【TI杯赛题网络流算法详解】:流量最大化问题的解决之道
发布时间: 2024-12-02 15:13:40 阅读量: 1 订阅数: 6 

参考资源链接:[2020年TI杯模拟专题邀请赛赛题-A题单次周期信号再现装置](https://wenku.csdn.net/doc/6459dc3efcc539136824a4c0?spm=1055.2635.3001.10343)
# 1. 流量最大化问题与网络流算法概述
在当今信息时代,网络流量管理成为关键问题之一。流量最大化问题,即如何在网络中有效分配流量以达到流量最优,是网络工程和计算机科学中的核心研究课题。为解决这一问题,网络流算法应运而生。网络流算法是组合优化领域中一种用于解决流量分配问题的数学方法。从简单的运输调度到复杂的网络设计,网络流算法都发挥着重要作用。
## 1.1 流量最大化问题的定义
流量最大化问题通常涉及在一个有向图中,根据特定的网络结构和流量要求,确定各条边上的流量分配,以最大化从源点到汇点的总流量。这个问题可以视为一种资源优化问题,是运筹学中的经典问题之一。
## 1.2 网络流算法的重要性
网络流算法的重要性不仅体现在理论研究上,更在实际应用中体现出显著的价值。例如,在通信网络的带宽分配、供应链管理的物流调度以及网络设计中的流量控制等领域,网络流算法都发挥着举足轻重的作用。
网络流算法通过抽象网络为图,以流量为变量,利用图论和线性规划等数学工具,来解决实际问题中复杂的资源分配挑战。随着计算技术的进步,网络流算法也在不断演化,扩展到了新的应用领域和更复杂的问题模型。
# 2. 网络流理论基础
## 2.1 图论在流量网络中的应用
### 2.1.1 流量网络的定义
流量网络(Flow Network)是图论中的一个概念,用于表示在有向图中流动的资源,如水流、数据流、交通流等。在流量网络中,图的顶点被称为节点(vertices),而有向边(directed edges)表示节点之间的连接,这些边上的权重表示通过该边的最大流量。每个节点具有一个源节点(source vertex)和一个汇节点(sink vertex),分别代表着流量的起点和终点。网络流问题的目标是在满足网络中所有边流量限制和守恒的条件下,从源节点向汇节点输送尽可能多的流量。
### 2.1.2 关键概念与术语解析
在网络流理论中,一些关键的概念和术语包括:
- **容量(Capacity)**:边可以承受的最大流量。
- **流量(Flow)**:通过边的实际量值,不得超过边的容量。
- **残余网络(Residual Network)**:原网络的修改版,表示还可以增加多少流量。
- **增广路径(Augmenting Path)**:从源点到汇点,路径上的边都有未使用的容量。
- **割(Cut)**:将网络分成两部分,割的容量是切割边容量的总和,最小割问题即寻找容量最小的割。
## 2.2 网络流问题的形式化描述
### 2.2.1 网络流模型
网络流模型是网络流算法分析与设计的基础。一个标准的网络流模型包括以下要素:
- **顶点集合**:用V表示,包括源点s和汇点t。
- **边集合**:用E表示,每条边(u, v)都有一个与之关联的非负容量c(u, v)。
- **流量函数**:用f表示,对于每条边(u, v),f(u, v)是实际通过这条边的流量。
- **流量守恒定律**:对于除了源点和汇点以外的每个节点,流入该节点的流量总和等于流出该节点的流量总和。
- **容量限制**:对于每条边(u, v),通过这条边的流量f(u, v)不超过其容量c(u, v)。
### 2.2.2 网络流约束条件
网络流的约束条件决定了问题的可行解与最优解。在网络流问题中,有两个基本的约束条件:
1. **容量限制**:任何边(u, v)上的流量f(u, v)不能超过该边的容量c(u, v)。
2. **流量守恒**:对于除了源点s和汇点t的每个节点v,流入v的流量之和等于流出v的流量之和。
## 2.3 常用网络流算法理论
### 2.3.1 Ford-Fulkerson方法
Ford-Fulkerson方法是解决网络流问题的一个基本算法,通过寻找增广路径并增加流量来优化网络流。每次找到一条增广路径后,就通过这条路径推送尽可能多的流量,直到无法找到更多的增广路径为止。然而,该方法的时间复杂度依赖于网络的拓扑结构,可能导致较慢的收敛速度。
### 2.3.2 Edmonds-Karp算法
Edmonds-Karp算法是对Ford-Fulkerson方法的一个重要改进,它使用广度优先搜索(BFS)来寻找增广路径,确保每次都是沿着最短的未使用的路径进行。这种简单的改进极大地提高了算法效率,确保了在O(VE^2)的时间复杂度内解决问题,其中V是顶点的数量,E是边的数量。
### 2.3.3 Dinic算法
Dinic算法是另一种更高效的网络流算法,它通过构建多级图(Level Graph)和找到阻塞流(Blocking Flow)来工作。它分两步,首先在多级图中寻找增广路径来增加流量,然后再在实际图中进行调整。Dinic算法的时间复杂度为O(V^2E),这使得其在处理大规模网络时比Edmonds-Karp算法更为高效。
为了更深入地理解这些理论,让我们以代码和具体示例的形式进行剖析。通过实际编码实践和运行结果,我们可以更清晰地掌握这些算法的内部机制和应用策略。
# 3. 网络流算法的实现原理与代码剖析
## 3.1 算法实现的步骤分析
### 3.1.1 增广路径搜索
增广路径是网络流算法中的核心概念,它是从源点(source)到汇点(sink)之间的一条路径,且路径上的所有边都有剩余容量(即还有空间可以增加流量)。搜索增广路径的目的是找到可以增加流量的途径,从而逐步增大网络中的总流量。实现增广路径搜索通常使用广度优先搜索(BFS)或深度优先搜索(DFS)算法。
#### 伪代码示例:
```
function findAugmentingPath(graph, source, sink, parent):
visited = set()
queue = []
queue.append(source)
while queue is not empty:
currentVertex = queue.pop(0)
for neighbor in graph[currentVertex]:
if not visited.has(neighbor) and graph[currentVertex][neighbor] > 0:
queue.append(neighbor)
parent[neighbor] = currentVertex
if neighbor == sink:
return True
return False
```
在这个伪代码中,`graph` 表示当前网络的邻接矩阵或邻接表,`source` 是源点,`sink` 是汇点,`parent` 是一个记录路径信息的数组。函数返回 `True` 表示找到一条从源点到汇点的增广路径。
#### 参数说明与逻辑分析:
- `graph`: 用来表示网络中所有节点和边的数据结构。
- `source`: 网络中的起始节点。
- `sink`: 网络中的目标节点。
- `parent`: 用于追踪路径的数组,记录了每个节点的前驱节点。
- `visited`: 记录已经访问过的节点集合,防止重复访问。
- `queue`: 使用队列来执行广度优先搜索。
在执行过程中,我们首先将源点加入队列,并设置为已访问。然后,循环从队列中取出节点,访问其未访问的邻接节点,如果找到一个未访问且存在剩余容量的邻接节点,就将它加入队列,并更新该节点的父节点。如果访问到了汇点,则返回成功,表示找到了一条增广路径。
### 3.1.2 流量的反向调整
一旦找到一条增广路径,网络流算法接下来的步骤是调整(或称为推送)流量。这个过程涉及到增加流量沿增广路径,如果路径上的某条边已经满了,需要进行“回溯”或“退流”,

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【S7-1200 CAN通信调试秘籍】:故障定位与性能分析指南

参考资源链接:[西门子S7-1200 CAN总线通信教程:从组态到编程详解](https://wenku.csdn.net/doc/5f5h0svh9g?spm=1055.2635.3001.10343)
# 1. S7-1200 PLC和CAN通信基础
## 1.1 PLC与CAN通信简介
可编程逻辑控制器(PLC)在工业自动化领域扮演着核心角色,S7-1200 PLC是西门子生产的一款适用于小型自
【汇川机器人操作精通】:系统指令手册的全面解读与应用技巧
参考资源链接:[汇川机器人系统编程指令详解](https://wenku.csdn.net/doc/1qr1cycd43?spm=1055.2635.3001.10343)
# 1. 汇川机器人基础概览
在现代工业自动化领域中,汇川机器人是提高生产效率、降低人工成本的关键技术之一。本章将对汇川机器人进行基础性概览,帮助读者了解
VT System高可用性部署:构建无中断业务连续性的终极攻略
参考资源链接:[VT System中文使用指南全面解析与常见问题](https://wenku.csdn.net/doc/3xg8i4jone?spm=1055.2635.3001.10343)
# 1. VT System高可用性架构概述
在信息技术飞速发展的今天,系统停机时间的代价变得越来越昂贵。因此,高可用性(High Availability,简称HA)成为了衡量关键系统稳定性
MATLAB Simulink模块测试策略:确保模块可靠性的7个关键方法

参考资源链接:[Matlab Simulink电力线路模块详解:参数、应用与模型](https://wenku.c
高频率应用中的AMS1117:性能考量与实践案例分析
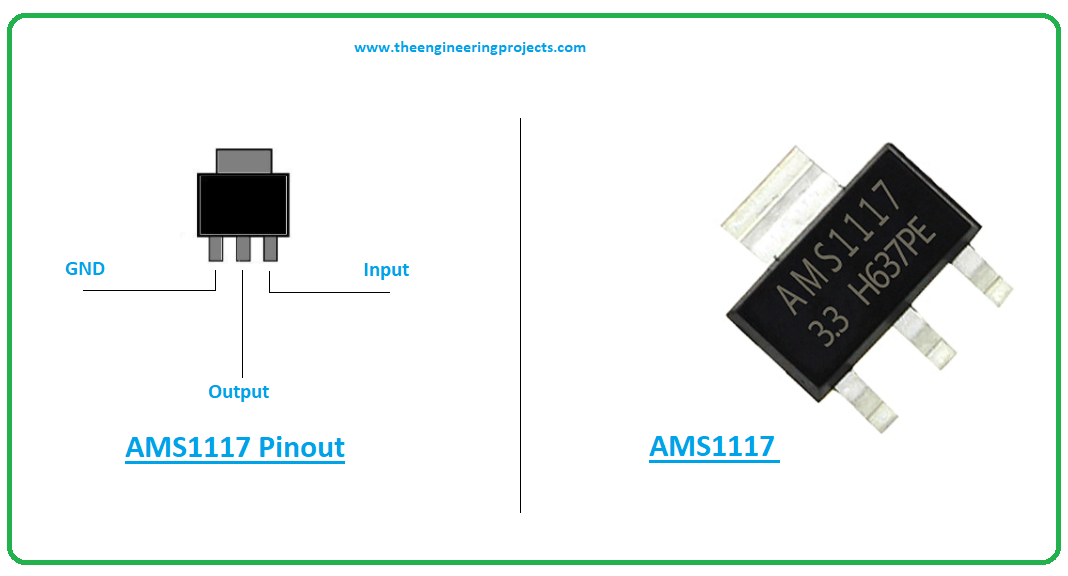
参考资源链接:[AMS1117稳压芯片的芯片手册](https://wenku.csdn.net/doc/646eba3fd12cbe7ec3f097d2?spm=1055.2635.3001.10343)
# 1. AMS1117稳压器概述
AMS1117稳压器是一种广泛使用的线性电压调节器,其设计目标是提供稳定且精确的电压输出,适用于各
【性能调优实战】:从输出类型出发优化MySQL Workbench性能

参考资源链接:[ANSYS Workbench后处理:结果查看技巧与云图、切片详解](https://wenku.csdn.net/doc/6412b69abe7fbd1778d474ed?spm=1055.2635.3001.10343)
# 1. MySQL Workbench性能问题概述
在当今数字化转型不断深化的背景下,数据库的性能直接关系到企业应用系统的响应速度和用户体验。MySQL Workbench 作为一
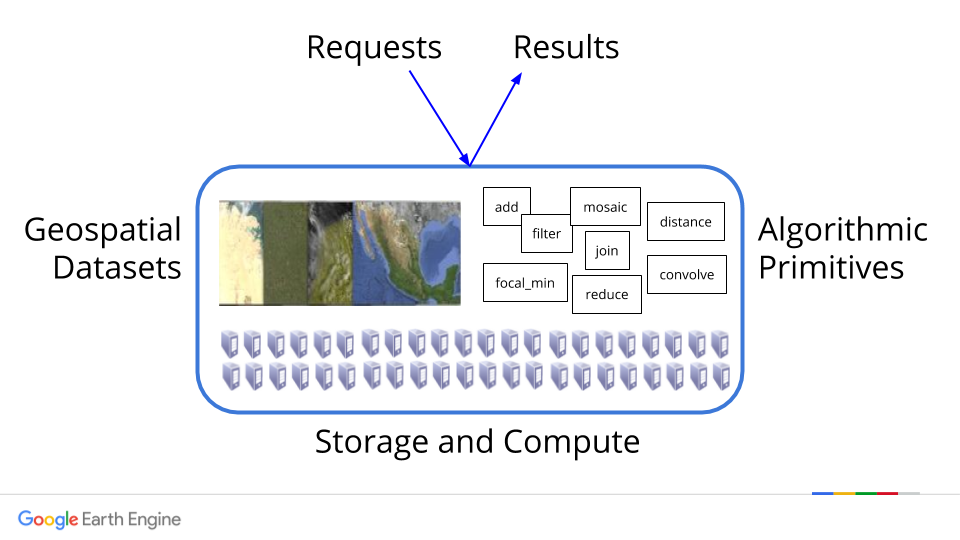
【GEE数据融合艺术】
参考资源链接:[Google Earth Engine中文教程:遥感大数据平台入门指南](https://wenku.csdn.net/doc/499nrqzhof?spm=1055.2635.3001.10343)
# 1. GEE数据融合的基础概念
## 1.1 GEE简介
Google Earth Engine(GEE)是一个云计算平台,提供对海量卫星影像和地理信
【多线程优化秘笈】:深入分析LAN9252的多线程处理能力并提供优化建议
参考资源链接:[MicroChip LAN9252:集成EtherCAT控制器的手册概述](https://wenku.csdn.net/doc/6412b46fbe7fbd1778d3f958?spm=1055.2635.3001.10343)
# 1. 多线程技术概述
多线程技术是现代软件开发中实现并发和提高应用程序性能的关键技术之一。本章首先简要介
【PowerBI全能指南】:从零基础到高级应用,一文掌握所有核心技巧
参考资源链接:[PowerBI使用指南:从入门到精通](https://wenku.csdn.net/doc/6401abd8cce7214c316e9b55?spm=1055.2635.3001.10343)
# 1. Power BI基础知识概览
Power BI是微软
【Mplus 8多层模型分析】:纵向数据与多层次模型实战对比
参考资源链接:[Mplus 8用户手册:输出、保存与绘图命令详解](https://wenku.csdn.net/doc/64603ee0543f8444888d8bfb?spm=1055.2635.3001.10343)
# 1. Mplus 8多层模型基础概念解析
在现代统计分析领域,多层模型已经成为一种被广泛应用的技术,特别是在处理具有层次结构的数据时,如教育、社会科学研究等。Mplus 作为一款功能强大的统计分析软件,特别适合用于多层次模型的研究。本章节将带领读者初步了解多层模型的基础概念,为后续章节的纵向数据分析和多层次模型的深入应用打下坚实基础。
## 1.1 多层模型的定义
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )