C++类型安全检查:掌握运行时类型识别(RTTI)的技巧
发布时间: 2024-10-01 08:01:49 阅读量: 47 订阅数: 34 

识别c++ RTTI的ida脚本1
# 1. 类型安全与C++ RTTI概述
在C++编程中,类型安全是一个核心概念,它确保程序在编译和运行时对数据类型进行正确的操作。RTTI(Run-Time Type Information,运行时类型信息)是C++提供的一种机制,允许程序在运行时查询对象的类型信息。RTTI是C++对类型安全的支持之一,它特别适用于多态类型系统的场景。
在这一章节中,我们将简要介绍类型安全的重要性以及RTTI在其中扮演的角色。类型安全能够防止许多编程错误,如错误的类型转换和不匹配的函数调用。RTTI的加入,让C++程序员能够在保证类型安全的同时,有效利用多态的特性。RTTI机制的核心是`dynamic_cast`,`typeid`操作符,以及`type_info`类。我们将对这些核心概念进行初步的概述,为后续深入探讨RTTI的内部机制和最佳实践打下基础。
随着C++语言的演进,现代C++在类型安全方面有了更多的增强和替代RTTI的手段。我们将看到如何在不牺牲性能的前提下,通过设计模式和新的库来减少对RTTI的依赖。总之,第一章将为读者提供RTTI的基础知识和在C++中的作用,为后续章节的深入分析奠定理论基础。
# 2. 深入理解RTTI核心机制
## 2.1 RTTI的组成和功能
### 2.1.1 dynamic_cast操作符
在C++中,`dynamic_cast`是一种安全的向下转型操作符,它可以在运行时检查对象的继承结构。`dynamic_cast`主要用于类层次结构中的指针或引用类型转换,并确保转换的安全性。如果转换失败,它返回`nullptr`(针对指针)或抛出`std::bad_cast`异常(针对引用)。这种机制使得开发者可以安全地处理多态类型,而不必担心类型转换出错。
以下是一个使用`dynamic_cast`的示例代码:
```cpp
class Base {
public:
virtual ~Base() {}
};
class Derived : public Base {};
void processObject(Base* b) {
Derived* d = dynamic_cast<Derived*>(b);
if (d != nullptr) {
// 成功转换,可以安全使用 d 指针
} else {
// 转换失败,应进行错误处理
}
}
```
在上述代码中,`Derived`继承自`Base`。`processObject`函数接收一个`Base`类的指针,并尝试将其安全地转换为`Derived`类型的指针。由于使用了`dynamic_cast`,如果`b`实际指向一个`Derived`对象,则转换成功,否则`d`将会是`nullptr`。
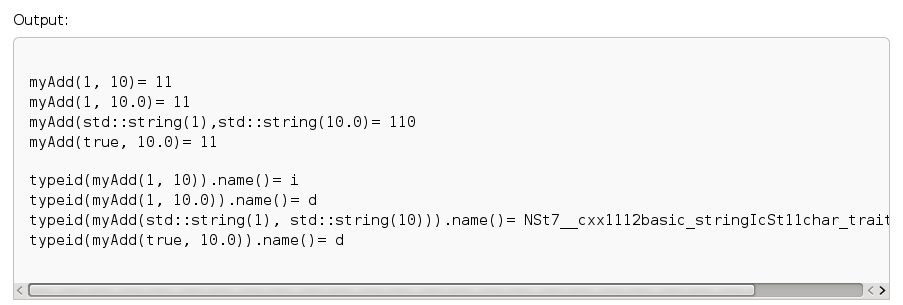
### 2.1.2 type_info类和name()方法
`type_info`是C++标准库中的一个类,它用于表示类型的属性。`type_info`类的对象可以通过`typeid`操作符获取,它通常包含两个主要成员函数:`name()`和`hash_code()`。`name()`方法返回一个表示类型名称的字符串,而`hash_code()`返回类型名称的哈希值。
示例代码:
```cpp
#include <typeinfo>
#include <iostream>
class MyClass {};
int main() {
MyClass myObj;
const std::type_info& type = typeid(myObj);
std::cout << "The type of myObj is " << type.name() << std::endl;
return 0;
}
```
在这段代码中,创建了一个`MyClass`类型的对象,并通过`typeid(myObj)`获取了这个对象的`type_info`。然后我们打印出了类型名称。需要注意的是,`name()`返回的字符串取决于编译器的实现,可能并不是完全规范的类型名称。
### 2.1.3 typeid操作符
`typeid`操作符用于获取表达式的类型信息,同样返回一个`type_info`对象。它可以用于任何类型(包括内置类型、自定义类型、指针类型等),但对类类型而言,只有当至少有一个静态类型信息(通过`virtual`成员函数或虚基类)可用时,才能正确地识别多态类型。
示例代码:
```cpp
#include <typeinfo>
class Base {};
class Derived : public Base {};
Base* b = new Derived();
std::cout << "Type of b is " << typeid(*b).name() << std::endl;
```
在这个例子中,尽管`b`是一个基类指针,`typeid(*b)`使用了`*`运算符进行解引用,因此`typeid`能够知道`b`实际上指向一个`Derived`类型的对象,然后输出正确的类型名称。
### 2.1.1, 2.1.2 和 2.1.3的小结
在本小节中,我们介绍了RTTI的三大组件:`dynamic_cast`、`type_info`类及其`name()`方法和`typeid`操作符。通过展示每个组件的具体用法,并通过代码示例解释了它们在运行时类型识别和转换中的作用,加深了读者对RTTI基础功能的理解。在接下来的章节中,我们将深入探讨RTTI的工作原理,包括虚函数表的作用,类型转换的内部机制,以及RTTI实现的细节。
# 3. RTTI在实际编程中的应用
## 3.1 使用RTTI进行类型检查
### 3.1.1 安全地向下转型
在C++中,向下转型(downcasting)是指将基类指针或引用来转换为派生类的指针或引用。这种操作如果不加控制,很容易引发运行时错误,如经典的"object slicing"问题。RTTI提供了一种安全的向下转型机制,借助`dynamic_cast`操作符,可以在编译时检查转换的安全性,如果转换不可能,则返回一个空指针。
```cpp
#include <iostream>
class Base {
public:
virtual ~Base() {} // 确保多态性
};
class Derived : public Base {
};
int main() {
Base* b = new Derived();
Derived* d = dynamic_cast<Derived*>(b);
if (d) {
std::cout << "Dynamic cast successful!" << std::endl;
} else {
std::cout << "Dynamic cast failed." << std::endl;
}
delete b;
return 0;
}
```
在上述代码中,我们定义了一个基类`Base`和一个派生类`Derived`。通过`dynamic_cast`尝试将`Base`类指针转换为`Derived`类指针。如果`b`实际指向一个`Derived`对象,则转换成功;否则,转换失败,`d`将为`nullptr`。
### 3.1.2 动态类型识别的应用实例
RTTI除了用于安全的向下转型,还可以用在需要识别对象实际类型的情况下。这在处理多态对象集合,或需要根据对象的具体类型执行不同操作时特别有用。
```cpp
#include <iostream>
#include <vector>
#include <typeinfo>
class Shape {
public:
virtual void draw() = 0;
virtual ~Shape() {}
};
class Circle : public Shape {
public:
void draw() override {
std::cout << "Circle::draw" << std::endl;
}
};
class Rectangle : public Shape {
public:
void draw() override {
std::cout << "Rectangle::draw" << std::endl;
}
};
int main() {
std::vector<Shape*> shapes;
shapes.push_back(new Circle());
shapes.push_back(new Rectangle());
for (Shape* s : shapes) {
s->draw();
std::cout << "Type of s: " << typeid(*s).name() << std::endl;
}
for (Shape* s : shapes) {
delete s;
}
return 0;
}
```
在这个例子中,我们创建了一个基类`Shape`,以及两个派生类`Circle`和`Rectangle`。每个派生类都重写了`draw()`方法。通过`typeid(*s)`获取对象的实际类型信息,然后打印出来。这样的识别对于在运行时根据不同类型执行特定操作非常有用。
### 3.2 RTTI与多态性
#### 3.2.1 结合虚函数和RTTI
多态性是面向对象编程的一个重要特性,它允许通过基类接口操作不同的派生类对象。RTTI可以用来增强这种机制,特别是在需要进行类型检查的情况下。结合虚函数和RTTI,可以在运行时确定对象的实际类型,并执行特定类型的行为。
```cpp
#include <iostream>
#include <typeinfo>
class Animal {
public:
virtual void makeSound() = 0;
virtual ~Animal() {}
};
class Dog : public Animal {
public:
void makeSound() override {
std::cout << "Woof!" << std::endl;
}
};
class Cat : public
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 C++ 类的各个方面,从其内存布局和性能优化到高级模板技巧、异常安全性、资源管理和智能指针的使用。它还提供了对静态成员、多重继承、类型安全检查、多态性、默认成员函数和模板编程的深入理解。通过提供一系列实用技巧和策略,该专栏旨在帮助 C++ 开发人员掌握对象模型,提高代码健壮性和性能,并充分利用 C++ 语言的强大功能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PX4飞行控制深度解析】:ECL EKF2算法全攻略及故障诊断
# 摘要
本文对PX4飞行控制系统中的ECL EKF2算法进行了全面的探讨。首先,介绍了EKF2算法的基本原理和数学模型,包括核心滤波器的架构和工作流程。接着,讨论了EKF2在传感器融合技术中的应用,以及在飞行不同阶段对算法配置与调试的重要性。文章还分析了EKF2算法在实际应用中可能遇到的故障诊断问题,并提供了相应的优化策略和性能提升方法。最后,探讨了EKF2算法与人工智能结合的前景、在新平台上的适应性优化,以及社区和开
【电子元件检验工具:精准度与可靠性的保证】:行业专家亲授实用技巧
# 摘要
电子元件的检验在现代电子制造过程中扮演着至关重要的角色,确保了产品质量与性能的可靠性。本文系统地探讨了电子元件检验工具的重要性、基础理论、实践应用、精准度提升以及维护管理,并展望了未来技术的发展趋势。文章详细分析了电子元件检验的基本原则、参数性能指标、检验流程与标准,并提供了手动与自动化检测工具的实践操作指导。同时,重点阐述了校准、精确度提
Next.js状态管理:Redux到React Query的升级之路

# 摘要
本文全面探讨了Next.js应用中状态管理的不同方法,重点比较了Redux和React Query这两种技术的实践应用、迁移策略以及对项目性能的影响。通过详细分析Next.js状态管理的理论基础、实践案例,以及从Redux向React Query迁移的过程,本文为开发者提供了一套详细的升级和优化指南。同时,文章还预测了状态管理技术的未来趋势,并提出了最
【802.3BS-2017物理层详解】:如何应对高速以太网的新要求

# 摘要
随着互联网技术的快速发展,高速以太网成为现代网络通信的重要基础。本文对IEEE 802.3BS-2017标准进行了全面的概述,探讨了高速以太网物理层的理论基础、技术要求、硬件实现以及测试与验证。通过对物理层关键技术的解析,包括信号编码技术、传输介质、通道模型等,本文进一步分析了新标准下高速以太网的速率和距离要求,信号完整性与链路稳定性,并讨论了功耗和环境适应性问题。文章还介绍了802.3
【CD4046锁相环实战指南】:90度移相电路构建的最佳实践(快速入门)

# 摘要
本文对CD4046锁相环的基础原理、关键参数设计、仿真分析、实物搭建调试以及90度移相电路的应用实例进行了系统研究。首先介绍了锁相环的基本原理,随后详细探讨了影响其性能的关键参数和设计要点,包括相位噪声、锁定范围及VCO特性。此外,文章还涉及了如何利用仿真软件进行锁相环和90度移相电路的测试与分析。第四章阐述了CD
数据表分析入门:以YC1026为例,学习实用的分析方法
# 摘要
随着数据的日益增长,数据分析变得至关重要。本文首先强调数据表分析的重要性及其广泛应用,然后介绍了数据表的基础知识和YC1026数据集的特性。接下来,文章深入探讨数据清洗与预处理的技巧,包括处理缺失值和异常值,以及数据标准化和归一化的方法。第四章讨论了数据探索性分析方法,如描述性统计分析、数据分布可视化和相关性分析。第五章介绍了高级数据表分析技术,包括高级SQL查询
Linux进程管理精讲:实战解读100道笔试题,提升作业控制能力
# 摘要
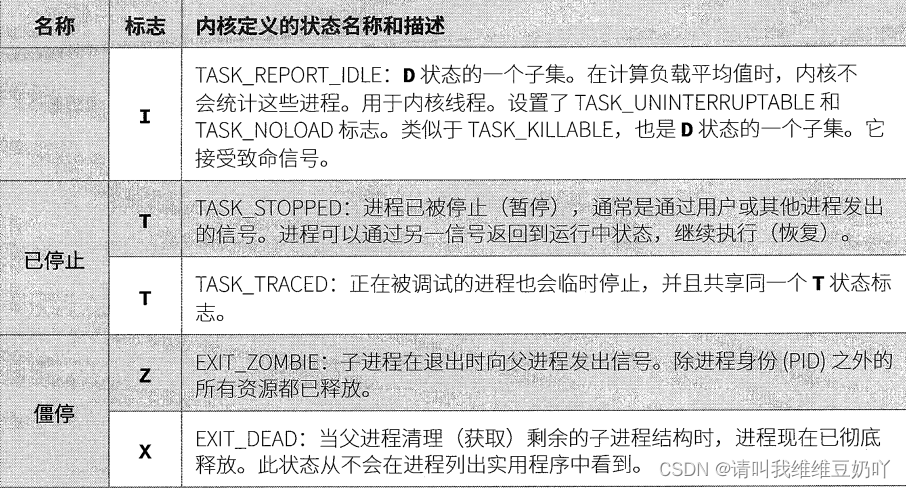
Linux进程管理是操作系统核心功能之一,对于系统性能和稳定性至关重要。本文全面概述了Linux进程管理的基本概念、生命周期、状态管理、优先级调整、调度策略、进程通信与同步机制以及资源监控与管理。通过深入探讨进程创建、终止、控制和优先级分配,本文揭示了进程管理在Linux系统中的核心作用。同时,文章也强调了系统资源监控和限制的工具与技巧,以及进程间通信与同步的实现,为系统管理员和开
STM32F767IGT6外设扩展指南:硬件技巧助你增添新功能
# 摘要
本文全面介绍了STM32F767IGT6微控制器的硬件特点、外设扩展基础、电路设计技巧、软件驱动编程以及高级应用与性
【精密定位解决方案】:日鼎伺服驱动器DHE应用案例与技术要点

# 摘要
本文详细介绍了精密定位技术的概览,并深入探讨了日鼎伺服驱动器DHE的基本概念、技术参数、应用案例以及技术要点。首先,对精密定位技术进行了综述,随后详细解析了日鼎伺服驱动器DHE的工作原理、技术参数以及
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )