【伺服在精密定位中的角色】:追求极限精确的策略


在多轴伺服控制系统中实现同步精密运动
摘要
伺服系统在精密定位技术中起着至关重要的作用,它确保了机器能够以高精度和高速度执行任务。本文首先介绍了伺服控制理论的基础,包括其组成、工作原理、控制策略和系统稳定性。随后,文章深入探讨了伺服系统设计与优化的方法,如参数配置、抗扰动设计以及故障诊断与维护。本文还提供了多个应用实例,展示了伺服系统在制造业、科学研究和医疗设备领域的精密应用。最后,文章展望了未来伺服系统的发展趋势,其中包括智能化、自适应控制技术、环境友好型设计、微型化与集成化等方面。通过这些讨论,本文旨在为精密定位技术的持续进步提供参考和指导。
关键字
伺服系统;精密定位;控制策略;系统稳定性;故障诊断;智能化控制
参考资源链接:SYNTEC伺服操作手册:详述安装、配线与功能设置
1. 伺服系统在精密定位中的重要性
1.1 精密定位的基本要求
在精密工程领域,如半导体制造、光学器件安装、机器人技术和医疗设备中,对定位精度的要求极高。任何微小的误差都可能导致产品质量下降或者设备性能不稳定。因此,精密定位技术成为了这些领域中不可或缺的一部分。
1.2 伺服系统的作用
伺服系统是实现精密定位的关键技术之一。它通过接收控制指令,使用高精度的伺服电机和反馈装置,以高动态响应的特性快速、精确地移动机械部件到指定位置。此外,伺服系统还可以提供足够的力矩,在负载变化或有外部干扰的情况下保持定位精度。
1.3 精密定位的挑战与伺服系统解决方案
精密定位技术面临的挑战包括快速性与精确性的平衡、外部干扰的影响、以及长期运行下的性能稳定性。伺服系统通过引入先进的控制算法,例如PID控制或者更高级的控制策略,可以有效地应对这些挑战,为不同的应用场景提供定制化的解决方案,确保定位的精度和可靠性。
2. 伺服控制理论基础
2.1 伺服系统的组成与工作原理
2.1.1 伺服电机和驱动器
伺服电机是精密定位系统中的核心执行机构,它能够将电信号转换为机械旋转运动,并在控制系统的指令下快速准确地定位。伺服电机的类型多样,包括交流伺服电机和直流伺服电机。交流伺服电机由于其较好的控制性能和较低的维护成本,在工业应用中更为普遍。
伺服驱动器作为伺服电机的控制部分,负责接收控制器的指令信号,并将其转换为电机的功率信号,进而控制电机的速度、位置和加速度。现代伺服驱动器通常具备脉冲输出、模拟量控制和网络通讯等多种接口,以适应复杂的控制需求。
2.1.2 位置反馈与控制循环
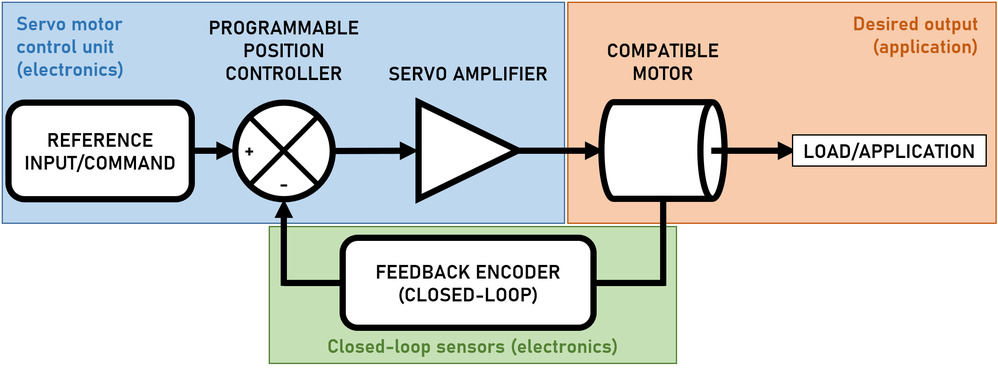
伺服系统中的位置反馈是通过编码器来实现的。编码器可以是增量式或绝对式,它们能够实时监测电机轴的旋转角度或位置,并将这些数据反馈给控制器。在控制循环中,控制器根据目标位置和当前位置的差值来计算出控制电机的指令。
在伺服系统中,存在一个闭环控制机制,即通过不断地采样位置反馈数据,控制器实时调整电机的运动状态,以消除误差并实现精确的定位。这一连续的校正过程保证了伺服系统的高精度和响应速度。
2.2 控制策略与算法
2.2.1 PID控制理论
PID(比例-积分-微分)控制是伺服系统中最基本也是应用最为广泛的控制策略之一。PID控制器通过计算设定值与实际值之间的误差,并将这个误差进行比例、积分和微分运算,来产生一个控制信号以达到减少误差的目的。
- 比例(P)控制用于确定系统响应的速度;
- 积分(I)控制用于消除稳态误差;
- 微分(D)控制用于预测误差的趋势,以防止系统产生过冲。
一个典型的PID控制器方程可以表示为:
- u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
其中 u(t) 是控制信号,Kp、Ki 和 Kd 分别是比例、积分和微分的控制系数,e(t) 是设定值与实际值之间的误差。
2.2.2 高级控制策略
随着技术的发展,各种高级控制策略也被应用于伺服系统中,以应对更加复杂的应用环境。例如,模糊控制、神经网络控制和预测控制等。这些控制策略能够处理非线性、时变和不确定性系统,提供更好的动态性能和鲁棒性。
模糊控制通过模拟人的决策过程来控制一个系统,它不需要精确的数学模型。神经网络控制通过学习历史数据来预测系统行为。预测控制则通过建立一个预测模型来优化未来的控制性能。
2.3 系统稳定性和动态响应
2.3.1 系统稳定性分析
系统的稳定性是伺服控制系统设计中的关键指标之一。一个稳定系统能够在受到外部扰动或内部参数变化时,仍然保持其性能。系统稳定性分析通常涉及到建立系统的数学模型,并运用劳斯-赫尔维茨准则或者奈奎斯特准则等方法来判断系统的稳定性。
2.3.2 提升动态响应的措施
为了提升伺服系统的动态响应,需要采取以下措施:
- 优化PID参数:通过调整PID控制算法中的比例、积分和微分参数,可以提升系统的响应速度和稳定性。
- 采用先进的控制算法:如使用前馈控制、预测控制等策略,可以有效减少超调和延迟。
- 提高系统的采样频率:增加控制循环的采样频率能够使系统更快地响应外部变化。
下表展示了一种常见方法对于提升动态响应的影响:
| 控制方法 | 稳定性 | 响应速度 | 超调量 | 鲁棒性 |
|---|---|---|---|---|
| 标准PID | 中等 | 较快 | 有 | 较好 |
| PID+前馈控制 | 较高 | 更快 | 较少 | 较好 |
| 预测控制 | 较高 | 最快 | 最少 | 最好 |
通过以上的分析和优化措施,伺服系统可以在保证稳定性的同时,实现更佳的动态性能,满足精密定位的需求。
3. 伺服系统设计与优化
在上一章节,我们深入了解了伺服控制理论的基础,包括伺服系统的组成、工作原理以及控制策略与算法。这一章将带您进入伺服系统设计与优化的实战领域,从参数配置到抗扰动与负载适应性,再到故障诊断与维护,我们将逐一深入探讨如何提升伺服系统性能。
3.1 伺服系统的参数配置
3.1.1 参数调谐的基本步骤
在设计伺服系统时,参数调谐是确保系统性能满足特定应用要求的关键步骤。一个调谐得当的系统能够确保精确的运动控制和最优的动态响应。调谐过程通常涉及以下几个步骤:
- 识别系统特性:首先需要分析系统的传递函数,了解其动态特性和频率响应。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )

专栏目录

文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
动作监视效能提升:启明星辰防火墙性能调优实战指南
【Quartus调试高手】
开发团队协作效率提升:调试码助手180天的协作应用
【PELCO-D协议监控系统搭建】:从零到专家的全程指导
【显示符号-IDL模块化编程宝典】:构建可复用代码库的策略
医院预约挂号系统的移动端适配与优化最佳实践
性能瓶颈不再:ViewPager预加载深度分析指南
项目配置管理计划最佳实践:构建高效配置管理的10大关键点
Drools WorkBench规则开发全攻略:一步到位的流程解析
现代优化问题的解决之道:ADMM算法的优势分析


专栏目录
文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )