Web开发。
**1.2 区块链简介**
区块链是一种分布式账本技术,用于记录交易并防止篡改。它由一系列称为区块的数据块组成,每个区块都包含一组交易和指向前一个区块的哈希值。区块链的去中心化和不可变性使其
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )