汇川机器人逆向工程应用:实物转换为机器人的全过程解析
发布时间: 2024-12-03 13:56:23 阅读量: 11 订阅数: 13 

参考资源链接:[汇川四轴机器人编程手册:InoTeachPad示教与编程指南](https://wenku.csdn.net/doc/6475a3eed12cbe7ec319bfdc?spm=1055.2635.3001.10343)
# 1. 逆向工程概述及其在机器人领域的应用
## 1.1 逆向工程的基本概念
逆向工程(Reverse Engineering)是指通过分析一个产品的物理构造、功能和操作模式,来推断和重现其设计蓝图的过程。在机器人领域中,这通常涉及将现有机器人拆解、分析,并利用获得的信息来制造具有类似功能的新机器人。此方法有别于从零开始的设计,它允许工程师在短时间内改进现有设计,甚至复制复杂的系统,从而节省研发时间和成本。
## 1.2 逆向工程的重要性
逆向工程的重要性在于它提供了一种深入理解现有技术的手段,使得工程师可以对现有产品进行创新性改造或提升。在竞争激烈的机器人市场,通过逆向工程可以快速适应技术变革,加速产品迭代,提高产品的竞争力。更重要的是,逆向工程在某些情况下是唯一的手段,比如在原始设计资料丢失或不存在时,机器人产品的逆向工程就成了不可或缺的策略。
## 1.3 逆向工程在机器人领域的应用
在机器人领域,逆向工程可以应用于多种场合。例如,在开发新的机器人产品时,工程师可以通过逆向分析竞争对手的产品来学习其优点和缺点。或者,在需要为老旧机器人进行维护和升级时,逆向工程能够帮助工程师重建机器人关键部件的设计图。逆向工程在机器人领域的应用可以大大减少研究与开发的时间和资源消耗,使企业能够更加专注于创新和优化。
逆向工程的应用不仅限于完整产品的复制,更多地是在于通过对现有产品深入理解,提取其设计核心,然后在此基础上实现创新。随着技术的不断进步,逆向工程在机器人领域扮演的角色将会越来越重要。
# 2. 机器人逆向工程的理论基础
### 2.1 逆向工程的概念与分类
#### 2.1.1 逆向工程定义与目的
逆向工程(Reverse Engineering),简称RE,是通过分析已有产品的组件和材料,以重新构建设计参数、工作原理、工艺流程和功能特性的一系列过程。在机器人领域,逆向工程可以追溯到机器人组件的详细构造,或者通过现有的机械设计来重构其控制逻辑。它通常用于以下目的:
- **理解现有设计**:为了改进或复制一个产品。
- **寻求替代材料或工艺**:可能因为成本、环境影响或知识产权等原因。
- **发现潜在的改进机会**:在现有设计基础上进行创新,以提高效率或性能。
逆向工程不只是一种简单的“复制”技术,而是一个涉及多个步骤、技术和分析的复杂过程。
#### 2.1.2 传统逆向工程与数字逆向工程的区别
传统逆向工程更多依赖于手工测量、解构和分析,比如使用卡尺、游标卡尺等工具来测量物理部件的尺寸,然后根据这些数据绘制草图。而数字逆向工程则依赖于先进的数字技术,如3D扫描和计算机辅助设计(CAD)软件。以下是这两种方法的主要区别:
| 类型 | 方法和工具 | 适用性 | 优点 | 缺点 |
|-------------|----------------------------------------|---------------------------------------------|------------------------------------------|----------------------------------------|
| 传统逆向工程 | 手工测量工具,如卡尺、千分尺;手工绘图软件。 | 适用于简单的、没有复杂几何形状的产品分析。 | 低成本、不需要复杂设备。 | 精度较低,难以处理复杂形状,工作量大,时间消耗长。 |
| 数字逆向工程 | 3D扫描仪,高性能计算机,CAD软件;高级建模技术。 | 适用于复杂的产品和组件,能够处理精细的表面和复杂的几何结构。 | 高精度、速度快、可重复性强。 | 设备和软件成本较高,需要专业人员进行操作和分析。 |
传统逆向工程与数字逆向工程各有其适用场景和优缺点。在机器人领域,由于复杂性和高精度要求,数字逆向工程显得更为重要和常用。
### 2.2 逆向工程在机器人中的关键步骤
#### 2.2.1 数据采集技术
逆向工程的第一步是收集关于机器人的详尽数据,这个过程被称为数据采集。根据机器人的材料和设计复杂性,选择合适的数据采集技术至关重要。
**数据采集方法包括:**
- **3D扫描**:使用激光或结构光等非接触式方法捕捉机器人部件的表面形态。
- **摄影测量法**:通过多角度拍摄照片重建三维模型。
- **坐标测量机(CMM)**:对于要求极高精度的场合,CMM可以提供精确的测量数据。
**3D扫描技术的优势:**
- 高精度:扫描仪能够以微米级精度捕捉细节。
- 非接触式:不破坏原有物体的情况下获取数据。
- 高速度:现代扫描设备可以快速完成大范围扫描任务。
**3D扫描技术的挑战:**
- 光线反射和透明物体的挑战:对于具有反光或透明特性的材料,标准3D扫描技术可能面临困难。
- 大型设备的局限性:对于极大或难以移动的机器人,需要特殊的扫描设备或方法。
#### 2.2.2 数据处理与模型构建
数据采集之后,下一步是将收集到的数据转换为可用的数字模型。这个过程涉及数据处理和三维建模技术。
- **点云处理**:将采集到的数百万点数据(点云)进行筛选、去噪、对齐和融合。
- **表面建模**:从点云数据创建表面,这可以通过手动或半自动方法完成。
- **特征提取**:识别和重建模型的关键特征,如边缘、孔、槽等。
**三维建模软件**,如Geomagic Studio、Rhinoceros和SolidWorks,可用于构建和优化CAD模型。
#### 2.2.3 设计重用与创新
一旦有了精确的数字模型,设计师和工程师可以利用这些信息进行设计重用和创新。
- **设计重用**:通过理解现有设计,将这些知识应用到新的设计项目中,或者通过修改和定制来实现产品升级。
- **创新**:分析现有产品的设计,发现潜在的问题并提出改进的方案,从而开发出全新的产品或组件。
### 2.3 机器人逆向工程中的测量技术
#### 2.3.1 接触式测量方法
接触式测量技术如使用探针的坐标测量机(CMM),虽然速度较慢,但在测量小体积物体、需要高精度的场合中仍然具有其价值。
**CMM的使用流程通常包括:**
1. **设定基准**:确定测量过程的起始点或参考面。
2. **编程**:根据需要测量的特征,预先设定探针的移动路径。
3. **探针接触**:探针接触物体表面,进行逐点测量。
4. **数据记录**:将所有测量点的数据记录下来。
5. **数据分析**:分析数据,生成测量报告和三维模型。
**CMM的主要优点:**
- 高精度:适用于精度要求极高的测量。
- 可重复性好:可以重复进行相同的测量操作,保证数据的一致性。
**CMM的主要缺点:**
- 操作复杂:需要专业人员操作,需要对测量计划进行编程。
- 测量速度慢:对于复杂的机器人组件,测量可能需要较长时间。
#### 2.3.2 非接触式测量技术
现代逆向工程中最常用的非接触式测量方法包括:
- **激光扫描**:激光扫描可以快速获取表面数据,适合复杂和大型物体的三维重建。
- **结构光扫描**:通过投射一系列已知模式的光条纹,并根据它们在物体表面上的变形进行三维重建。
- **光度立体测量**:使用多个相机从不同角度获取物体的多个图像,然后通过几何关系计算出物体的三维形状。
**激光扫描的主要优势:**
- 高速度:激光扫描可以在短时间内获取大量数据点。
- 非接触式:不会对被测物体造成任何损伤。
**激光扫描的挑战:**
- 光线吸收和反射:对于具有镜面或深黑色表面的物体,激光扫描可能无法获取精确数据。
- 环境光干扰:强烈的环境光可能会干扰扫描仪的工作。
#### 2.3.3 测量数据的准确性和完整性评估
在逆向工程中,确保收集到的数据的准确性和完整性至关重要。
**评估准确性通常包括以下步骤:**
- **数据一致性检查**:比较原始扫描数据与重建的三维模型,以确保它们在几何上是吻合的。
- **误差分析**

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
74LS181的电源管理与热设计:确保系统稳定运行的要点
参考资源链接:[4位运算功能验证:74LS181 ALU与逻辑运算实验详解](https://wenku.csdn.net/doc/2dn8i4v6g4?spm=1055.2635.3001.10343)
# 1. 74LS181的基本介绍和应用范围
## 1.1 74LS181概述
74LS181是一款广泛使用的4位算术逻辑单元(ALU),具有16种功能,它能执行多个逻辑和算术操作。LS181内部包含一个4位二进制全
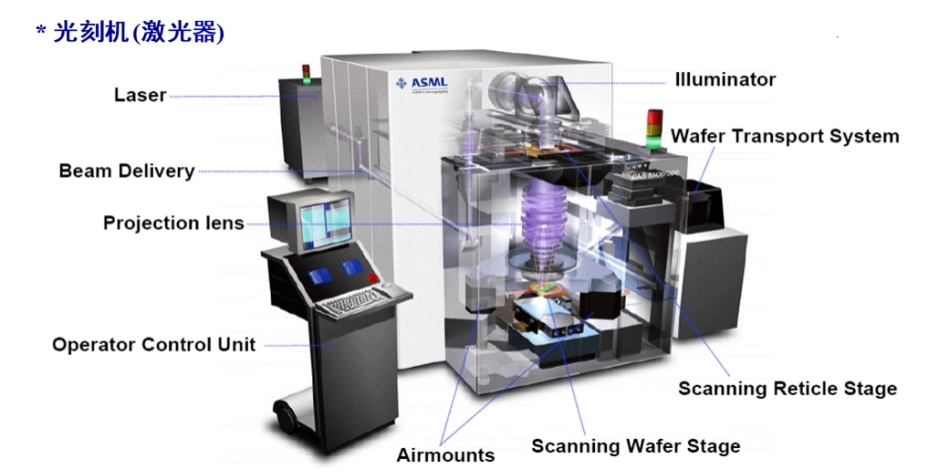
【光刻技术的未来】:从传统到EUV的技术演进与应用
参考资源链接:[Fundamentals of Microelectronics [Behzad Razavi]习题解答](https://wenku.csdn.net/doc/6412b499be7fbd1778d40270?spm=1055.2635.3001.10343)
# 1. 光刻技术概述
## 1.1 光刻技术简介
光刻技术是半导体制造中不可或缺的工艺,它使用光学或电子束来在硅片表面精确地复
QN8035芯片PCB布局技巧:电磁兼容性优化指南(专业性+实用型)
参考资源链接:[QN8035 MSOP收音机芯片硬件设计手册](https://wenku.csdn.net/doc/64783ada543f84448813bcf9?spm=1055.2635.3001.10343)
# 1. QN8035芯片概述与电磁兼容性基础
## 1.1 QN8035芯片概述
QN8035芯片是一款广泛应用于智能设备中的高效能处理器。它拥有强大的数据
【中兴光猫配置文件加密解密工具的故障排除】:解决常见问题的5大策略
参考资源链接:[中兴光猫cfg文件加密解密工具ctce8_cfg_tool使用指南](https://wenku.csdn.net/doc/obihrdayhx?spm=1055.2635.3001.10343)
# 1. 光猫配置文件加密解密概述
随着网络技术的快速发展,光猫设备在数据通信中的角色愈发重要。配置文件的安全性成为网络运营的焦点之一。本章将对光猫配置文件的加密与解密技术进行概述,为后续的故障排查和优化策略打下基础。
## 1.1 加密解密技术的重要性
加密解密技术是确保光猫设备配置文件安全的核心。通过数据加密,可以有效防止敏感信息泄露,保障网络通信的安全性和数据的完整性。本
数字信号处理在电路设计中的应用:深入解析
参考资源链接:[John F.Wakerly《数字设计原理与实践》第四版课后答案汇总](https://wenku.csdn.net/doc/7bj643bmz0?spm=1055.2635.3001.10343)
# 1. 数字信号处理基础
数字信号处理(DSP)是信息科学领域的一个重要分支,它处理的是以数字形式表示的信号。在本章中,我们将简单介绍数字信号处理的基本概念,并为后续章节中深入讨论理论
状态机与控制单元:Logisim实验复杂数据操作管理
参考资源链接:[Logisim实验教程:海明编码与解码技术解析](https://wenku.csdn.net/doc/58sgw98wd0?spm=1055.2635.3001.10343)
# 1. 状态机与控制单元的理论基础
状态机是一种计算模型,它能够通过一系列状态和在这些状态之间的转移来表示对象的行为。它是控制单元设计的核心理论之一,用于处理各种
奇异值分解(SVD):数据分析的高级应用技术揭秘
参考资源链接:[东南大学_孙志忠_《数值分析》全部答案](https://wenku.csdn.net/doc/64853187619bb054bf3c6ce6?spm=1055.2635.3001.10343)
# 1. 奇异值分解的基本概念和数学原理
在本章中,我们将深入探究奇异值分解(SVD)的基础知识,这是理解SVD在数据分析中应用的关
Trace Pro 3.0 优化策略:提高光学系统性能和效率的专家建议
参考资源链接:[TracePro 3.0 中文使用手册:光学分析与光线追迹](https://wenku.csdn.net/doc/1nx4bpuo99?spm=1055.2635.3001.10343)
# 1. Trace Pro 3.0 简介与基础
## 1.1 Trace Pro 3.0 概述
Trace Pro 3.
【HOLLiAS MACS V6.5.2性能优化指南】:架构调整与优化策略深度解析
参考资源链接:[HOLLiAS MACS V6.5.2用户操作手册:2013版权,全面指南](https://wenku.csdn.net/doc/6412b6bfbe7fbd1778d47d3b?spm=1055.2635.3001.10343)
# 1. HOLLiAS MACS V6.5.2概览
## 1.1 HOLLiAS MA
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )