虚数单位i在控制理论中的应用:传递函数和稳定性分析的利器
发布时间: 2024-07-11 16:45:59 阅读量: 101 订阅数: 69 

扫频法求开环传递函数,开环传递函数求截止频率,matlab
# 1. 虚数单位i在控制理论中的简介
虚数单位i是控制理论中一个重要的概念,它在传递函数的解析、稳定性分析、控制器设计和控制系统仿真中发挥着至关重要的作用。
i的数学定义为i² = -1,它允许我们表示和操作复数,即具有实部和虚部的数字。在控制理论中,虚数单位i用于表示频率和阻尼等与时间相关的量。
通过引入虚数单位i,我们可以将控制系统建模为复数传递函数,从而简化分析和设计过程。传递函数的极点和零点,这些复数点,提供了有关系统稳定性和动态响应的重要信息。
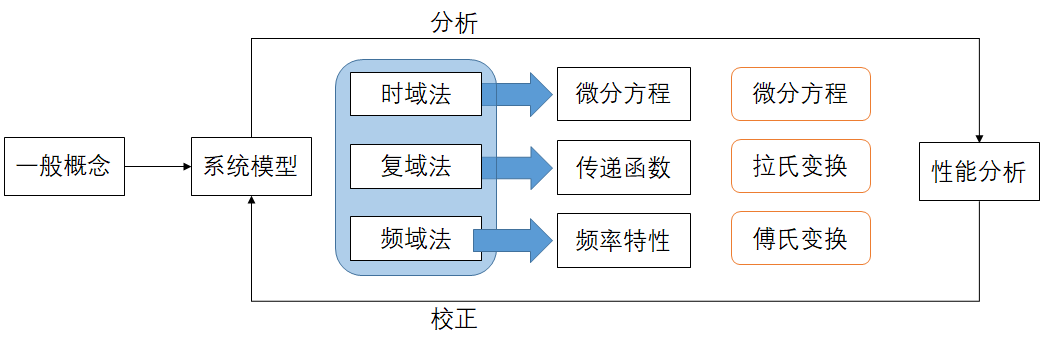
# 2. 传递函数的解析与稳定性分析
### 2.1 传递函数的概念和性质
#### 2.1.1 传递函数的定义和表示形式
传递函数是控制系统中描述输入与输出关系的数学模型,它表示系统在时域上的输入输出特性。传递函数可以用以下形式表示:
```
G(s) = Y(s) / X(s)
```
其中:
* G(s) 是传递函数
* X(s) 是输入信号的拉普拉斯变换
* Y(s) 是输出信号的拉普拉斯变换
传递函数可以表示为分式形式:
```
G(s) = N(s) / D(s)
```
其中:
* N(s) 是分子的多项式
* D(s) 是分母的多项式
#### 2.1.2 传递函数的极点和零点
传递函数的极点和零点是传递函数分母和分子多项式根的集合。极点表示系统响应中的衰减或不稳定模式,而零点表示系统响应中的放大或稳定模式。
* **极点:**传递函数分母多项式 D(s) 的根称为极点。极点的实部表示衰减率,虚部表示振荡频率。
* **零点:**传递函数分子多项式 N(s) 的根称为零点。零点的实部表示放大率,虚部表示相移。
### 2.2 稳定性分析的理论基础
#### 2.2.1 奈奎斯特稳定性判据
奈奎斯特稳定性判据是判断线性时不变系统稳定性的图形方法。该判据基于以下定理:
**奈奎斯特稳定性判据:**如果开环传递函数 G(s)H(s) 的奈奎斯特图不包围原点,则闭环系统稳定。
#### 2.2.2 波德图法
波德图法是另一种判断线性时不变系统稳定性的图形方法。该方法基于以下步骤:
1. 绘制开环传递函数 G(s)H(s) 的幅频响应图和相频响应图。
2. 在幅频响应图上,判断增益裕度和相位裕度。
3. 根据增益裕度和相位裕度,判断系统的稳定性。
### 2.3 虚数单位i在传递函数分析中的应用
#### 2.3.1 频率响应分析
虚数单位i在传递函数分析中用于表示复频率。复频率可以表示为:
```
s = σ + jω
```
其中:
* σ 是实部,表示衰减率
* ω 是虚部,表示振荡频率
通过代入复频率,可以得到传递函数的频率响应:
```
G(jω) = |G(jω)|e^(j∠G(jω))
```
其中:
* |G(jω)| 是幅度响应
* ∠G(jω) 是相位响应
#### 2.3.2 阻尼比和自然频率的计算
虚数单位i还用于计算传递

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《虚数单位:深入探索数学中的神秘符号》专栏全面解析了虚数单位 i 在数学、物理、工程和计算机科学等领域的广泛应用。从其定义和几何意义到在复数、微积分、物理和信号处理中的关键作用,该专栏深入探讨了 i 的奥秘。此外,它还揭示了 i 在控制理论、计算机科学、统计学和复分析中的应用,提供了对复平面、欧拉公式和复函数的深入理解。通过深入剖析 i 的代数性质、三角形式和指数形式,该专栏为读者提供了对这个看似抽象概念的全面认识。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【VC709开发板原理图进阶】:深度剖析FPGA核心组件与性能优化(专家视角)

# 摘要
本论文首先对VC709开发板进行了全面概述,并详细解析了其核心组件。接着,深入探讨了FPGA的基础理论及其架构,包括关键技术和设计工具链。文章进一步分析了VC709开发板核心组件,着重于FPGA芯片特性、高速接口技术、热管理和电源设计。此外,本文提出了针对VC709性能优化
IP5306 I2C同步通信:打造高效稳定的通信机制

# 摘要
本文系统地阐述了I2C同步通信的基础原理及其在现代嵌入式系统中的应用。首先,我们介绍了IP5306芯片的功能和其在同步通信中的关键作用,随后详细分析了实现高效稳定I2C通信机制的关键技术,包括通信协议解析、同步通信的优化策略以及IP5306与I2C的集成实践。文章接着深入探讨了IP5306 I2C通信的软件实现,涵盖软件架
Oracle数据库新手指南:DBF数据导入前的准备工作
# 摘要
本文旨在详细介绍Oracle数据库的基础知识,并深入解析DBF数据格式及其结构,包括文件发展历程、基本结构、数据类型和字段定义,以及索引和记录机制。同时,本文指导读者进行环境搭建和配置,包括Oracle数据库软件安装、网络设置、用户账户和权限管理。此外,本文还探讨了数据导入工具的选择与使用方法,介绍了SQL
FSIM对比分析:图像相似度算法的终极对决
# 摘要
本文首先概述了图像相似度算法的发展历程,重点介绍了FSIM算法的理论基础及其核心原理,包括相位一致性模型和FSIM的计算方法。文章进一步阐述了FSIM算法的实践操作,包括实现步骤和性能测试,并探讨了针对特定应用场景的优化技巧。在第四章中,作者对比分析了FSIM与
应用场景全透视:4除4加减交替法在实验报告中的深度分析
# 摘要
本文综合介绍了4除4加减交替法的理论和实践应用。首先,文章概述了该方法的基础理论和数学原理,包括加减法的基本概念及其性质,以及4除4加减交替法的数学模型和理论依据。接着,文章详细阐述了该方法在实验环境中的应用,包括环境设置、操作步骤和结果分析。本文还探讨了撰写实验报告的技巧,包括报告的结构布局、数据展示和结论撰写。最后,通过案例分析展示了该方法在不同领域的应用,并对实验报告的评价标准与质量提升建议进行了讨论。本文旨在
电子设备冲击测试必读:IEC 60068-2-31标准的实战准备指南
# 摘要
IEC 60068-2-31标准为冲击测试提供了详细的指导和要求,涵盖了测试的理论基础、准备策划、实施操作、标准解读与应用、以及提升测试质量的策略。本文通过对冲击测试科学原理的探讨,分类和方法的分析,以及测试设备和工具的选择,明确了测试的执行流程。同时,强调了在测试前进行详尽策划的重要性,包括样品准备、测试计划的制定以及测试人员的培训。在实际操作中,本
【神经网络】:高级深度学习技术提高煤炭价格预测精度

# 摘要
随着深度学习技术的飞速发展,该技术已成为预测煤炭价格等复杂时间序列数据的重要工具。本文首先介绍了深度学习与煤炭价格预测的基本概念和理论基础,包括神经网络、损失函数、优化器和正则化技术。随后,文章详细探讨了深度学习技术在煤炭价格预测中的具体应用,如数据预处理、模型构建与训练、评估和调优策略。进一步,本文深入分析了高级深度学习技术,包括卷积神经网络(CNN)、循环神经网络(RNN)和长
电子元器件寿命预测:JESD22-A104D温度循环测试的权威解读
# 摘要
电子元器件在各种电子设备中扮演着至关重要的角色,其寿命预测对于保证产品质量和可靠性至关重要。本文首先概述了电子元器件寿命预测的基本概念,随后详细探讨了JESD22-A104D标准及其测试原理,特别是温度循环测试的理论基础和实际操作方法。文章还介绍了其他加速老化测试方法和寿命预测模型的优化,以及机器学习技术在预测中的应用。通过实际案例分析,本文深入讨论了预测模型的建立与验证。最后,文章展望了未来技术创新、行
【数据库连接池详解】:高效配置Oracle 11gR2客户端,32位与64位策略对比
# 摘要
本文对Oracle 11gR2数据库连接池的概念、技术原理、高效配置、不同位数客户端策略对比,以及实践应用案例进行了系统的阐述。首先介绍了连接池的基本概念和Oracle 11gR2连接池的技术原理,包括其架构、工作机制、会话管理、关键技术如连接复用、负载均衡策略和失效处理机制。然后,文章转向如何高效配置Oracle 11gR2连接池,涵盖环境准备、安装步骤、参数
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )