YOLO在自动驾驶中的应用:实现车辆实时目标检测
发布时间: 2024-08-19 00:10:53 阅读量: 23 订阅数: 41 

yolo-使用Yolov2实现的车辆目标检测算法.zip
# 1. YOLO概述**
YOLO(You Only Look Once)是一种实时目标检测算法,以其速度和准确性而闻名。它通过一次卷积神经网络(CNN)前向传递来检测图像中的所有对象,从而实现了实时性能。
与传统的目标检测算法不同,YOLO不需要区域建议或候选框。它将输入图像划分为网格,并为每个网格单元预测多个边界框和类概率。这种单次前向传递的方法使得YOLO能够以极高的速度执行目标检测。
# 2. YOLO算法原理
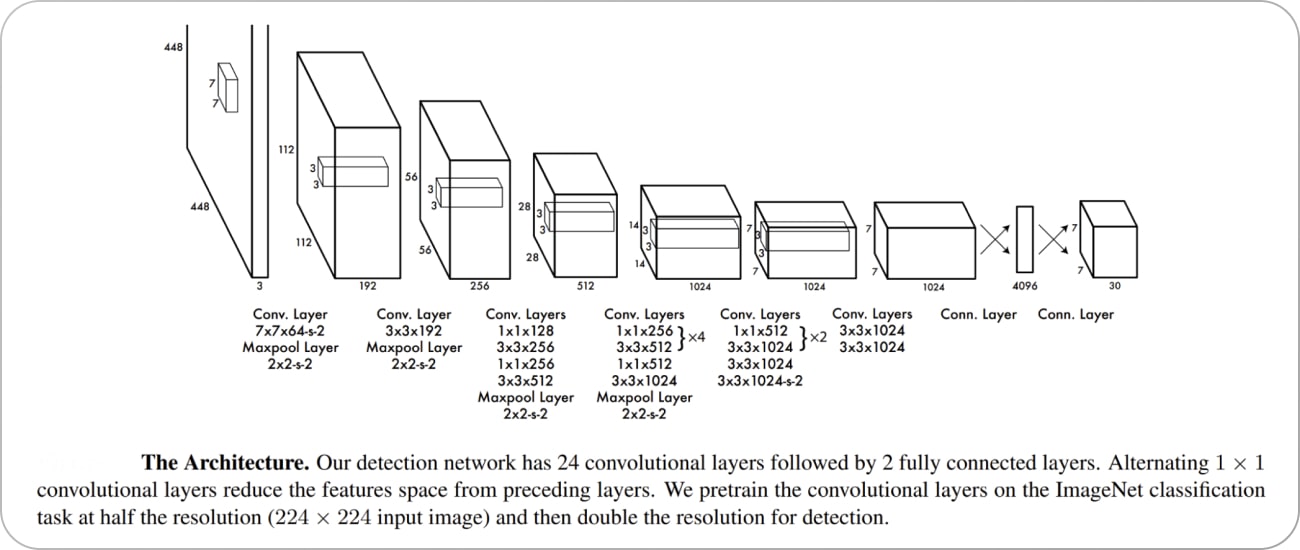
### 2.1 YOLOv1网络结构
YOLOv1网络结构主要由卷积层、池化层和全连接层组成。
**2.1.1 卷积层**
卷积层是YOLO网络中的主要特征提取层。它使用卷积核在输入数据上滑动,生成特征图。卷积核的大小和数量决定了提取的特征的尺度和复杂性。
**2.1.2 池化层**
池化层用于减少特征图的尺寸和计算量。它使用池化核在特征图上滑动,将相邻的元素合并成一个值。池化核的大小和步长决定了池化的程度。
**2.1.3 全连接层**
全连接层用于将提取的特征映射到输出。它将特征图中的所有元素连接到一个向量,然后使用线性变换和激活函数生成最终输出。
### 2.2 YOLOv2网络改进
YOLOv2网络在YOLOv1的基础上进行了改进,包括:
**2.2.1 Batch Normalization**
Batch Normalization是一种正则化技术,可以提高模型的训练稳定性和泛化能力。它通过将每个批次中的激活值归一化到均值为0、方差为1的分布来实现。
**2.2.2 Anchor Box**
Anchor Box是一种先验框,用于指导网络预测目标的边界框。YOLOv2使用9个Anchor Box,每个Anchor Box对应一个特定的尺度和长宽比。
### 2.3 YOLOv3网络优化
YOLOv3网络在YOLOv2的基础上进一步进行了优化,包括:
**2.3.1 Darknet-53骨干网络**
Darknet-53是一个深度卷积神经网络,用于作为YOLOv3的骨干网络。它具有53个卷积层,可以提取丰富的特征。
**2.3.2 Feature Pyramid Network**
Feature Pyramid Network(FPN)是一种特征融合技术,可以生成不同尺度的特征图。YOLOv3使用FPN将不同尺度的特征图融合在一起,从而提高了检测不同大小目标的能力。
**代码块:**
```python
import cv2
import numpy as np
# 加载YOLOv3模型
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg")
# 设置输入图像
image = cv2.imread("image.jpg")
# 预处理图像
blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (416, 416), (0, 0, 0), swapRB=True, crop=False)
# 设置输入到网络
net.setInput(blob)
# 前向传播
detections = net.forward()
# 解析
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PyroSiM中文版模拟效率革命:8个实用技巧助你提升精确度与效率
# 摘要
PyroSiM是一款强大的模拟软件,广泛应用于多个领域以解决复杂问题。本文从PyroSiM中文版的基础入门讲起,逐渐深入至模拟理论、技巧、实践应用以及高级技巧与进阶应用。通过对模拟理论与效率提升、模拟模型精确度分析以及实践案例的探讨,本文旨在为用户提供一套完整的PyroSiM使用指南。文章还关注了提高模拟效率的实践操作,包括优化技巧和模拟工作流的集成。高级
QT框架下的网络编程:从基础到高级,技术提升必读
# 摘要
QT框架下的网络编程技术为开发者提供了强大的网络通信能力,使得在网络应用开发过程中,可以灵活地实现各种网络协议和数据交换功能。本文介绍了QT网络编程的基础知识,包括QTcpSocket和QUdpSocket类的基本使用,以及QNetworkAccessManager在不同场景下的网络访问管理。进一步地,本文探讨了QT网络编程中的信号与槽
优化信号处理流程:【高效傅里叶变换实现】的算法与代码实践

# 摘要
傅里叶变换是现代信号处理中的基础理论,其高效的实现——快速傅里叶变换(FFT)算法,极大地推动了数字信号处理技术的发展。本文首先介绍了傅里叶变换的基础理论和离散傅里叶变换(DFT)的基本概念及其计算复杂度。随后,详细阐述了FFT算法的发展历程,特别是Coo
MTK-ATA核心算法深度揭秘:全面解析ATA协议运作机制

# 摘要
本文深入探讨了MTK-ATA核心算法的理论基础、实践应用、高级特性以及问题诊断与解决方法。首先,本文介绍了ATA协议和MTK芯片架构之间的关系,并解析了ATA协议的核心概念,包括其命令集和数据传输机制。其次,文章阐述了MTK-ATA算法的工作原理、实现框架、调试与优化以及扩展与改进措施。此外,本文还分析了MTK-ATA算法在多
【MIPI摄像头与显示优化】:掌握CSI与DSI技术应用的关键
# 摘要
本文全面介绍了MIPI摄像头与显示技术,从基本概念到实际应用进行了详细阐述。首先,文章概览了MIPI摄像头与显示技术的基础知识,并对比分析了CSI与DSI标准的架构、技术要求及适用场景。接着,文章探讨了MIPI摄像头接口的配置、控制、图像处理与压缩技术,并提供了高级应用案例。对于MIPI显示接口部分,文章聚焦于配置、性能调优、视频输出与图形加速技术以及应用案例。第五章对性能测试工具与
揭秘PCtoLCD2002:如何利用其独特算法优化LCD显示性能

# 摘要
PCtoLCD2002作为一种高性能显示优化工具,在现代显示技术中占据重要地位。本文首先概述了PCtoLCD2002的基本概念及其显示性能的重要性,随后深入解析了其核心算法,包括理论基础、数据处理机制及性能分析。通过对算法的全面解析,探讨了算法如何在不同的显示设备上实现性能优化,并通过实验与案例研究展示了算法优化的实际效果。文章最后探讨了PCtoLCD2002算法的进阶应用和面临
DSP系统设计实战:TI 28X系列在嵌入式系统中的应用(系统优化全攻略)
# 摘要
TI 28X系列DSP系统作为一种高性能数字信号处理平台,广泛应用于音频、图像和通信等领域。本文旨在提供TI 28X系列DSP的系统概述、核心架构和性能分析,探讨软件开发基础、优化技术和实战应用案例。通过深入解析DSP系统的设计特点、性能指标、软件开发环境以及优化策略,本文旨在指导工程师有效地利用DSP系统的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )