传感器与执行器的桥梁:硬件在环仿真,连接虚拟与现实
发布时间: 2024-07-02 03:14:36 阅读量: 56 订阅数: 33 

用于水下机器人仿真的GazeboROS软件包
# 1. 硬件在环仿真概述
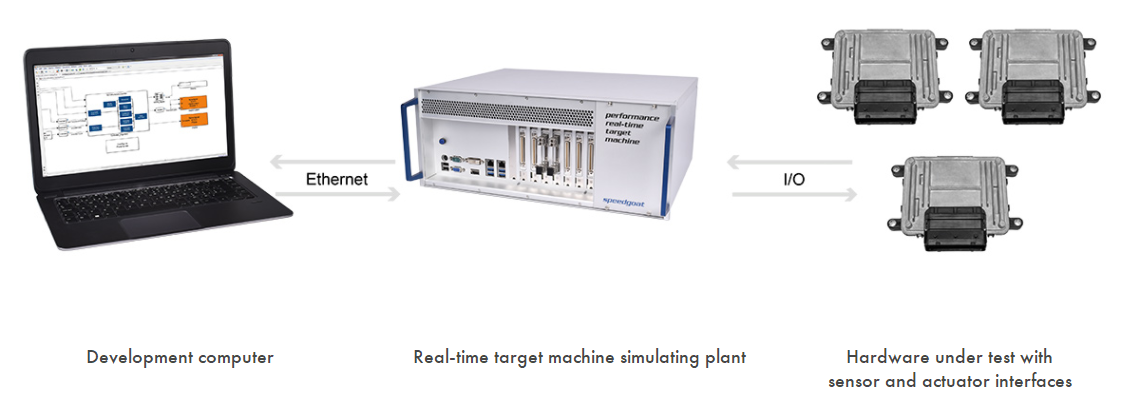
硬件在环仿真(HIL)是一种先进的测试技术,它将物理硬件与虚拟仿真环境相结合,以评估和验证嵌入式系统在真实世界条件下的性能。HIL 仿真通过创建虚拟环境,模拟实际操作条件,从而允许工程师在不依赖物理原型的情况下测试和验证系统。通过这种方式,HIL 仿真可以显著缩短开发时间,降低成本,并提高嵌入式系统设计的质量和可靠性。
# 2. 硬件在环仿真技术原理
### 2.1 虚拟仿真环境搭建
**虚拟仿真环境搭建**是硬件在环仿真技术的基础。它需要构建一个与真实硬件系统高度相似的虚拟环境,以提供硬件交互和数据处理的平台。
**虚拟仿真环境的搭建步骤:**
1. **选择仿真软件:**选择功能强大、仿真精度高的仿真软件,如MATLAB/Simulink、National Instruments LabVIEW、Ansys Fluent等。
2. **建立仿真模型:**根据真实硬件系统的结构和功能,建立相应的仿真模型。仿真模型应尽可能准确地反映硬件系统的行为和特性。
3. **配置仿真参数:**设置仿真时间步长、仿真精度、仿真终止条件等参数,以确保仿真结果的准确性和效率。
### 2.2 硬件与虚拟环境交互
**硬件与虚拟环境交互**是硬件在环仿真技术的核心。它需要建立硬件与虚拟仿真环境之间的通信机制,实现数据交换和控制。
**硬件与虚拟环境交互的方式:**
1. **I/O接口:**通过I/O接口(如USB、CAN、Ethernet等)连接硬件和仿真环境,实现数据传输和控制命令的发送。
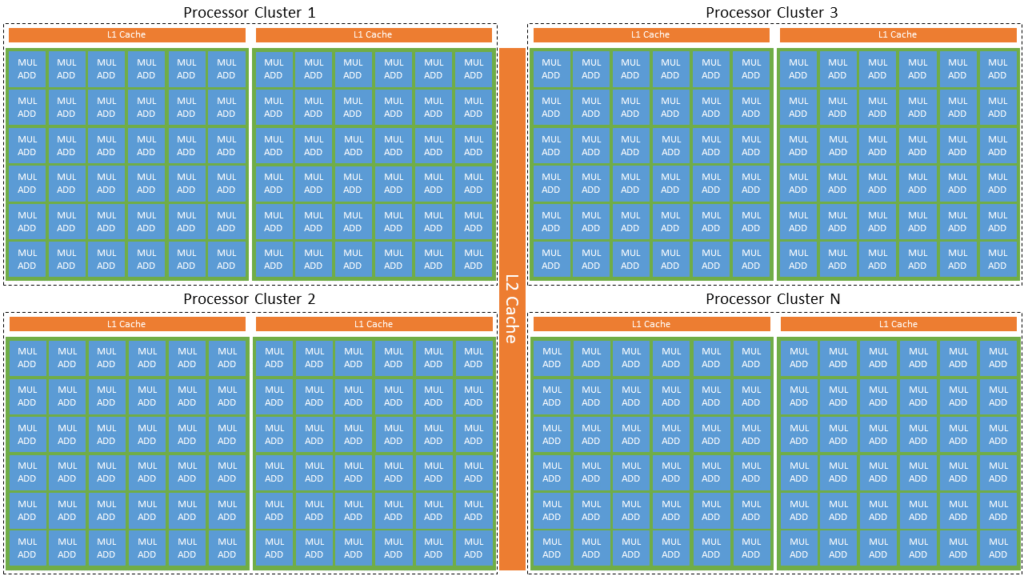
2. **FPGA/DSP:**使用FPGA或DSP(现场可编程门阵列/数字信号处理器)作为硬件接口,实现高速数据处理和实时控制。
3. **HIL接口卡:**使用专门的HIL接口卡,提供硬件与仿真环境之间的高速、低延迟通信。
### 2.3 实时数据采集与处理
**实时数据采集与处理**是硬件在环仿真技术的关键环节。它需要从硬件系统中采集实时数据,并进行处理和分析,以评估仿真结果。
**实时数据采集与处理的步骤:**
1. **数据采集:**通过传感器、数据采集卡等设备,从硬件系统中采集实时数据。
2. **数据预处理:**对采集到的数据进行预处理,包括滤波、归一化、特征提取等。
3. **数据分析:**使用统计学、机器学习等方法,对预处理后的数据进行分析,提取有价值的信息。
4. **结果展示:**将分析结果以图形、表格等形式展示,方便用户查看和理解。
**代码块:**
```python
import numpy as np
import matplotlib.pyplot as plt
# 数据采集
data = np.loadtxt('data.csv', delimiter=',')
# 数据预处理
data = data[::100] # 降采样
data = (data - np.mean(data)) / np.std(data) # 归一化
# 数据分析
plt.plot(data)
plt.show()
```
**代码逻辑分析:**
* `np.loadtxt()`函数从CSV文件中加载数据。
* `data[::100]`对数据进行降采样,以提高处理效率。
* `(data - np.mean(data)) / np.std(data)`对数据进行归一化,以消除数据尺度差异的影响。
* `plt.plot(data)`绘制数据的折线图。
* `plt.show()`显示折线图。
**参数说明:**
* `data.csv`:数据文件路径。
* `delimiter`:数据分隔符。
* `data[::100]`:降采样因子。
* `np.mean(data)`:数据均值。
* `np.std(data)`:数据标准差。
# 3. 硬件在环仿真应用场景
### 3

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探究了硬件在环 (HIL) 仿真的各个方面,揭示了它在系统集成、测试和验证中的关键作用。从原理和实践到核心技术和应用场景,文章全面阐述了 HIL 仿真如何通过虚拟与现实的无缝交互,打造可靠且高性能的系统。专栏还提供了实用的指南,涵盖从建模到数据分析的各个方面,强调了实时性、可视化、自动化和协同仿真的重要性。通过云计算和边缘计算的赋能,HIL 仿真不断拓展其边界,推动行业创新,提升系统性能和可靠性。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【硬件实现】:如何构建性能卓越的PRBS生成器

# 摘要
本文全面探讨了伪随机二进制序列(PRBS)生成器的设计、实现与性能优化。首先,介绍了PRBS生成器的基本概念和理论基础,重点讲解了其工作原理以及相关的关键参数,如序列长度、生成多项式和统计特性。接着,分析了PRBS生成器的硬件实现基础,包括数字逻辑设计、FPGA与ASIC实现方法及其各自的优缺点。第四章详细讨论了基于FPGA和ASIC的PRBS设计与实现过程,包括设计方法和验
NUMECA并行计算核心解码:掌握多节点协同工作原理
# 摘要
NUMECA并行计算是处理复杂计算问题的高效技术,本文首先概述了其基础概念及并行计算的理论基础,随后深入探讨了多节点协同工作原理,包括节点间通信模式以及负载平衡策略。通过详细说明并行计算环境搭建和核心解码的实践步骤,本文进一步分析了性能评估与优化的重要性。文章还介绍了高级并行计算技巧,并通过案例研究展示了NUMECA并行计算的应用。最后,本文展望了并行计
提升逆变器性能监控:华为SUN2000 MODBUS数据优化策略

# 摘要
逆变器作为可再生能源系统中的关键设备,其性能监控对于确保系统稳定运行至关重要。本文首先强调了逆变器性能监控的重要性,并对MODBUS协议进行了基础介绍。随后,详细解析了华为SUN2000逆变器的MODBUS数据结构,阐述了数据包基础、逆变器的注册地址以及数据的解析与处理方法。文章进一步探讨了性能数据的采集与分析优化策略,包括采集频率设定、异常处理和高级分析技术。
小红书企业号认证必看:15个常见问题的解决方案
# 摘要
本文系统地介绍了小红书企业号的认证流程、准备工作、认证过程中的常见问题及其解决方案,以及认证后的运营和维护策略。通过对认证前准备工作的详细探讨,包括企业资质确认和认证材料
FANUC面板按键深度解析:揭秘操作效率提升的关键操作
# 摘要
FANUC面板按键作为工业控制中常见的输入设备,其功能的概述与设计原理对于提高操作效率、确保系统可靠性及用户体验至关重要。本文系统地介绍了FANUC面板按键的设计原理,包括按键布局的人机工程学应用、触觉反馈机制以及电气与机械结构设计。同时,本文也探讨了按键操作技巧、自定义功能设置以及错误处理和维护策略。在应用层面,文章分析了面板按键在教育培训、自动化集成和特殊行业中的优化策略。最后,本文展望了按键未来发展趋势,如人工智能、机器学习、可穿戴技术及远程操作的整合,以及通过案例研究和实战演练来提升实际操作效率和性能调优。
# 关键字
FANUC面板按键;人机工程学;触觉反馈;电气机械结构
【UML类图与图书馆管理系统】:掌握面向对象设计的核心技巧

# 摘要
本文旨在探讨面向对象设计中UML类图的应用,并通过图书馆管理系统的需求分析、设计、实现与测试,深入理解UML类图的构建方法和实践。文章首先介绍了UML类图基础,包括类图元素、关系类型以及符号规范,并详细讨论了高级特性如接口、依赖、泛化以及关联等。随后,文章通过图书馆管理系统的案例,展示了如何将UML类图应用于需求分析、系统设计和代码实现。在此过程中,本文强调了面向对象设计原则,评价了UML类图在设计阶段
【虚拟化环境中的SPC-5】:迎接虚拟存储的新挑战与机遇
# 摘要
本文旨在全面介绍虚拟化环境与SPC-5标准,深入探讨虚拟化存储的基础理论、存储协议与技术、实践应用案例,以及SPC-5标准在虚拟化环境中的应用挑战。文章首先概述了虚拟化技术的分类、作用和优势,并分析了不同架构模式及SPC-5标准的发展背景。随后
硬件设计验证中的OBDD:故障模拟与测试的7大突破
# 摘要
OBDD(有序二元决策图)技术在故障模拟、测试生成策略、故障覆盖率分析、硬件设计验证以及未来发展方面展现出了强大的优势和潜力。本文首先概述了OBDD技术的基础知识,然后深入探讨了其在数字逻辑故障模型分析和故障检测中的应用。进一步地,本文详细介绍了基于OBDD的测试方法,并分析了提高故障覆盖率的策略。在硬件设计验证章节中,本文通过案例分析,展示了OBDD的构建过程、优化技巧及在工业级验证中的应用。最后,本文展望了OBDD技术与机器学习等先进技术的融合,以及OBDD工具和资源的未来发展趋势,强调了OBDD在AI硬件验证中的应用前景。
# 关键字
OBDD技术;故障模拟;自动测试图案生成
海康威视VisionMaster SDK故障排除:8大常见问题及解决方案速查

# 摘要
本文全面介绍了海康威视VisionMaster SDK的使用和故障排查。首先概述了SDK的特点和系统需求,接着详细探讨了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )