汇川机器人网络通信设置:掌握连通性深度解析与实践技巧
发布时间: 2024-12-03 12:51:42 阅读量: 11 订阅数: 13 
参考资源链接:[汇川四轴机器人编程手册:InoTeachPad示教与编程指南](https://wenku.csdn.net/doc/6475a3eed12cbe7ec319bfdc?spm=1055.2635.3001.10343)
# 1. 汇川机器人网络通信概述
随着工业自动化程度的不断深化,机器人与网络通信的结合变得日益紧密。本章将带你走进汇川机器人的网络通信世界,为你概述其基本框架和重要性。首先,我们将讨论网络通信对机器人技术的作用和它在现代工厂中扮演的角色。随后,本章将简要介绍汇川机器人网络通信的基本功能和应用场景。理解这些基本概念是掌握更深层次网络通信技术的基石。本章旨在为读者提供一个全面的概览,为深入学习后续章节打下坚实的基础。
```mermaid
graph LR
A[汇川机器人网络通信概述] --> B[网络通信对机器人技术的作用]
B --> C[机器人技术与现代工厂]
C --> D[网络通信基本功能与应用场景]
D --> E[下一章:网络通信基础理论]
```
通过上述流程图,我们可以清晰地看到第一章内容的逻辑框架,为接下来的深入探讨铺垫。
# 2. 网络通信基础理论
## 2.1 网络通信基本概念
### 2.1.1 网络协议与机器人通信协议
网络协议是网络通信的规则和标准,是所有网络设备和系统之间交换信息的基础。它们定义了数据的格式、传输、排序以及错误检测和纠正等机制。机器人通信协议特指在自动化控制系统中,机器人与控制器、传感器以及其他设备之间交换信息的规则。例如,工业机器人经常使用Modbus、EtherCAT、Profinet等协议与控制器进行通信。理解这些协议的原理和适用场景对于设计和维护工业网络至关重要。
在机器人网络通信中,协议的选择影响着系统的实时性、可靠性和安全性。例如,使用TCP/IP协议可以提供高可靠性的数据传输,但它通常有较高的延迟,可能不适合对实时性要求极高的应用。而UDP协议虽然传输速度较快,但是不提供数据包的顺序和完整性保证,可能会导致数据丢失。
### 2.1.2 IP地址和子网掩码的作用
IP地址是分配给网络上每个设备的唯一标识符,它允许设备能够在网络中被识别和定位。子网掩码与IP地址配合使用,用于确定IP地址中的哪些部分属于网络地址,哪些属于主机地址。通过子网掩码,网络设备可以区分目的地址是在本地网络内还是在远程网络。
IP地址通常分为两个部分:网络部分和主机部分。子网掩码的位掩码决定了网络部分和主机部分的界限。例如,一个子网掩码为255.255.255.0的网络,表示IP地址的前24位是网络地址,后8位是主机地址。在实际应用中,通过子网划分,可以更有效地管理和分配IP地址,减少广播流量,并增加网络的安全性。
## 2.2 机器人网络通信架构
### 2.2.1 机器人通信网络的层级结构
在机器人通信网络中,层级结构可以被看作是一个分层的通信模型,它将复杂的通信过程分解为更小、更易于管理的块。常见的分层模型包括OSI模型和TCP/IP模型。OSI模型有7层,从物理层到应用层;而TCP/IP模型更倾向于4层,包括链路层、网络层、传输层和应用层。
在机器人领域,通常关注的是应用层、传输层和网络层。应用层协议定义了机器人如何接收指令和发送数据;传输层协议(如TCP或UDP)确保数据的可靠性传输;网络层协议(如IP)定义了数据包的路由和寻址。通过这种方式,网络通信的复杂性被封装在每一层中,使得系统的开发和调试变得更加简单和模块化。
### 2.2.2 通信协议在机器人中的应用实例
考虑一个具体的例子,如工业机器人的手臂控制系统。在该系统中,控制器可能使用Modbus TCP协议与机器人的各个部分进行通信。Modbus TCP是一种基于TCP/IP的应用层协议,它允许控制器通过网络发送和接收数据,控制机器人的运动。
在这种场景下,控制器(客户端)会向机器人(服务器)发送请求,包含控制命令、参数以及必要的数据。机器人通过处理这些请求来执行动作,如移动手臂到特定位置。如果通信中出现错误,例如数据包丢失,TCP协议提供的确认和重传机制确保了控制命令的可靠执行。
## 2.3 网络通信的物理媒介
### 2.3.1 有线和无线网络的对比
网络通信可以通过有线或无线媒介进行。有线网络如以太网,使用电缆直接连接设备,通常提供更高的速度和稳定性,但受限于电缆的长度和布线的灵活性。无线网络如Wi-Fi,则不依赖于物理连接,具有更高的灵活性和可移动性,但可能受到距离、障碍物和电磁干扰的影响。
在机器人领域,有线连接常用于高速数据传输和对实时性要求高的应用,如装配线上的机器人。无线连接则适用于需要较高移动性的场景,比如移动机器人或自主导航车辆。选择哪种连接方式,取决于应用的具体需求、成本预算和环境条件。
### 2.3.2 不同媒介的技术特点和适用场景
有线网络技术的特点是高带宽和低延迟,适合于大容量数据传输和对响应时间敏感的应用。以太网是最常见的有线网络技术,它支持从10Mbps到10Gbps的速率,并且具有较好的抗干扰能力和可靠性。
无线网络技术则提供了更大的灵活性和简便性,但可能面临信号覆盖和带宽的限制。Wi-Fi是应用最为广泛的无线技术,它在2.4GHz或5GHz频段上工作,能够支持高达数Gbps的数据速率。此外,Wi-Fi 6(802.11ax)技术通过优化通信机制,提升了在多设备环境中的性能和效率。
下面是一个表格,对比有线和无线网络的技术特点:
| 特点/技术 | 有线网络 | 无线网络 |
|-------------|-----------|-----------|
| 传输速率 | 高速,可达数Gbps | 中等到高速,受到频率和距离的限制 |
| 带宽 | 高,无带宽共享问题 | 可变,共享带宽可能导致性能下降 |
| 延迟 | 低延迟,非常稳定 | 可能有较高延迟,受环境影响较大 |
| 安全性 | 高,物理连接限制了访问 | 中等,需要额外的安全措施 |
| 安装复杂性 | 中等,需要物理布线 | 低,易于安装和扩展 |
| 成本 | 初始成本较高,长期可能较低 | 初始成本低,长期可能更高 |
选择合适的网络媒介时,需要根据应用的具体需求、成本预算、部署环境和未来扩展性等多方面因素综合考虑。
# 3. 汇川机器人网络通信设置实践
## 3.1 网络通信硬件连接
网络通信硬件连接是确保汇川机器人能够成功实现网络通信的第一步。正确的硬件配置和设置是保障机器人网络通信稳定运行的基础。
### 3.1.1 网络接口与电缆的选择和配置
在选择网络接口和电缆时,需要考虑机器人的具体应用场景以及

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
74LS181的电源管理与热设计:确保系统稳定运行的要点
参考资源链接:[4位运算功能验证:74LS181 ALU与逻辑运算实验详解](https://wenku.csdn.net/doc/2dn8i4v6g4?spm=1055.2635.3001.10343)
# 1. 74LS181的基本介绍和应用范围
## 1.1 74LS181概述
74LS181是一款广泛使用的4位算术逻辑单元(ALU),具有16种功能,它能执行多个逻辑和算术操作。LS181内部包含一个4位二进制全
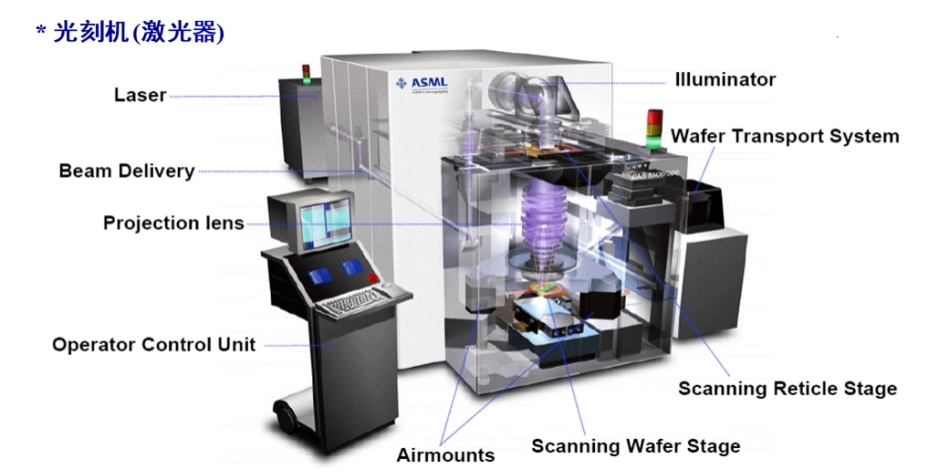
【光刻技术的未来】:从传统到EUV的技术演进与应用
参考资源链接:[Fundamentals of Microelectronics [Behzad Razavi]习题解答](https://wenku.csdn.net/doc/6412b499be7fbd1778d40270?spm=1055.2635.3001.10343)
# 1. 光刻技术概述
## 1.1 光刻技术简介
光刻技术是半导体制造中不可或缺的工艺,它使用光学或电子束来在硅片表面精确地复
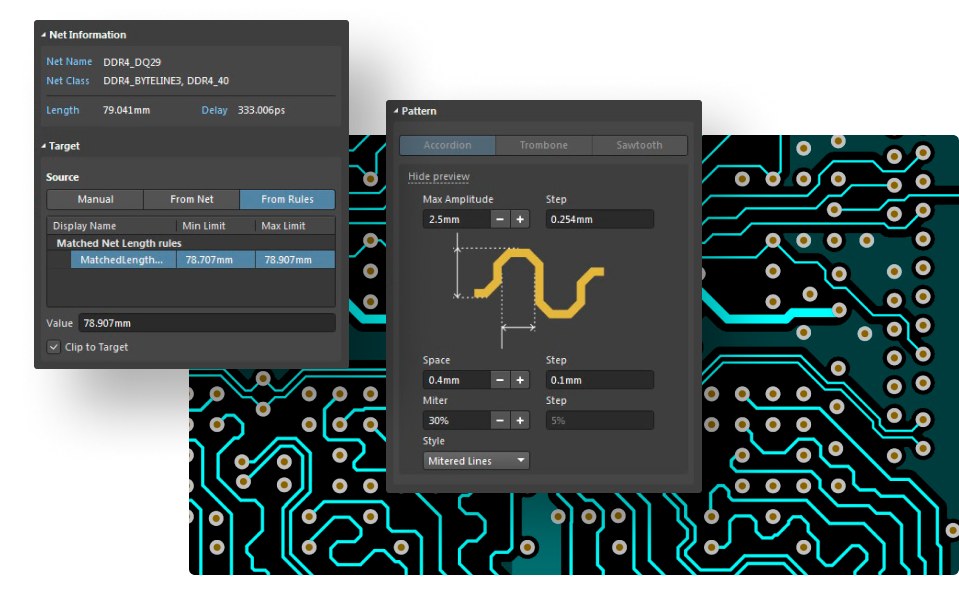
QN8035芯片PCB布局技巧:电磁兼容性优化指南(专业性+实用型)
参考资源链接:[QN8035 MSOP收音机芯片硬件设计手册](https://wenku.csdn.net/doc/64783ada543f84448813bcf9?spm=1055.2635.3001.10343)
# 1. QN8035芯片概述与电磁兼容性基础
## 1.1 QN8035芯片概述
QN8035芯片是一款广泛应用于智能设备中的高效能处理器。它拥有强大的数据
【中兴光猫配置文件加密解密工具的故障排除】:解决常见问题的5大策略
参考资源链接:[中兴光猫cfg文件加密解密工具ctce8_cfg_tool使用指南](https://wenku.csdn.net/doc/obihrdayhx?spm=1055.2635.3001.10343)
# 1. 光猫配置文件加密解密概述
随着网络技术的快速发展,光猫设备在数据通信中的角色愈发重要。配置文件的安全性成为网络运营的焦点之一。本章将对光猫配置文件的加密与解密技术进行概述,为后续的故障排查和优化策略打下基础。
## 1.1 加密解密技术的重要性
加密解密技术是确保光猫设备配置文件安全的核心。通过数据加密,可以有效防止敏感信息泄露,保障网络通信的安全性和数据的完整性。本
数字信号处理在电路设计中的应用:深入解析
参考资源链接:[John F.Wakerly《数字设计原理与实践》第四版课后答案汇总](https://wenku.csdn.net/doc/7bj643bmz0?spm=1055.2635.3001.10343)
# 1. 数字信号处理基础
数字信号处理(DSP)是信息科学领域的一个重要分支,它处理的是以数字形式表示的信号。在本章中,我们将简单介绍数字信号处理的基本概念,并为后续章节中深入讨论理论
状态机与控制单元:Logisim实验复杂数据操作管理
参考资源链接:[Logisim实验教程:海明编码与解码技术解析](https://wenku.csdn.net/doc/58sgw98wd0?spm=1055.2635.3001.10343)
# 1. 状态机与控制单元的理论基础
状态机是一种计算模型,它能够通过一系列状态和在这些状态之间的转移来表示对象的行为。它是控制单元设计的核心理论之一,用于处理各种
奇异值分解(SVD):数据分析的高级应用技术揭秘
参考资源链接:[东南大学_孙志忠_《数值分析》全部答案](https://wenku.csdn.net/doc/64853187619bb054bf3c6ce6?spm=1055.2635.3001.10343)
# 1. 奇异值分解的基本概念和数学原理
在本章中,我们将深入探究奇异值分解(SVD)的基础知识,这是理解SVD在数据分析中应用的关
Trace Pro 3.0 优化策略:提高光学系统性能和效率的专家建议
参考资源链接:[TracePro 3.0 中文使用手册:光学分析与光线追迹](https://wenku.csdn.net/doc/1nx4bpuo99?spm=1055.2635.3001.10343)
# 1. Trace Pro 3.0 简介与基础
## 1.1 Trace Pro 3.0 概述
Trace Pro 3.
【HOLLiAS MACS V6.5.2性能优化指南】:架构调整与优化策略深度解析
参考资源链接:[HOLLiAS MACS V6.5.2用户操作手册:2013版权,全面指南](https://wenku.csdn.net/doc/6412b6bfbe7fbd1778d47d3b?spm=1055.2635.3001.10343)
# 1. HOLLiAS MACS V6.5.2概览
## 1.1 HOLLiAS MA
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )