视差图转深度图助力自动驾驶:为无人驾驶铺平道路,赋能智能交通
发布时间: 2024-08-12 17:32:03 阅读量: 24 订阅数: 21 

视差图转深度图1
# 1. 视差图与深度图**
视差图和深度图是计算机视觉中用于表示三维场景深度信息的两种重要图像格式。视差图记录了场景中每个像素在不同视点下的位移,而深度图则直接表示每个像素到摄像机的距离。
视差图和深度图之间存在密切的关系。通过三角测量原理,可以将视差图转换为深度图。具体来说,对于同一场景中的两个视点,如果已知摄像机的位置和焦距,则可以根据视差计算出每个像素的深度。
# 2.1 立体视觉原理
立体视觉是人类和动物感知深度的一种能力,它是通过两只眼睛获取同一场景的不同视点图像,然后大脑将这两个图像融合处理,从而产生深度感知。
立体视觉的原理是基于三角测量原理。两只眼睛之间的距离称为基线,当观察同一个物体时,由于两只眼睛的位置不同,物体在视网膜上的成像位置也会不同,这种位置差异称为视差。视差的大小与物体到眼睛的距离成反比,因此通过测量视差,可以推算出物体到眼睛的距离,从而感知深度。
### 视差的计算
视差的计算可以通过以下公式得到:
```python
disparity = (x_left - x_right) / baseline
```
其中:
* `disparity` 为视差
* `x_left` 为物体在左眼视网膜上的横坐标
* `x_right` 为物体在右眼视网膜上的横坐标
* `baseline` 为两只眼睛之间的距离
### 视差图
视差图是由视差值组成的图像,它反映了场景中每个像素点的视差大小。视差图可以直观地展示场景的深度信息,视差值越大,表示物体越近。
### 深度图
深度图是由深度值组成的图像,它反映了场景中每个像素点的深度信息。深度值表示物体到相机的距离,深度值越大,表示物体越远。
### 视差图与深度图的关系
视差图和深度图是密切相关的,可以通过以下公式将视差图转换为深度图:
```python
depth = baseline / disparity
```
其中:
* `depth` 为深度值
* `baseline` 为两只眼睛之间的距离
* `disparity` 为视差值
# 3. 视差图转深度图的实践方法
### 3.1 基于匹配的深度估计
基于匹配的深度估计是视差图转深度图最经典的方法,其核心思想是通过寻找视差图中对应的像素点来计算深度值。
#### 3.1.1 窗口匹配
窗口匹配是一种局部匹配方法,它将视差图中的每个像素点与一个固定大小的窗口进行匹配。窗口内像素点的相似度通常使用归一化互相关(NCC)或互信息(MI)等度量标准来计算。
```python
import numpy as np
def window_matching(left_image, right_image, window_size=5):
"""
窗口匹配算法
Args:
left_image: 左视图图像
right_image: 右视图图像
window_size: 窗口大小
Returns:
视差图
"""
height, width = left_image.shape[:2]
disparity_map = np.zeros((height, width), dtype=np.float32)
for i in range(height):
for j in range(width):
# 定义窗口
window = left_image[i:i+window_size, j:j+window_size]
# 遍历右视图图像中的窗口
best_match = None
best_score = -np.inf
for k in range(width):
right_window = right_image[i:i+window_size, k:k+window_size]
# 计算窗口之间的相似度
score = np.corrcoef(window.flatten(), right_window.flatten())[0, 1]
if score > best_score:
best_match = k
best_score = score
# 计算视差值
disparity_map[i, j] = j - best_match
return disparity_map
```
**代码逻辑解读:**
* 遍历左视图图像中的每个像素点。
* 为每个像素点定义一个窗口。
* 遍历右视图图像中的窗口,计算窗口之间的相似度。
* 选择相似度最高的窗口,计算视差值。
#### 3.1.2 全局优化
窗口匹配虽然简单高效,但容易产生错误匹配。全局优化方法通过考虑视差图的全局一致性来消除错误匹配。
```python
import cv2
def global_optimization(disparity_map, window_size=5):
"""
全局优化算法
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**专栏简介**
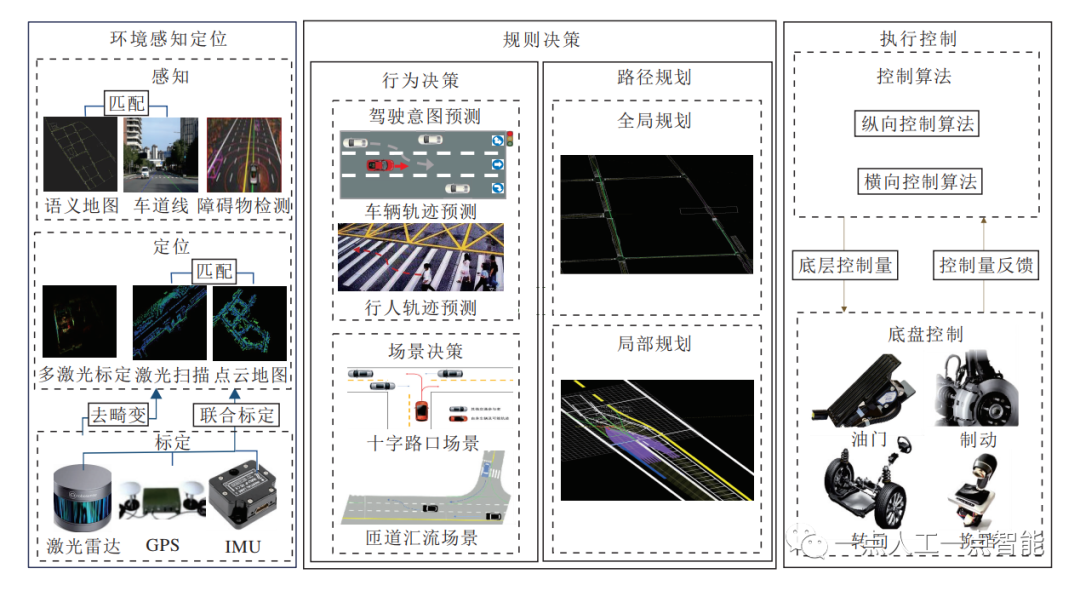
本专栏深入探讨了视差图转深度图的原理、算法、挑战和应对策略,并提供了优化策略和开源工具。它涵盖了计算机视觉、机器人、增强现实、自动驾驶、精准医疗、遥感等领域的应用。专栏还分析了误差、并行化处理、GPU加速和深度学习应用,以提高精度、效率和智能化。通过揭示视差图转深度图的奥秘,本专栏旨在赋能3D视觉技术,推动其在各个领域的创新和发展。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深度图的数学原理大揭秘:几何到算法的全面解读
# 摘要
深度图作为一种包含了场景中物体距离信息的重要视觉数据,对于三维重建、增强现实、
【HP增霸卡故障快速修复手册】:快速定位并解决常见问题

# 摘要
本文系统地介绍了HP增霸卡的概述、故障诊断基础以及各类故障的识别和处理方法。首先,概述了增霸卡的功能和基本故障诊断流程,随后详细阐述了硬件故障和软件故障的识别、诊断和修复方法,包括硬件组件功能及故障表现、软件冲突和系统性能问题。接着,文章探讨了网络故障的排查、诊断和修复策略,并提供了具体的操作指导。此外,
【Ansys Workbench案例分析】:流体动力学仿真流程详解及优化建议

# 摘要
本文介绍了Ansys Workbench在流体动力学仿真中的应用,首先概述了流体动力学的基本理论和仿真前的准备工作,接着详细讨论了流体域模型的建立、边界条件与求解器设置以及结果的分析与后处理。此外,提出了仿真流程的优化建议,包括仿真精度与计算资源的平衡策略和常见问题的诊断与解决方法。最后,探讨了Ansys Workbench的高
CAA高级策略:构建CATIA V5R19定制解决方案的实践指南

# 摘要
本文全面探讨了CAA(Component Application Architecture)的基础知识、架构概览、定制开发环境搭建、解决方案设计与实现以及调试与优化的高级策略。首先介绍了C
【德律TRI AOI7700速成课】:新手必备的5个实用技巧

# 摘要
本文详细介绍了德律TRI AOI7700自动光学检测设备的基本概念、功能、操作界面、项目设置、图像处理与分析技巧以及故障诊断与解决方案。首先概述了该设备的核心功能和应用领域,然后深入探讨了其操作界面的设计和基本操作技巧,包括文件处理和快捷键使用。接着,文章阐述了项目设置和管理的细节,重点介绍了参数设置、项目优化和维护。
【ICD编码错误案例全分析】:揭秘常见错误,确保编码的准确性无误
# 摘要
ICD编码系统作为国际通用的疾病分类编码标准,在医疗记录和数据统计中扮演着至关重要的角色。本文首先概述了ICD编码系统的基本概念,随后分析了编码过程中常见的错误类型,包括编码选择错误、规则理解偏差和操作失误。这些编码错误不仅影响医疗服务质量,还会干扰医疗数据统计的准确性,进而影响医疗费用的正确核算。为应对这些问题,本文提出了针对性的预防和纠正策略,强调了提高编码人员专业素质、利用技术手段优化编码过程以及建立健全监管与审核机制的重要性。最后,本文探讨了ICD编码未来的发展趋势,包括国际标准的融合、新技术的应用前景以及相关的伦理与法律问题。
# 关键字
ICD编码系统;编码错误;医疗服
本征模求解全解析:HFSS边界条件设置详解及最佳实践

# 摘要
本文全面介绍了高频率结构仿真(HFSS)及其边界条件的基础理论与应用实践。首先,对HFSS的界面和边界条件设置进行了基础讲解,然后深入探讨了边界条件的理论基础、数学模型及其对仿真结果的影响。文章还详细介绍了在不同类型的应用场景中如何设置和优化边界条件,并通过案例分析展示其在提高高速数字信号完整性、研究天线阵列辐射特性和微波器件设计中的最佳应用实践。最后,展望了边界条件计算精度的提升方法
【Magisk青龙面板深度定制】:高级使用与扩展功能揭秘

# 摘要
Magisk青龙面板作为一款强大的Android系统增强工具,提供了广泛的定制和优化选项,适用于需要高度自定义操作系统的用户。本文详细介绍了Magisk青龙面板的安装、配置以及高级使用技巧,同时探讨了其在系统增强功能应用、创新功能探索和扩展功能深度剖析方面的实际应用。文章还
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )