如何选择合适的约束优化算法:全面对比算法优缺点
发布时间: 2024-08-26 20:31:31 阅读量: 45 订阅数: 47 

求解约束优化问题的萤火虫算法及其工程应用
# 1. 约束优化算法概述
约束优化算法是一种用于解决具有约束条件的优化问题的数学方法。它在各个领域都有着广泛的应用,例如工程、经济学和运筹学。约束优化算法通过在满足约束条件的情况下,找到目标函数的最佳值。
约束优化问题通常可以表示为:
```
min/max f(x)
subject to:
g_i(x) <=/>= b_i, i = 1, ..., m
h_j(x) = b_j, j = 1, ..., p
```
其中:
* f(x) 是目标函数
* g_i(x) 和 h_j(x) 是约束函数
* b_i 和 b_j 是约束常数
# 2. 约束优化算法理论基础
约束优化算法理论基础是约束优化算法的基础,它为算法的实现和应用提供了理论支撑。本章节将介绍线性规划、非线性规划和整数规划的理论基础,为后续章节的算法实践和选择指南奠定基础。
### 2.1 线性规划
**2.1.1 线性规划模型**
线性规划(LP)是一种数学优化问题,其目标函数和约束条件都是线性的。线性规划模型可以表示为:
```
min/max f(x) = c^T x
s.t.
Ax ≤ b
x ≥ 0
```
其中:
* f(x) 是目标函数,需要最小化或最大化
* x 是决策变量向量
* c 是目标函数系数向量
* A 是约束矩阵
* b 是约束值向量
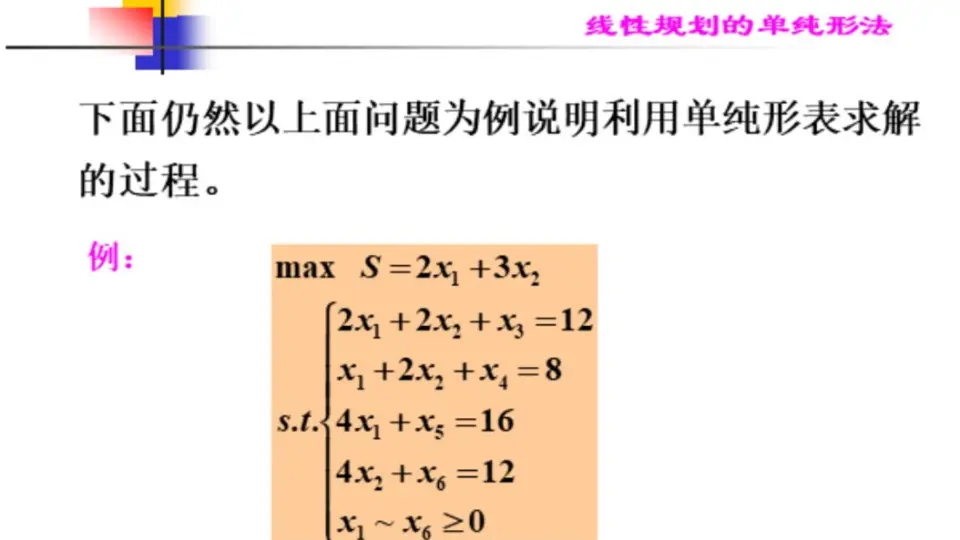
**2.1.2 线性规划算法**
解决线性规划问题的算法有很多,其中最著名的算法是单纯形法。单纯形法是一种迭代算法,通过不断寻找可行解和最优解之间的差异,逐步逼近最优解。
### 2.2 非线性规划
**2.2.1 非线性规划模型**
非线性规划(NLP)是一种数学优化问题,其目标函数或约束条件是非线性的。非线性规划模型可以表示为:
```
min/max f(x)
s.t.
g(x) ≤ 0
h(x) = 0
```
其中:
* f(x) 是目标函数,需要最小化或最大化
* x 是决策变量向量
* g(x) 是不等式约束条件
* h(x) 是等式约束条件
**2.2.2 非线性规划算法**
解决非线性规划问题的算法有很多,其中常用的算法包括:
* 梯度下降法
* 牛顿法
* 共轭梯度法
### 2.3 整数规划
**2.3.1 整数规划模型**
整数规划(IP)是一种数学优化问题,其决策变量必须取整数。整数规划模型可以表示为:
```
min/max f(x)
s.t.
Ax ≤ b
x ∈ Z^n
```
其中:
* f(x) 是目标函数,需要最小化或最大化
* x 是决策变量向量
* A 是约束矩阵
* b 是约束值向量
* Z^n 表示 n 维整数空间
**2.3.2 整数规划算法**
解决整数规划问题的算法有很多,其中常用的算法包括:
* 分支定界法
* 割平面法
# 3.1 线性规划算法实践
**3.1.1 Simplex算法**
Simplex算法是一种求解线性规划问题的经典算法,其基本思想是通过迭代的方式,不断寻找可行解并逐步优化目标函数。
**代码块:**
```python
import numpy as np
from scipy.optimize import linprog
# 定义线性规划模型
c = np.array([1, 2]) # 目标函数系数
A = np.array([[2, 1], [1, 2]]) # 约束矩阵
b = np.array([4, 6]) # 约束值
bounds = [(0, None), (0, None)] # 变量范围
# 求解线性规划问题
res = linprog(c, A_ub=A, b_ub=b, bounds=bounds)
# 输出求解结果
print("最优解:", res.x)
print("最优值:", res.fun)
```
**逻辑分析:**
* `linprog`函数用于求解线性规划问题,其参数包括目标函数系数、约束矩阵、约束值和变量范围。
* `bounds`参数指定变量的范围,`(0, None)`表示变量只能取非负值。
* `res`对象包含求解结果,包括最优解和最优值。
**3.1.2 内点法**
内点法是一种求解线性规划问题的现代算法,其基本思想是通过迭代的方式,保持可行解和最优解之间的接近度,逐步逼近最优解。
**代码块:**
```python
import numpy as np
from cvxopt import matrix, solvers
# 定义线性规划模型
c = np.array([1, 2]) # 目标函数系数
A = np.array([[2, 1], [1, 2]]) # 约束矩阵
b = np.array([4, 6]) # 约束值
# 转换为 CVXOPT 格式
c = matrix(c)
A = matrix(A)
b = matrix(b)
# 求解线性规划问题
solvers.lp(c, A, b)
# 输出求解结果
print("最优解:", sol.get_primal_dual()['x'])
print("最优值:", sol.get_primal_dual()['primal objective'])
```
**逻辑分析:**
* `cvxopt`库提供了求解线性规划问题的函数。
* `matrix`函数将 NumPy 数组转换为 CVXOPT 矩阵。
* `solvers.lp`函数求解线性规划问题,返回一个包含求解结果的对象。
* `get_primal_dual`方法获取求解结果,包括最优解和最优值。
# 4. 约束优化算法选择指南
### 4.1 算法选择原则
在选择约束优化算法时,需要考虑以下原则:
- **问题类型:**首先确定问题的类型,是线性规划、非线性规划还是整数规划。
- **问题规模:**考虑问题的规模,即变量和约束的数量。大规模问题可能需要专门的算法。
- **精度要求:**确定所需的解精度。某些算法可能提供更精确的解,但计算成本更高。
- **计算资源:**考虑可用的计算资源,包括时间和内存。
- **算法特性:**了解不同算法的特性,例如收敛速度、鲁棒性和易用性。
### 4.2 算法优缺点对比
下表总结了不同约束优化算法的优缺点:
| 算法 | 优点 | 缺点 |
|---|---|---|
| Simplex算法 | 适用于大规模线性规划问题 | 可能会出现数值不稳定性 |
| 内点法 | 适用于大规模线性规划问题,数值稳定性好 | 计算成本可能较高 |
| 梯度下降法 | 适用于非线性规划问题,收敛速度快 | 可能陷入局部最优 |
| 牛顿法 | 适用于非线性规划问题,收敛速度快 | 计算成本较高,可能出现数值不稳定性 |
| 分支定界法 | 适用于整数规划问题,保证找到全局最优解 | 计算成本较高 |
| 割平面法 | 适用于整数规划问题,收敛速度快 | 可能陷入局部最优 |
### 4.3 算法适用场景分析
根据不同的问题类型和特性,可以将约束优化算法应用于以下场景:
- **线性规划:**库存管理、生产调度、物流配送。
- **非线性规划:**工程设计、化学反应优化、金融投资优化。
- **整数规划:**人员排班、网络优化、设施选址。
例如,在生产调度优化中,线性规划算法(如 Simplex算法)可以用于分配资源和安排生产顺序,以最大化产量或最小化成本。在金融投资优化中,非线性规划算法(如梯度下降法)可以用于优化投资组合,以最大化收益或最小化风险。
# 5.1 生产调度优化
约束优化算法在生产调度优化中扮演着至关重要的角色,通过优化生产计划,提高产能利用率,降低生产成本。
**5.1.1 线性规划模型**
线性规划模型可以用来优化生产调度问题,其中决策变量表示生产数量,目标函数表示总生产成本,约束条件包括产能限制、需求限制和库存限制。
```python
import pulp
# 创建线性规划模型
model = pulp.LpProblem("生产调度优化", pulp.LpMinimize)
# 决策变量:生产数量
x1 = pulp.LpVariable("产品1数量", 0, None, pulp.LpInteger)
x2 = pulp.LpVariable("产品2数量", 0, None, pulp.LpInteger)
# 目标函数:总生产成本
model += 10 * x1 + 15 * x2
# 约束条件:产能限制
model += x1 + x2 <= 100
# 需求限制
model += x1 >= 50
model += x2 >= 30
# 库存限制
model += x1 <= 200
model += x2 <= 150
# 求解模型
model.solve()
```
**5.1.2 非线性规划模型**
当生产调度问题涉及非线性目标函数或约束条件时,需要采用非线性规划模型。例如,目标函数可以表示为产出与成本的非线性关系。
```python
import scipy.optimize
# 非线性规划模型
def objective_function(x):
return x[0]**2 + x[1]**2
# 约束条件
cons = ({'type': 'ineq', 'fun': lambda x: x[0] + x[1] - 1},
{'type': 'ineq', 'fun': lambda x: -x[0] + x[1] - 1})
# 求解模型
result = scipy.optimize.minimize(objective_function, [0, 0], constraints=cons)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了约束优化算法的方方面面,从数学建模到算法实现,再到应用场景和性能优化。专栏文章涵盖了算法本质的揭秘、应用案例的剖析、算法选择指南、实现步骤解析、性能优化技巧、最新进展探索等内容。此外,专栏还提供了数据库优化和搜索引擎实战指南,包括 MySQL 数据库性能提升、死锁问题解决、索引失效分析、表锁问题解析、备份与恢复、高可用架构设计等。通过深入浅出的讲解和实战案例,本专栏旨在帮助读者掌握约束优化算法的原理、应用和优化技术,提升数据库和搜索引擎的性能和可用性。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
EIA-481-D标准:10大实施指南,确保供应链追踪效率与合规性

# 摘要
EIA-481-D标准是一种广泛应用于多个行业的条码标签和数据交换标准,旨在提升供应链的追踪效率和合规性。本文首先概述了EIA-481-D标准的理论基础,包括其起源、发展和核心要求,特别是关键数据格式与编码解析。其次,详细阐述了该标准在实践中的应用指南,包括标签的应用、数据管理和电子交换的最
R420读写器GPIO安全实操:保障数据传输安全的终极指南
# 摘要
R420读写器是一种广泛应用于数据传输的设备,其安全性和效率很大程度上取决于通用输入输出(GPIO)接口的安全管理。本文首先概述了R420读写器与GPIO的基础知识,接着深入探讨了GPIO在数据传输中的安全机制,并分析了数据传输的安全威胁及其理论基础。第三章提供了R420读写器GPIO的安全实操技巧,包括配置、初始化、数据加密操作及防范攻击方法。进阶应用章节详述了GPIO在高级加密算法中的应用、构建安全数据传输链
硬件仿真中的Microblaze调试:24小时内掌握实战案例分析
# 摘要
本文首先概述了硬件仿真与Microblaze处理器的基础知识,接着详细介绍了Microblaze的调试技术,包括处理器架构理解、仿真环境的搭建、基本调试工具和命令的使用。文章的后半部分着重探讨了Microblaze调试的进阶技巧,如性能分析、中断和异常处理,以及多处理器仿真调试技术。通过实战案例分析,本文具体说明了调试流
美观实用两不误:ECharts地图自定义数值样式完全手册
# 摘要
随着数据可视化在现代信息系统中变得越来越重要,ECharts作为一款流行的JavaScript图表库,其地图功能尤其受到关注。本文全面介绍了ECharts地图的基础知识、自定义样式理论基础、数值样式自定义技巧和进阶应用。文章深入探讨了样式自定义在数据可视化中的作用、性能优化、兼
TRACE32时间戳与性能分析:程序执行时间的精确测量

# 摘要
本文全面探讨了TRACE32在程序性能分析中的应用,强调了时间戳功能在准确记录和优化程序性能方面的重要性。章节首先介绍了TRACE32的基础知识和时间戳功能的生成机制及记录方式,进而详细阐述
信息系统项目风险评估与应对策略:从理论到实操
# 摘要
信息系统项目风险评估是确保项目成功的关键环节,涉及到风险的识别、分类、评估及管理。本文首先介绍了信息系统项目风险评估的基础知识,包括风险的来源分析与指标建立,接着详细阐述了风险的分类方法,探讨了定性和定量风险评估技术,以及风险评估工具的应用实践。此外,文章还讨论了项目风险管理计划的制定,涵盖风险应对策
【MySQL复制与故障转移】:数据库高可用性的关键掌握
# 摘要
本文系统地探讨了MySQL复制技术的基础知识、配置管理、故障转移策略以及高可用性架构设计的理论与实践。首先,介绍了MySQL复制的基本原理,随后详细阐述了如何配置和管理复制环境,包括主从复制的搭建和日志管理。接着,文章深入分析了故障转移的概念、策略及其在实际场景中的应用。此外,本文还讨论了高可
【WZl客户端补丁编辑器:快速入门到专家】:一步步构建并应用补丁

# 摘要
本文系统性地介绍了WZl客户端补丁编辑器的各个方面,从基础操作到高级技巧,再到未来的趋势和扩展。首先概述了补丁编辑器的基本功能与界面布局,随后深入解析了补丁文件结构和编辑流程。文章接着探讨了补丁逻辑与算法的原理和实现,强调了高级逻辑处理和脚本编写的重要性。通过实践操作章节,详细指导了如何构建和优化自定义补丁。在编辑器的高级技巧与优化部分,本文介绍了高级功能的使用以及版本
【数据库故障无处遁形】:工厂管理系统问题诊断到解决全攻略
# 摘要
本文全面探讨了数据库故障的识别、分类、诊断、排查技术,以及维护、优化和恢复策略。首先,对数据库故障进行识别与分类,为接下来的故障诊断提供了理论基础。随后深入讨论了故障诊断技术,包括日志分析技术、性能监控工具的使用和自动化检测,并分析了故障模式与影响分析(FMEA)在实际案例中的应用。在实践排查技术方面,文章详细介绍了事务、锁机制、索引与查询性能及系统资源和硬件故障的排查方法
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )