STM32单片机引脚复用配置指南:解锁无限可能,玩转单片机
发布时间: 2024-07-03 06:38:38 阅读量: 219 订阅数: 76 

STM32单片机管脚寄存器配置工具
# 1. STM32单片机引脚复用概述
STM32单片机引脚复用是一种强大的功能,它允许单片机将单个物理引脚配置为多个不同的功能。这使得单片机可以灵活地连接到各种外设,同时最大限度地减少所需的引脚数量。
引脚复用配置可以通过标准库函数或直接操作GPIO寄存器来实现。标准库函数提供了一种简单易用的方法,而寄存器操作提供了对配置过程的更精细控制。
在本章中,我们将介绍引脚复用配置的基本概念,包括原理、机制、寄存器结构和时钟配置。这些知识为后续章节中更深入的配置实践和高级应用奠定了基础。
# 2. 引脚复用配置理论基础
### 2.1 引脚复用原理和机制
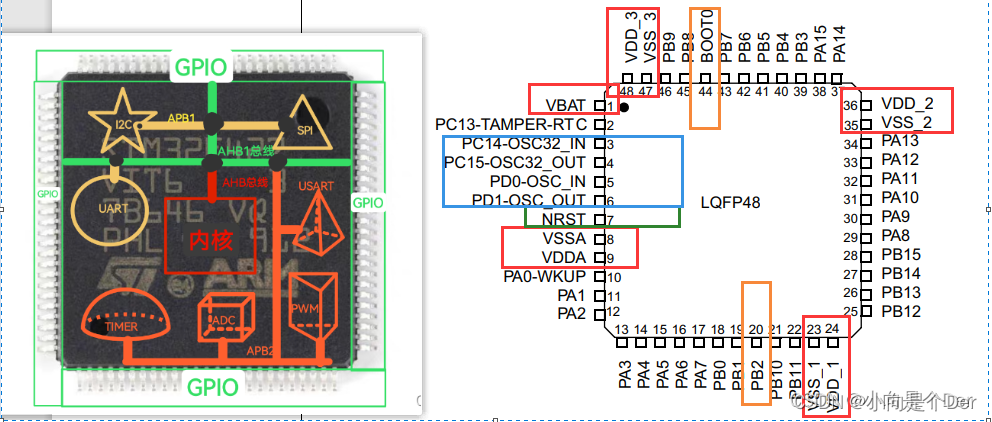
引脚复用是STM32单片机的一项重要特性,它允许单个物理引脚被配置为多个不同的功能。这使得单片机能够在有限的引脚资源下实现丰富的功能。
引脚复用的原理是基于多路复用器(MUX)的。每个引脚都连接到一个或多个MUX,MUX可以将引脚的信号路由到不同的功能模块。通过配置MUX,可以将引脚分配给不同的外设或功能。
### 2.2 GPIO寄存器结构和操作
GPIO(通用输入/输出)寄存器是控制引脚复用的主要寄存器组。每个GPIO端口都有一个寄存器组,包括以下寄存器:
- **MODER**:模式寄存器,用于配置引脚的模式(输入、输出、复用功能)
- **OTYPER**:输出类型寄存器,用于配置引脚的输出类型(推挽输出、开漏输出)
- **OSPEEDR**:输出速度寄存器,用于配置引脚的输出速度(低速、中速、高速)
- **PUPDR**:上拉/下拉寄存器,用于配置引脚的上拉/下拉电阻
- **IDR**:输入数据寄存器,用于读取引脚的输入电平
- **ODR**:输出数据寄存器,用于设置引脚的输出电平
通过对这些寄存器的操作,可以配置引脚的复用功能、输出类型、速度和上拉/下拉电阻。
### 2.3 时钟配置和引脚复用
引脚复用需要外设时钟的支持。在配置引脚复用之前,必须先为相关的时钟模块使能时钟。时钟配置通常在系统初始化阶段完成,可以通过以下步骤实现:
```c
// 使能 GPIOA 时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
// 使能 USART1 时钟
RCC->APB2ENR |= RCC_APB2ENR_USART1EN;
```
时钟使能后,就可以配置引脚复用。例如,要将 PA9 引脚配置为 USART1 的 TX 引脚,可以执行以下操作:
```c
// 配置 PA9 为复用功能
GPIOA->MODER &= ~GPIO_MODER_MODER9;
GPIOA->MODER |= GPIO_MODER_MODER9_1;
// 配置 PA9 为推挽输出
GPIOA->OTYPER &= ~GPIO_OTYPER_OT_9;
// 配置 PA9 为高速输出
GPIOA->OSPEEDR |= GPIO_OSPEEDR_OSPEEDR9;
// 配置 PA9 为无上拉/下拉电阻
GPIOA->PUPDR &= ~GPIO_PUPDR_PUPDR9;
```
通过这些配置,PA9 引脚被复用为 USART1 的 TX 引脚,并具有推挽输出、高速输出和无上拉/下拉电阻的特性。
# 3. 引脚复用配置实践指南
### 3.1 标准库函数配置引脚复用
STM32标准库提供了丰富的函数来简化引脚复用配置,这些函数封装了底层寄存器操作,使用起来非常方便。
```c
/* 使用标准库函数配置引脚复用 */
HAL_GPIO_InitTypeDef GPIO_InitStruct;
/* 初始化GPIO结构体 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
/* 初始化GPIO引脚 */
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
```
**逻辑分析:**
* `HAL_GPIO_Init()`函数用于初始化GPIO引脚,它接收一个GPIO结构体作为参数。
* GPIO结构体包含了引脚号、模式、上拉/下拉电阻和速度等配置参数。
* 在本例中,我们配置GPIOC引脚13为推挽输出模式,无上拉/下拉电阻,速度为低速。
### 3.2 寄存器操作配置引脚复用
除了使用标准库函数,我们还可以直接操作GPIO寄存器来配置引脚复用。
```c
/* 使用寄存器操作配置引脚复用 */
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN; // 使能GPIOC时钟
GPIOC->MODER &= ~(3 << (13 * 2)); // 清除MODER寄存器对应位
GPIOC->MODER |= (1 << (13 * 2)); // 设置MODER寄存器对应位为输出模式
GPIOC->OTYPER &= ~(1 << 13); // 设置输出类型为推挽输出
GPIOC->PUPDR &= ~(3 << (13 * 2)); // 清除PUPDR寄存器对应位
```
**逻辑分析:**
* 首先,我们需要使能GPIOC时钟,以访问GPIOC寄存器。
* 然后,我们操作MODER寄存器来设置引脚模式,将其设置为输出模式。
* 接下来,我们操作OTYPER寄存器来设置输出类型,将其设置为推挽输出。
* 最后,我们操作PUPDR寄存器来清除上拉/下拉电阻,将其设置为无上拉/下拉电阻。
### 3.3 外部中断和DMA配置引脚复用
引脚复用不仅可以用于配置GPIO模式,还可以用于配置外部中断和DMA。
#### 3.3.1 外部中断配置
```c
/* 使用寄存器操作配置外部中断 */
RCC->APB2ENR |= RCC_APB2ENR_SYSCFGEN; // 使能SYSCFG时钟
SYSCFG->EXTICR[3] |= (0 << (4 * 0)); // 将EXTI4映射到GPIOC
EXTI->IMR |= (1 << 4); // 使能EXTI4中断
EXTI->FTSR |= (1 << 4); // 设置EXTI4为下降沿触发
```
**逻辑分析:**
* 首先,我们需要使能SYSCFG时钟,以访问SYSCFG寄存器。
* 然后,我们操作EXTICR寄存器来将外部中断4映射到GPIOC。
* 接下来,我们操作EXTI->IMR寄存器来使能外部中断4。
* 最后,我们操作EXTI->FTSR寄存器来设置外部中断4为下降沿触发。
#### 3.3.2 DMA配置
```c
/* 使用寄存器操作配置DMA */
RCC->AHB1ENR |= RCC_AHB1ENR_DMA2EN; // 使能DMA2时钟
DMA2_Channel1->CCR |= DMA_CCR_MEM2MEM; // 设置DMA为内存到内存传输
DMA2_Channel1->CPAR = (uint32_t)&src; // 设置源地址
DMA2_Channel1->CMAR = (uint32_t)&dst; // 设置目标地址
DMA2_Channel1->CNDTR = sizeof(data); // 设置传输数据量
```
**逻辑分析:**
* 首先,我们需要使能DMA2时钟,以访问DMA2寄存器。
* 然后,我们操作DMA2_Channel1->CCR寄存器来设置DMA传输模式,将其设置为内存到内存传输。
* 接下来,我们操作DMA2_Channel1->CPAR寄存器来设置源地址。
* 然后,我们操作DMA2_Channel1->CMAR寄存器来设置目标地址。
* 最后,我们操作DMA2_Channel1->CNDTR寄存器来设置传输数据量。
# 4. 引脚复用高级应用**
### 4.1 引脚复用多路复用技术
引脚复用多路复用技术允许单个引脚同时连接到多个外设。这对于资源受限的嵌入式系统非常有用,因为它可以最大限度地利用可用引脚。
#### 多路复用原理
多路复用通过使用称为多路复用器的特殊硬件实现。多路复用器是一个具有多个输入和一个输出的逻辑电路。通过选择信号,多路复用器可以将任何输入连接到输出。
在STM32单片机中,多路复用器集成在GPIO外设中。每个GPIO引脚都可以连接到多个外设,具体取决于单片机的型号和引脚配置。
#### 多路复用配置
要配置引脚复用多路复用,需要使用`GPIO_InitTypeDef`结构体。该结构体包含以下成员:
```c
typedef struct
{
uint32_t GPIO_Pin; /*!< Specifies the GPIO pin connected to the peripheral.
This parameter can be one of all GPIO pins for the selected device. */
GPIOMode_TypeDef GPIO_Mode; /*!< Specifies the operating mode for the selected GPIO pin.
This parameter can be one of the following values:
@arg GPIO_Mode_AIN: Analog input mode
@arg GPIO_Mode_IN: Input mode
@arg GPIO_Mode_OUT: Output mode
@arg GPIO_Mode_AF: Alternate function mode */
GPIOSpeed_TypeDef GPIO_Speed; /*!< Specifies the I/O speed for the selected GPIO pin.
This parameter can be one of the following values:
@arg GPIO_Speed_Low: Low speed
@arg GPIO_Speed_Medium: Medium speed
@arg GPIO_Speed_Fast: Fast speed
@arg GPIO_Speed_High: High speed */
GPIOOType_TypeDef GPIO_OType; /*!< Specifies the output type for the selected GPIO pin.
This parameter can be one of the following values:
@arg GPIO_OType_PP: Push-pull output
@arg GPIO_OType_OD: Open-drain output */
GPIOPull_TypeDef GPIO_Pull; /*!< Specifies the pull-up or pull-down resistor for the selected GPIO pin.
This parameter can be one of the following values:
@arg GPIO_Pull_No: No pull-up or pull-down resistor
@arg GPIO_Pull_Up: Pull-up resistor
@arg GPIO_Pull_Down: Pull-down resistor */
uint8_t GPIO_Alternate; /*!< Specifies the alternate function for the selected GPIO pin.
This parameter can be one of the following values:
@arg GPIO_AF0: Alternate function 0
@arg GPIO_AF1: Alternate function 1
@arg GPIO_AF2: Alternate function 2
@arg GPIO_AF3: Alternate function 3
@arg GPIO_AF4: Alternate function 4
@arg GPIO_AF5: Alternate function 5
@arg GPIO_AF6: Alternate function 6
@arg GPIO_AF7: Alternate function 7 */
}GPIO_InitTypeDef;
```
要配置引脚复用多路复用,请按照以下步骤操作:
1. 初始化`GPIO_InitTypeDef`结构体。
2. 设置`GPIO_Pin`成员以指定要配置的引脚。
3. 设置`GPIO_Mode`成员以指定引脚模式。
4. 设置`GPIO_Speed`成员以指定引脚速度。
5. 设置`GPIO_OType`成员以指定引脚输出类型。
6. 设置`GPIO_Pull`成员以指定引脚下拉或上拉电阻。
7. 设置`GPIO_Alternate`成员以指定引脚备用功能。
8. 调用`HAL_GPIO_Init()`函数以初始化引脚。
### 4.2 引脚复用与模拟外设的结合
引脚复用还可以用于连接模拟外设,例如ADC和DAC。这允许单片机在模拟和数字信号之间进行转换。
#### 模拟外设连接
要连接模拟外设,需要使用`ADC_InitTypeDef`或`DAC_InitTypeDef`结构体。这些结构体包含以下成员:
```c
typedef struct
{
uint32_t ADC_Resolution; /*!< Specifies the resolution of the ADC.
This parameter can be one of the following values:
@arg ADC_Resolution_12b: 12-bit resolution
@arg ADC_Resolution_10b: 10-bit resolution
@arg ADC_Resolution_8b: 8-bit resolution
@arg ADC_Resolution_6b: 6-bit resolution */
uint32_t ADC_ScanConvMode; /*!< Specifies the scan conversion mode.
This parameter can be one of the following values:
@arg ADC_ScanConvMode_Disable: Scan conversion mode is disabled
@arg ADC_ScanConvMode_Continuous: Scan conversion mode is continuous
@arg ADC_ScanConvMode_Single: Scan conversion mode is single */
uint32_t ADC_ContinuousConvMode; /*!< Specifies the continuous conversion mode.
This parameter can be one of the following values:
@arg ADC_ContinuousConvMode_Disable: Continuous conversion mode is disabled
@arg ADC_ContinuousConvMode_Enable: Continuous conversion mode is enabled */
uint32_t ADC_ExternalTrigConvEdge; /*!< Specifies the external trigger conversion edge.
This parameter can be one of the following values:
@arg ADC_ExternalTrigConvEdge_None: No external trigger
@arg ADC_ExternalTrigConvEdge_Rising: Rising edge
@arg ADC_ExternalTrigConvEdge_Falling: Falling edge
@arg ADC_ExternalTrigConvEdge_RisingFalling: Rising or falling edge */
uint32_t ADC_ExternalTrigConv; /*!< Specifies the external trigger conversion.
This parameter can be one of the following values:
@arg ADC_ExternalTrigConv_T1_CC1: Timer 1 capture compare 1
@arg ADC_ExternalTrigConv_T1_CC2: Timer 1 capture compare 2
@arg ADC_ExternalTrigConv_T1_CC3: Timer 1 capture compare 3
@arg ADC_ExternalTrigConv_T2_CC1: Timer 2 capture compare 1
@arg ADC_ExternalTrigConv_T2_CC2: Timer 2 capture compare 2
@arg ADC_ExternalTrigConv_T2_CC3: Timer 2 capture compare 3
@arg ADC_ExternalTrigConv_T3_CC1: Timer 3 capture compare 1
@arg ADC_ExternalTrigConv_T3_CC2: Timer 3 capture compare 2
@arg ADC_ExternalTrigConv_T3_CC3: Timer 3 capture compare 3
@arg ADC_ExternalTrigConv_T4_CC1: Timer 4 capture compare 1
@arg ADC_ExternalTrigConv_T4_CC2: Timer 4 capture compare 2
@arg ADC_ExternalTrigConv_T4_CC3: Timer 4 capture compare 3
@arg ADC_ExternalTrigConv_T5_CC1: Timer 5 capture compare 1
@arg ADC_ExternalTrigConv_T5_CC2: Timer 5 capture compare 2
@arg ADC_ExternalTrigConv_T5_CC3: Timer 5 capture compare 3
@arg ADC_ExternalTrigConv_T6_CC1: Timer 6 capture compare 1
@arg ADC_ExternalTrigConv_T6_CC2: Timer 6 capture compare 2
@arg ADC_ExternalTrigConv_T6_CC3: Timer 6 capture compare 3
@arg ADC_ExternalTrigConv_T7_CC1: Timer 7 capture compare 1
@arg ADC_ExternalTrigConv_T7_CC2: Timer 7 capture compare 2
@arg ADC_ExternalTrigConv_T7_CC3: Timer 7 capture compare 3
@arg ADC_ExternalTrigConv_T8_CC1: Timer 8 capture compare 1
@arg ADC_ExternalTrigConv_T8_CC2: Timer 8 capture compare 2
@arg ADC_ExternalTrigConv_T8_CC3: Timer 8 capture compare 3
@arg ADC_ExternalTrigConv_T9_CC1: Timer 9 capture compare 1
@arg ADC_ExternalTrigConv_T9_CC2: Timer 9 capture compare 2
@
# 5.1 引脚复用常见问题及解决方法
在引脚复用配置过程中,可能会遇到一些常见问题,下面列出一些常见问题及其解决方法:
- **问题:引脚复用配置后,引脚无法正常工作。**
- **解决方法:**检查引脚复用配置是否正确,确保引脚已配置为所需的复用功能。此外,检查时钟配置是否正确,引脚所需的时钟是否已使能。
- **问题:引脚复用配置后,引脚出现抖动或噪声。**
- **解决方法:**检查引脚复用配置是否正确,确保引脚未配置为多个复用功能。此外,检查引脚周围是否有其他器件或信号线产生干扰,并采取适当的隔离措施。
- **问题:引脚复用配置后,引脚功耗过高。**
- **解决方法:**检查引脚复用配置是否正确,确保引脚未配置为高频或高电流输出。此外,检查引脚是否连接到外部负载,并优化负载以降低功耗。
- **问题:引脚复用配置后,引脚输入信号不稳定。**
- **解决方法:**检查引脚复用配置是否正确,确保引脚已配置为所需的输入模式。此外,检查输入信号是否稳定,并采取适当的滤波或缓冲措施。
- **问题:引脚复用配置后,引脚输出信号失真。**
- **解决方法:**检查引脚复用配置是否正确,确保引脚已配置为所需的输出模式。此外,检查输出负载是否匹配,并采取适当的匹配措施。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 STM32 单片机引脚为主题,全面解析其功能、应用和配置技巧。从引脚复用配置、输入输出模式、中断配置到模拟功能、时钟配置、复位功能等,深入浅出地讲解引脚的方方面面。此外,还涵盖了引脚保护机制、驱动能力分析、电气特性解读、焊接注意事项、布局优化技巧、故障诊断指南、应用实例解析、高级配置详解、调试技巧、设计最佳实践和性能优化秘籍等内容。通过本专栏,读者可以全面掌握 STM32 单片机引脚的知识,提升单片机开发水平,解锁更多应用可能性。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Geostudio Slope实战案例】:工程问题快速解决指南

# 摘要
本文对Geostudio Slope这一地质工程软件进行了全面的介绍,从基础理论到高级功能,详细阐述了边坡稳定性分析的各个方面。通过理论基础与模型构建章节,本文解释了土力学原理、岩土体分类、以及稳定性分析的理论框架。接着,介绍了边坡稳定性分析方法,包括静态与动态分析的技术细节和安全系数确定。文章还提供了实践案例分析,展示了如何导入地形数据、校准模型参数,并提出解决方案。最后,探讨了软件的未来发展趋势和地质工程领域的研究动向。
【MATLAB信号处理深度解析】:如何优化74汉明码的编码与调试

# 摘要
本论文首先介绍了MATLAB信号处理基础和汉明码的基本概念,然后深入探讨了74汉明码的理论基础,包括其数学原理和编码算法,并讨论了汉明距离、纠错能力和编码过程的代数结构。随后,在MATLAB环境下实现了74汉明码的编码,并通过实例演练对编码效果进行了评
【版图设计中的DRC_LVS技巧】:一步到位确保设计的准确性和一致性

# 摘要
版图设计与验证是集成电路设计的关键环节,其中设计规则检查(DRC)与布局与验证(LVS)是保证版图准确性与一致性的核心技术。本文首先概述了版图设计与验证的基本概念和流程,重点介绍了DRC的原理、规则配置、错误分析与修正方法。接着,文中探讨了LVS的工作原理、比较分析技巧及其与DRC的整合使用。在实践操作方面,本文分析了DRC和LVS在实际项目中的操作案例,并介绍了高级技巧与自动化
打造智能交通灯硬件基石:51单片机外围电路实战搭建

# 摘要
本文全面介绍51单片机基础知识、外围电路设计原理、外围模块实战搭建以及智能交通灯系统的软件编程和系统集成测试。首先,概述51单片机的基础知识,然后详细讨论外围电路设计的关键原理,包括电源电路、时钟电路的构建和I/O端口的扩展。接着,通过实战案例探讨如何搭建传感器接口、显示和通信模块。在此基础上,深入分析智能交通灯系统的软件编程,包括交通灯控制逻辑、外围模块的软件接口和故障检测报警机制。最后,本文着重于系统集成与测试,涵盖
iPlatUI代码优化大全:提升开发效率与性能的7大技巧
# 摘要
本文详细介绍了iPlatUI框架,阐述了其基础性能优化方法。首先概述了iPlatUI框架的基本概念与性能优化的重要性。接着,文章深入讨论了代码重构的多种技巧,包括提高代码可读性的策略、代码重用与组件化,以及清理无用代码的实践。第三章着重于性能监控与分析,提出使用内置工具进行性能检测、性能瓶颈的定位与优化,
【阶跃响应案例研究】:工业控制系统的困境与突破

# 摘要
工业控制系统作为现代制造业的核心,其性能直接影响生产的稳定性和效率。本文首先介绍了工业控制系统的基础知识和阶跃响应的理论基础,阐释了控制系统中开环与闭环响应的特点及阶跃响应的定义和重要性。接着,探讨了工业控制系统在实现阶跃响应时所面临的限制和挑战,如系统动态特性的限制、设备老化和维护问题,以及常见的阶跃响应问题,比如过冲、振荡
UniGUI权限控制与安全机制:确保应用安全的6大关键步骤
# 摘要
本文对UniGUI平台的权限控制与安全机制进行了全面的探讨和分析。文章首先概述了UniGUI权限控制的基本概念、用户身份验证机制和角色与权限映射策略。接着,深入讨论了数据安全、加密技术、安全通信协议的选择与配置以及漏洞管理与缓解措施等安全机制实践。文章还涵盖了访问控制列表(ACL)的高级应用、安全审计和合规性以及定制化安全策略的实施。最后,提供了权限控制与安全机制的最佳实践和案例研究,
笔记本主板电源管理信号解析:专业人士的信号速查手册(专业工具书)

# 摘要
本文对笔记本主板电源管理进行了全面概述,深入探讨了电源管理信号的基础知识、关键信号解析、测试与验证方法以及实际应用案例。文章详细阐述了电源信号的定义、功能、电气特性及在系统中的作用,并对主电源信号、待机电源信号以及电池管理信号进行了深入分析。此外,本文还介绍了电源管理信号测试与验证的流程、工具和故障诊断策略,并通过具体案例展示了故障排除和设
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )