库卡机器人程序错误处理:调试与优化编程流程
发布时间: 2024-12-15 10:50:11 阅读量: 2 订阅数: 3 

参考资源链接:[库卡机器人kuka故障信息与故障处理.pdf](https://wenku.csdn.net/doc/64619a8c543f844488937510?spm=1055.2635.3001.10343)
# 1. 库卡机器人程序错误处理概述
在现代自动化生产线上,库卡机器人因其精准、高效的工作性能被广泛应用。然而,程序错误处理是确保机器人稳定运行的关键环节,它直接关系到生产效率与产品质量。本章将对库卡机器人程序错误处理进行概述,包括其重要性、基本原理和处理流程。我们会介绍错误处理对于生产优化和故障预防的长远影响,为读者提供一个清晰的理论框架,进而深入探讨后续章节中具体的理论基础、检测诊断技术、调试优化实践以及案例分析和未来技术趋势。通过全面了解库卡机器人程序错误处理,工程师们可以更好地维护和优化生产系统,减少停机时间,提升经济效益。
# 2. 理论基础与错误分类
## 2.1 程序错误的理论基础
### 2.1.1 程序错误的定义和类型
在软件开发中,程序错误指的是软件中的一个状态,它导致软件无法完成其预定的功能或者表现与期望不符。为了更好地理解并应对程序错误,首先需要对其进行分类,不同类型的程序错误需要采取不同的处理策略。
程序错误通常可以分为以下几类:
- **语法错误(Syntax Errors)**:这些错误发生在编译阶段,通常是因为代码的语法不正确。比如,忘记在语句的末尾加分号,或者变量名拼写错误等。
- **运行时错误(Runtime Errors)**:也称为异常错误,它们发生在程序运行时。比如除以零的操作,或者空指针的引用等。
- **逻辑错误(Logical Errors)**:这类错误是最为棘手的。代码语法正确,程序也可以正常运行,但结果不是开发者预期的。可能由于算法逻辑错误或处理数据时的疏忽导致。
- **系统错误(System Errors)**:这些错误通常发生在程序与操作系统的交互过程中,如权限问题,系统资源不足等。
- **机器人硬件故障**:对于特定应用如机器人编程,硬件故障也会导致程序错误。这包括传感器失效、马达故障、电子元件损坏等。
### 2.1.2 错误产生的原因分析
错误产生的原因多种多样,分析这些原因对于预防错误和改进软件质量是至关重要的。一些常见的错误原因包括:
- **人为因素**:如编码时的疏忽,对需求理解不充分,或者设计上的缺陷等。
- **需求变更**:在软件生命周期中,需求的频繁变动可能会引入新的错误。
- **外部因素**:网络不稳定、外部接口的不一致性、第三方服务的不可靠性等。
- **资源限制**:系统资源不足或配置错误可能会导致程序错误。
- **硬件问题**:硬件故障、老化或者不兼容也会导致软件层面的错误。
## 2.2 错误分类与识别
### 2.2.1 语法错误、运行时错误和逻辑错误
识别和分类程序中的错误是错误处理流程的第一步。不同类型的错误需要使用不同的技术进行检测和修正。
- **语法错误**的识别相对简单,通常由编译器自动检测。识别后,程序需要修正代码语法,重新编译直至无误。
- **运行时错误**识别难度较大,通常需要在程序运行时借助调试器或异常处理机制来捕捉和处理。
- **逻辑错误**是最难以识别的,因为它们不会导致程序崩溃,而是会导致程序的输出结果不符合预期。此类错误可能需要详细审查代码逻辑或使用单元测试来发现。
### 2.2.2 系统错误与机器人硬件故障
系统错误和硬件故障往往需要依赖外部工具和日志来识别。
- **系统错误**通常需要参考操作系统提供的错误日志,以及使用系统监控工具来跟踪资源使用情况和系统稳定性。
- 对于**机器人硬件故障**,诊断工具是必不可少的,比如使用示波器来检测电子信号,或者使用专用的硬件诊断软件来检测传感器和马达的工作状态。
下面是一个示例代码块,用于识别和处理运行时错误:
```python
def safe_division(a, b):
try:
result = a / b
except ZeroDivisionError: # 识别除数为零的运行时错误
print("Error: Division by zero is not allowed.")
except TypeError: # 识别类型不匹配的运行时错误
print("Error: Please provide numbers as arguments.")
else:
print("Result:", result)
finally:
print("Operation completed.")
safe_division(10, 0) # 会触发ZeroDivisionError
```
### 2.2.2 错误处理逻辑
在这个代码块中,我们使用了`try`块来包围可能引发异常的代码,`except`块用来捕获具体的异常类型并处理它,`else`块则在没有异常发生时执行,`finally`块无论是否发生异常都会执行。
参数说明:
- `ZeroDivisionError`:Python中除以零引发的错误类型。
- `TypeError`:Python中参数类型不匹配时引发的错误类型。
通过上述结构,我们能够优雅地处理运行时错误,并保证程序的稳定运行,即使在遇到异常情况时也不至于完全崩溃。
```mermaid
graph TD
A[Start] --> B[Try block]
B -->|Error occurs| C[Except block]
B -->|No error| D[Else block]
C --> E[Print Error message]
D --> F[Print Result]
E --> G[Finally block]
F --> G[Print Operation completed]
G --> H[End]
```
这个流程图描述了当运行时错误发生时的处理流程。从`Try block`开始,如果发生错误,程序将跳转到`Except block`。如果没有错误,则执行`Else block`。无论是否出现错误,都会执行`Finally block`,并最后结束程序。
# 3. 错误检测和诊断技术
## 3.1 错误检测方法
### 3.1.1 代码静态分析工具
代码静态分析工具是检查代码中潜在错误的第一道防线。它们在不执行代码的情况下,通过分析代码结构和内容来发现潜在的问题。在库卡机器人编程中,静态分析工具可以检测出不符合规范的编码实践、潜在的内存泄露以及未定义的行为等问题。
工具的使用通常涉及将源代码文件导入到工具中,然后由工具自动执行分析过程。一些静态分析工具也会提供插件,与集成开发环境(IDE)集成,这样开发者可以在编写代码的同时收到即时反馈。
例如,Clang Static Analyzer是一个常用于C/C++代码的静态分析工具。它的使用方法通常包含以下步骤:
1. 下载并安装Clang Static Analyzer。
2. 在命令行中输入 `scan-build` 命令,如 `scan-build make` 来编译你的项目。
3. 分析器将提供一个报告,指出在编译过程中检测到的所有潜在错误。
```sh
scan-build make
```
执行上述命令后,Clang Static Analyzer会生成一个HTML格式的报告,其中详细列出了代码中可能存在的问题,例如:
- 内存分配后未释放。
- 潜在的空指针解引用。
- 可能的整数溢出。
这些报告有助于开发者在代码进入生产环境前消除潜在的缺陷。
### 3.1.2 代码动态监控技术

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《库卡机器人故障信息与处理》专栏为读者提供了全面的库卡机器人故障指南。专栏涵盖了快速识别故障、诊断软件和硬件问题、智能诊断、硬件故障排查、过载保护、零配件更换、程序错误处理、工业物联网整合以及自适应控制等各个方面。通过维修手册、预防策略、终极工具箱、技巧和深入分析,专栏旨在帮助读者有效处理库卡机器人故障,避免意外停机,优化编程流程,并确保机器人的最佳性能。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
离散时间信号与系统实现:分析与操作指南
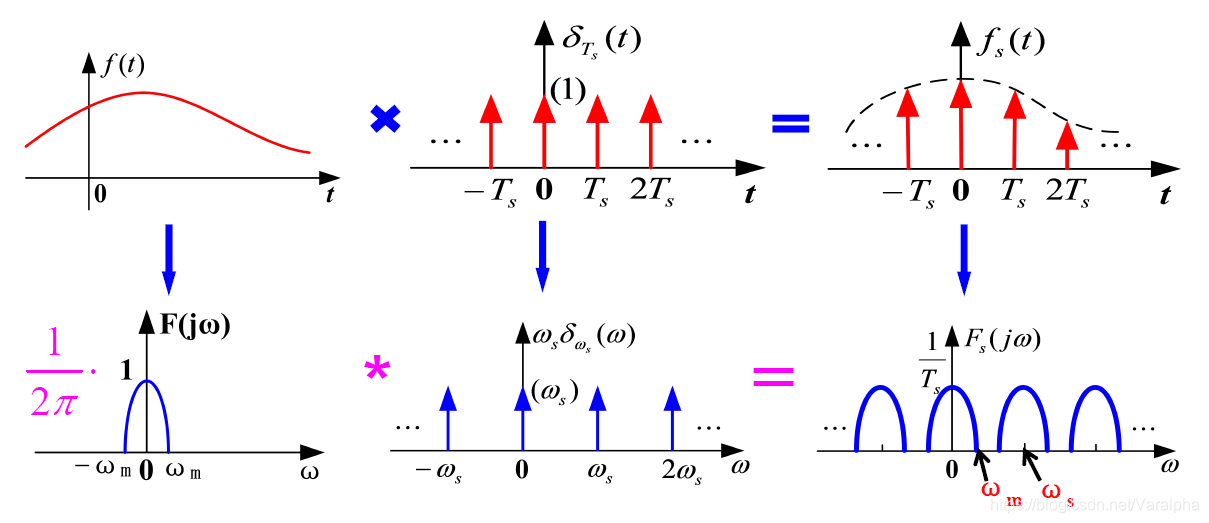
参考资源链接:[《数字信号处理》第三版课后答案解析](https://wenku.csdn.net/doc/12dz9ackpy?spm=1055.2635.3001.1
【送料机构设计原理】:深度解析送料机制构造与工作原理,让你的设计更加精准
.png?mw=1000&hash=95c18cc54587512e123ef22f83defb8a7f7f8789)
参考资源链接:[板料冲制机冲压与送料机构设计解析](https://wenku.csdn.net/doc/5hfp00n04s?spm=1055.2635.3001.10343)
# 1. 送料机构的设计基础与功能概述
## 1
数字通信同步技术:3步走,理论与实践无缝对接
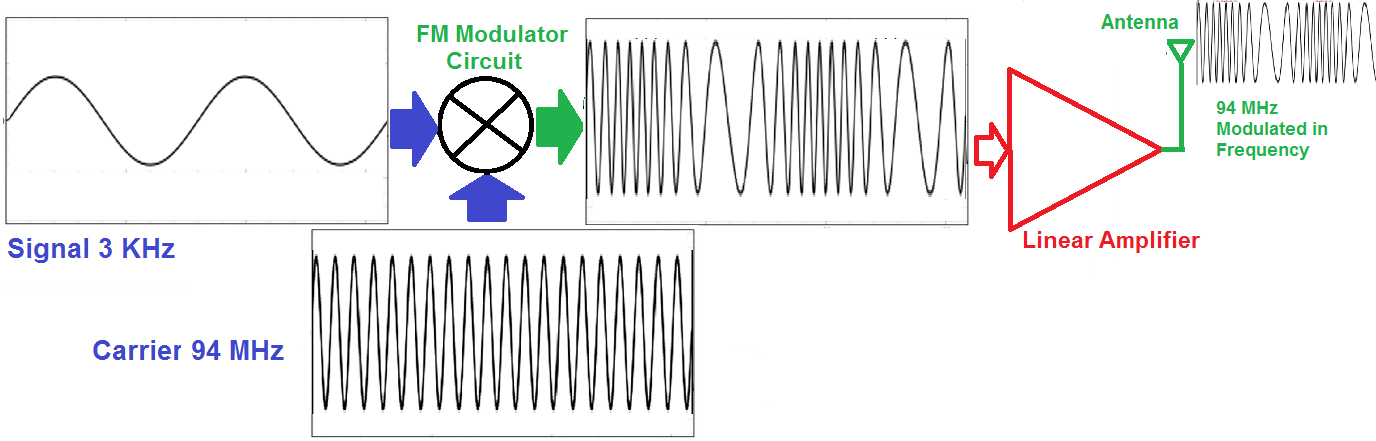
参考资源链接:[9ku文库_数字通信第五版答案_数字通信第五版习题及答案完整版.pdf](https://wenku.csdn.net/doc/4mxpsvzwxh?spm=1055.2635.3001.10343)
# 1. 数字通信同步技术概述
同步技术在数字通信中起着至关重要的作用。它确保数据包在复杂的网
【代码规范检查全攻略】:EETOP.cn SpyGlass LintRules教程

参考资源链接:[SpyGlass Lint规则参考指南:P-2019.06-SP1](https://wenku.csdn.net/doc/5y956iqsgn?spm=1055.2635.3001.10343)
# 1. 代码规范检查概述
## 1.1 代码规范检查的重要性
在软件
【西门子PLC STL编程秘籍】:全面入门到精通指南

参考资源链接:[西门子STL编程手册:语句表指令详解](https://wenku.csdn.net/doc/1dgcsrqbai?spm=1055.2635.3001.10343)
# 1. 西门子PLC STL编程基础
西门子PLC(Programmable Logic Controller)作为自动化领域的领导者,其STL(Statement List)
【海明码全解析】:10个关键技巧让你成为编码专家

参考资源链接:[海明码与码距:概念、例子及纠错能力分析](https://wenku.csdn.net/doc/5qhk39kpxi?spm=1055.2635.3001.10343)
Tetgen高级功能全解析:自定义约束与边界处理技巧

参考资源链接:[tetgen中文指南:四面体网格生成与优化](https://wenku.csdn.net/doc/77v5j4n744?spm=1055.2635.3001.10343)
# 1. Tetgen软件概述与基础功能
## 1.1 Tetgen软件简介
Tetgen是一款开源的三维网格生成器,专门为科学研究与工程应用设计。它能够自动将三维几何模型划分为高质量的四面体网格,对处理复杂的表面和体
【FIBOCOM FM150-AE 系列硬件深度解析】:性能提升必备攻略
参考资源链接:[FIBOCOM FM150-AE系列硬件指南:5G通信模组详解](https://wenku.csdn.net/doc/5a6i74w47q?spm=1055.2635.3001.10343)
# 1. FIBOCOM FM150-AE 系列硬件概览
FIBOCOM FM150-AE 系列硬件作为面向工业级应用设计的通信模块,以高性能、高稳定性和低功耗的特点获得市场的青睐。本章节将对FM150-AE系列进行全方位的硬件概览,包括硬件设计理念、主要功能特点以及应用场景。通过清晰的架构图和功能描述,读者可以迅速把握该系列硬件的核心技术和优势。
## 1.1 硬件设计理念
设计
一文精通8051汇编:指令全览与编程高手秘籍
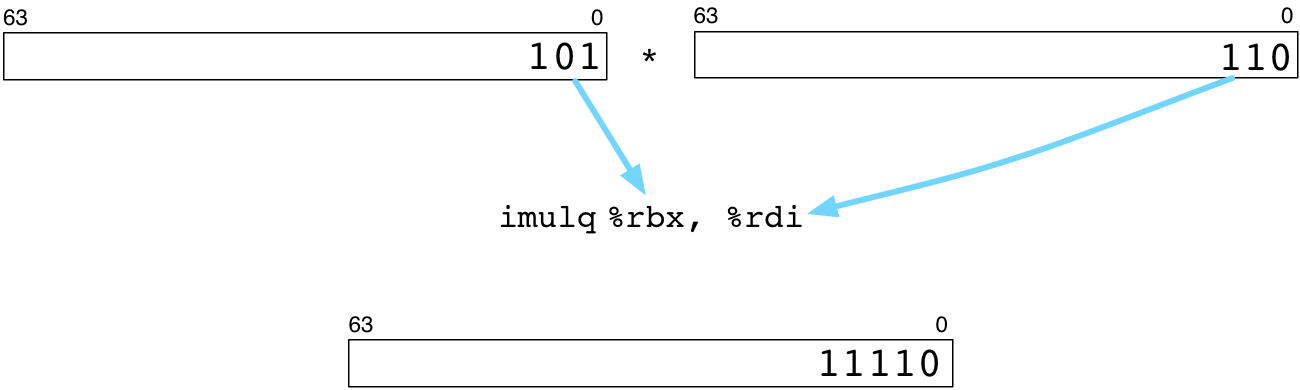
参考资源链接:[8051指令详解:111个分类与详细格式](https://wenku.csdn.net/doc/1oxebjsphj?spm=1055.2635.3001.10343)
# 1. 8051微控制器及汇编语言概述
## 微控制器简介
微控制器(MCU)是一种集成电路芯片,它集成了处理器核心、存储器和各种外设接口,广泛应用于嵌入式系统和自动控制领域。8051微控制器是微控制器领域的一个经典范例,它的简单性和易用性使它成为教学
CEC05 benchmark深度探索:挑战极限,提升算法性能

参考资源链接:[CEC2005真实参数优化测试函数与评估标准](https://wenku.csdn.net/doc/ewbym81paf?spm=1055.2635.3001.10343)
# 1. CEC05基准测试简介
## 什么是CEC05基准测试
CEC05基准测试是针对连续、离散以及多目标优化算法性能评估的年度竞赛。其目
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )