探索虚拟与现实的无界融合:硬件在环仿真,开拓仿真新天地
发布时间: 2024-07-02 03:00:27 阅读量: 46 订阅数: 33 
# 1. 硬件在环仿真的概念和原理**
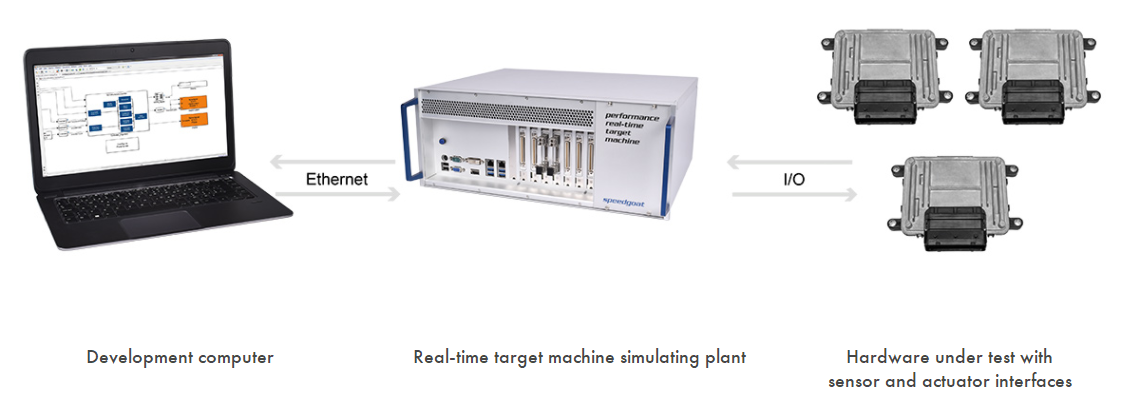
硬件在环仿真(HIL)是一种用于测试和验证嵌入式系统的技术,其中物理硬件与计算机仿真模型相结合。HIL 仿真通过将物理硬件与仿真模型连接起来,创建了一个闭环系统,使物理硬件可以与仿真模型交互,而仿真模型可以控制物理硬件的行为。
HIL 仿真通常用于测试和验证嵌入式系统在实际环境中的性能。通过使用 HIL 仿真,工程师可以模拟真实世界的条件,并测试嵌入式系统对各种输入和事件的响应。这有助于识别和解决潜在问题,并在实际部署之前验证系统性能。
# 2. 硬件在环仿真的技术架构
硬件在环仿真(HIL)是一种先进的仿真技术,它将物理硬件与计算机仿真模型相结合,以创建逼真的测试环境。其技术架构由以下关键组件组成:
### 2.1 仿真平台与硬件接口
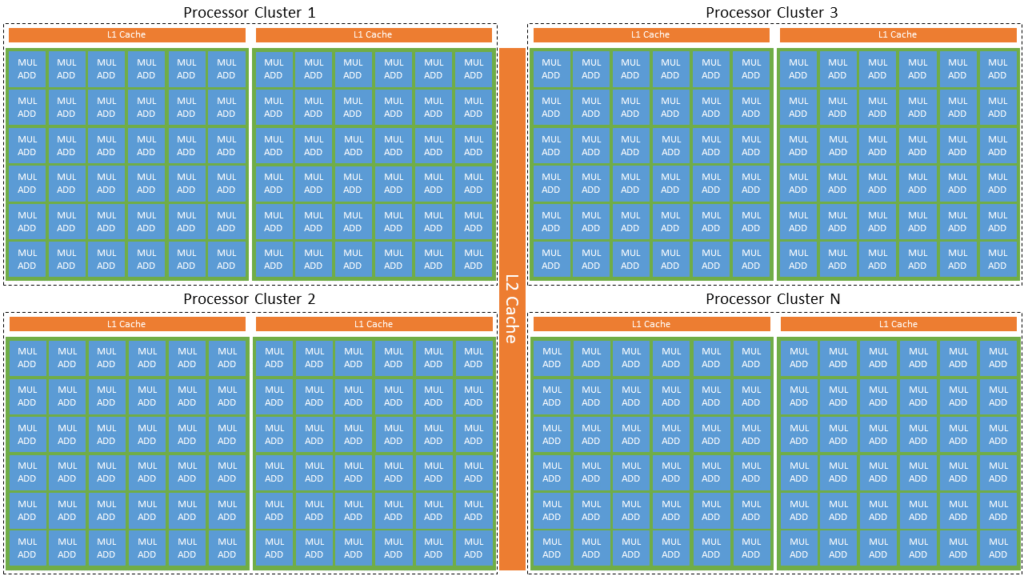
仿真平台是HIL系统的核心,它负责运行仿真模型并与物理硬件进行交互。仿真平台通常基于高性能计算机或现场可编程门阵列(FPGA),能够实时执行复杂的仿真模型。
硬件接口是连接仿真平台与物理硬件的桥梁。它将仿真平台的信号转换为物理硬件可识别的格式,并反之亦然。硬件接口可以是模拟的、数字的或混合的,具体取决于物理硬件的类型。
### 2.2 数据采集与处理
HIL系统需要采集和处理来自物理硬件的大量数据。这些数据包括传感器读数、控制信号和故障信息。数据采集模块负责从物理硬件收集数据,而数据处理模块则负责过滤、处理和存储这些数据。
数据处理模块通常采用各种技术,如信号调理、数据融合和故障检测。通过处理数据,HIL系统可以提取有价值的信息,用于仿真模型的验证和改进。
### 2.3 实时控制与反馈
实时控制与反馈是HIL系统至关重要的方面。实时控制模块负责根据仿真模型的输出控制物理硬件。反馈模块则将物理硬件的状态反馈给仿真模型,以更新仿真。
实时控制和反馈回路确保了HIL系统能够实时响应物理硬件的动态变化。这对于测试和验证需要快速响应的系统,如汽车电子和航空航天系统,至关重要。
**代码块 1:仿真平台与硬件接口**
```python
import numpy as np
import scipy.io as sio
import matplotlib.pyplot as plt
# 仿真模型
model = sio.loadmat('model.mat')
A = model['A']
B = model['B']
C = model['C']
D = model['D']
# 硬件接口
interface = {'input_channels': 2, 'output_channels': 1}
# 仿真平台
platform = {'cpu': 'Intel Core i7', 'memory': '16GB', 'gpu': 'NVIDIA GeForce GTX 1080'}
```
**逻辑分析:**
代码块 1 展示了仿真平台与硬件接口的配置。仿真模型使用 NumPy 和 SciPy 库加载。硬件接口定义了输入和输出通道的数量。仿真平台指定了计算机的硬件规格。
**代码块 2:数据采集与处理**
```python
# 数据采集
data_采集 = {'sensors': ['temperature', 'pressure'], 'frequency': 100}
# 数据处理
data_处理 = {'filters': ['moving average', 'Kalman filter'], 'fusion': 'weighted average'}
```
**逻辑分析:**
代码块 2 定义了数据采集和处理模块。数据采集模块指定要采集的传感器和采集频率。数据处理模块指定了用于处理数据的滤波器和融合技术。
**代码块 3:实时控制与反馈**
```python
# 实时控制
control = {'contr
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探究了硬件在环 (HIL) 仿真的各个方面,揭示了它在系统集成、测试和验证中的关键作用。从原理和实践到核心技术和应用场景,文章全面阐述了 HIL 仿真如何通过虚拟与现实的无缝交互,打造可靠且高性能的系统。专栏还提供了实用的指南,涵盖从建模到数据分析的各个方面,强调了实时性、可视化、自动化和协同仿真的重要性。通过云计算和边缘计算的赋能,HIL 仿真不断拓展其边界,推动行业创新,提升系统性能和可靠性。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【硬件实现】:如何构建性能卓越的PRBS生成器

# 摘要
本文全面探讨了伪随机二进制序列(PRBS)生成器的设计、实现与性能优化。首先,介绍了PRBS生成器的基本概念和理论基础,重点讲解了其工作原理以及相关的关键参数,如序列长度、生成多项式和统计特性。接着,分析了PRBS生成器的硬件实现基础,包括数字逻辑设计、FPGA与ASIC实现方法及其各自的优缺点。第四章详细讨论了基于FPGA和ASIC的PRBS设计与实现过程,包括设计方法和验
NUMECA并行计算核心解码:掌握多节点协同工作原理
# 摘要
NUMECA并行计算是处理复杂计算问题的高效技术,本文首先概述了其基础概念及并行计算的理论基础,随后深入探讨了多节点协同工作原理,包括节点间通信模式以及负载平衡策略。通过详细说明并行计算环境搭建和核心解码的实践步骤,本文进一步分析了性能评估与优化的重要性。文章还介绍了高级并行计算技巧,并通过案例研究展示了NUMECA并行计算的应用。最后,本文展望了并行计
提升逆变器性能监控:华为SUN2000 MODBUS数据优化策略

# 摘要
逆变器作为可再生能源系统中的关键设备,其性能监控对于确保系统稳定运行至关重要。本文首先强调了逆变器性能监控的重要性,并对MODBUS协议进行了基础介绍。随后,详细解析了华为SUN2000逆变器的MODBUS数据结构,阐述了数据包基础、逆变器的注册地址以及数据的解析与处理方法。文章进一步探讨了性能数据的采集与分析优化策略,包括采集频率设定、异常处理和高级分析技术。
小红书企业号认证必看:15个常见问题的解决方案
# 摘要
本文系统地介绍了小红书企业号的认证流程、准备工作、认证过程中的常见问题及其解决方案,以及认证后的运营和维护策略。通过对认证前准备工作的详细探讨,包括企业资质确认和认证材料
FANUC面板按键深度解析:揭秘操作效率提升的关键操作
# 摘要
FANUC面板按键作为工业控制中常见的输入设备,其功能的概述与设计原理对于提高操作效率、确保系统可靠性及用户体验至关重要。本文系统地介绍了FANUC面板按键的设计原理,包括按键布局的人机工程学应用、触觉反馈机制以及电气与机械结构设计。同时,本文也探讨了按键操作技巧、自定义功能设置以及错误处理和维护策略。在应用层面,文章分析了面板按键在教育培训、自动化集成和特殊行业中的优化策略。最后,本文展望了按键未来发展趋势,如人工智能、机器学习、可穿戴技术及远程操作的整合,以及通过案例研究和实战演练来提升实际操作效率和性能调优。
# 关键字
FANUC面板按键;人机工程学;触觉反馈;电气机械结构
【UML类图与图书馆管理系统】:掌握面向对象设计的核心技巧

# 摘要
本文旨在探讨面向对象设计中UML类图的应用,并通过图书馆管理系统的需求分析、设计、实现与测试,深入理解UML类图的构建方法和实践。文章首先介绍了UML类图基础,包括类图元素、关系类型以及符号规范,并详细讨论了高级特性如接口、依赖、泛化以及关联等。随后,文章通过图书馆管理系统的案例,展示了如何将UML类图应用于需求分析、系统设计和代码实现。在此过程中,本文强调了面向对象设计原则,评价了UML类图在设计阶段
【虚拟化环境中的SPC-5】:迎接虚拟存储的新挑战与机遇
# 摘要
本文旨在全面介绍虚拟化环境与SPC-5标准,深入探讨虚拟化存储的基础理论、存储协议与技术、实践应用案例,以及SPC-5标准在虚拟化环境中的应用挑战。文章首先概述了虚拟化技术的分类、作用和优势,并分析了不同架构模式及SPC-5标准的发展背景。随后
硬件设计验证中的OBDD:故障模拟与测试的7大突破
# 摘要
OBDD(有序二元决策图)技术在故障模拟、测试生成策略、故障覆盖率分析、硬件设计验证以及未来发展方面展现出了强大的优势和潜力。本文首先概述了OBDD技术的基础知识,然后深入探讨了其在数字逻辑故障模型分析和故障检测中的应用。进一步地,本文详细介绍了基于OBDD的测试方法,并分析了提高故障覆盖率的策略。在硬件设计验证章节中,本文通过案例分析,展示了OBDD的构建过程、优化技巧及在工业级验证中的应用。最后,本文展望了OBDD技术与机器学习等先进技术的融合,以及OBDD工具和资源的未来发展趋势,强调了OBDD在AI硬件验证中的应用前景。
# 关键字
OBDD技术;故障模拟;自动测试图案生成
海康威视VisionMaster SDK故障排除:8大常见问题及解决方案速查

# 摘要
本文全面介绍了海康威视VisionMaster SDK的使用和故障排查。首先概述了SDK的特点和系统需求,接着详细探讨了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )