




OpenCV边缘检测实战指南:掌握图像边缘检测的技巧,提升图像处理效率


Opencv C++图像处理全面指南:从环境搭建到实战案例解析
1. OpenCV边缘检测概述
OpenCV边缘检测是一种计算机视觉技术,用于从图像中提取物体的轮廓和边界。边缘代表图像中亮度或颜色的突然变化,可以提供有关物体形状和结构的重要信息。
OpenCV提供了多种边缘检测算法,每种算法都有其独特的优点和缺点。最常用的算法包括Canny、Sobel和Laplacian边缘检测。这些算法通过应用数学运算符(如梯度和拉普拉斯算子)来检测图像中的边缘。通过调整算法参数,可以控制边缘检测的灵敏度和准确性。
2. OpenCV边缘检测算法**
2.1 Canny边缘检测
2.1.1 原理和算法流程
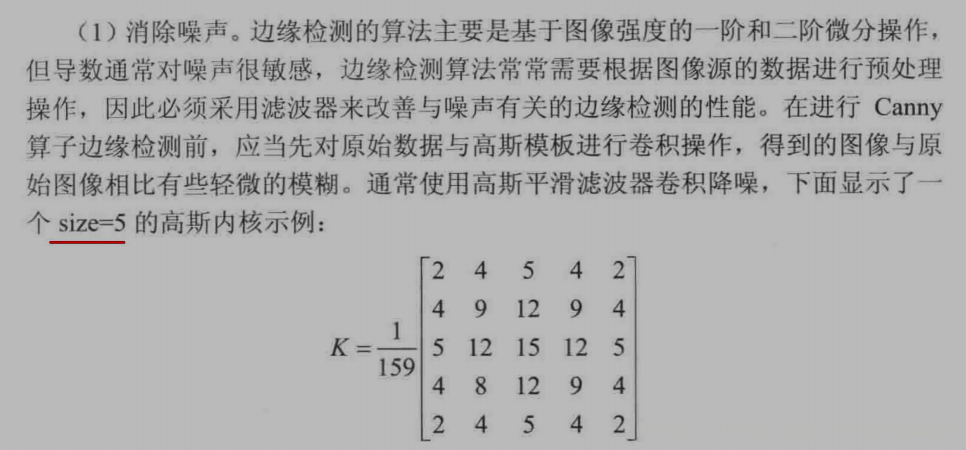
Canny边缘检测是一种多阶段算法,旨在检测图像中的真实边缘,同时抑制噪声。其主要步骤如下:
- **图像平滑:**使用高斯滤波器平滑图像,以去除噪声。
- **梯度计算:**使用Sobel算子计算图像的水平和垂直梯度。
- **非极大值抑制:**在每个像素点,选择梯度幅度最大的方向,抑制其他方向的梯度。
- **阈值化:**使用两个阈值(高阈值和低阈值)对梯度幅度进行阈值化,以分离强边缘和弱边缘。
- **边缘连接:**将弱边缘与强边缘连接,形成连续的边缘。
2.1.2 参数选择和优化
Canny边缘检测算法的性能受以下参数影响:
- **高阈值:**用于分离强边缘。值越大,检测到的边缘越少。
- **低阈值:**用于分离弱边缘。值越大,检测到的边缘越多。
- **高斯滤波器内核大小:**用于平滑图像。值越大,噪声抑制效果越好,但边缘定位精度会降低。
2.2 Sobel边缘检测
2.2.1 原理和算法流程
Sobel边缘检测是一种一阶边缘检测算法,通过计算图像像素梯度来检测边缘。其主要步骤如下:
- **图像平滑:**使用高斯滤波器平滑图像,以去除噪声。
- **梯度计算:**使用Sobel算子计算图像的水平和垂直梯度。
- **梯度幅度计算:**计算水平和垂直梯度的平方和的平方根,得到梯度幅度。
- **阈值化:**使用阈值对梯度幅度进行阈值化,以分离边缘像素。
2.2.2 梯度计算和非极大值抑制
Sobel算子是一个3x3卷积核,用于计算图像梯度。水平Sobel算子为:
- [-1, 0, 1]
- [-2, 0, 2]
- [-1, 0, 1]
垂直Sobel算子为:
- [-1, -2, -1]
- [0, 0, 0]
- [1, 2, 1]
通过将Sobel算子与图像进行卷积,可以得到水平和垂直梯度。非极大值抑制步骤与Canny边缘检测类似。
2.3 Laplacian边缘检测
2.3.1 原理和算法流程
Laplacian边缘检测是一种二阶边缘检测算法,通过计算图像像素拉普拉斯算子来检测边缘。其主要步骤如下:
- **图像平滑:**使用高斯滤波器平滑图像,以去除噪声。
- **拉普拉斯算子计算:**使用拉普拉斯算子对图像进行卷积,得到拉普拉斯图像。
- **零交叉点检测:**找到拉普拉斯图像中拉普拉斯算子为零的点,这些点对应于边缘。
- **边缘连接:**将零交叉点连接成连续的边缘。
2.3.2 零交叉点检测和边缘连接
拉普拉斯算子是一个3x3卷积核,用于计算图像拉普拉斯算子。拉普拉斯算子为:
- [0, 1, 0]
- [1, -4, 1]
- [0, 1, 0]
通过将拉普拉斯算子与图像进行卷积,可以得到拉普拉斯图像。零交叉点检测步骤是找到拉普拉斯图像中拉普拉斯算子为零的点。边缘连接步骤与Canny边缘检测类似。
3. OpenCV边缘检测实践
3.1 图像预处理和增强
图像预处理和增强是边缘检测的关键步骤,可以有效提高边缘检测的精度和鲁棒性。
3.1.1 图像灰度化和噪声去除
对于彩色图像,需要先将其转换为灰度图像,以去除颜色信息对边缘检测的影响。常用的灰度化方法包括:
cv2.cvtColor(image, cv2.COLOR_BGR2GRAY):将BGR图像转换为灰度图像。cv2.cvtColor(image, cv2.COLOR_RGB2GRAY):将RGB图像转换为灰度图像。
噪声会干扰边缘检测,因此需要对图像进行噪声去除。常用的噪声去除方法包括:
- 高斯滤波:
cv2.GaussianBlur(image, (5, 5), 0),其中(5, 5)为滤波核大小,0为标准差。 - 中值滤波:
cv2.medianBlur(image, 5),其中5为滤波核大小。
3.1.2 图像平滑和锐化
图像平滑可以去除图像中的细小噪声和纹理,使边缘更加明显。常用的平滑方法包括:
- 均值滤波:
cv2.blur(image, (5, 5)),其中(5, 5)为滤波核大小。 - 高斯滤波:
cv2.GaussianBlur(image, (5, 5), 0),其中(5, 5)为滤波核大小,0为标准差。
图像锐化可以增强边缘,使边缘更加清晰。常用的锐化方法包括:
- 拉普拉斯算子:
cv2.Laplacian(image, cv2.CV_64F),其中cv2.CV_64F指定输出图像的类型。 - Sobel算子:
cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5),其中1和0分别指定x和y方向的导数阶数,ksize指定滤波核大小。
3.2 边缘检测算法应用
3.2.1 Canny边缘检测实践
Canny边缘检测算法是一种多阶段边缘检测算法,包括噪声去除、梯度计算、非极大值抑制和滞后阈值化。

3.2.2 Sobel边缘检测实践
Sobel边缘检测算法是一种一阶导数边缘检测算法,通过计算图像中像素的梯度来检测边缘。
3.2.3 Laplacian边缘检测实践
Laplacian边缘检测算法是一种二阶导数边缘检测算法,通过计算图像中像素的拉普拉斯算子来检测边缘。
3.3 边缘后处理和优化
3.3.1 边缘细化和连接
边缘细化可以去除边缘中的细小噪声和毛刺,使边缘更加清晰。常用的细化方法包括:
- 形态学操作:
cv2.erode(edges, kernel),其中kernel为形态学操作的内核。 - 骨架化:
cv2.thinning(edges),其中edges为边缘图像。
边缘连接可以将断开的边缘连接起来,使边缘更加完整。常用的连接方法包括:
- 洪水填充:
cv2.floodFill(edges, mask, seedPoint),其中mask为掩码图像,seedPoint为种子点。 - 连通域分析:
cv2.connectedComponents(edges),其中edges为边缘图像。
3.3.2 边缘滤波和降噪
边缘滤波可以去除边缘中的噪声和伪影,使边缘更加平滑。常用的滤波方法包括:
- 高斯滤波:
cv2.GaussianBlur(edges, (5, 5), 0),其中(5, 5)为滤波核大小,0为标准差。 - 中值滤波:
cv2.medianBlur(edges, 5),其中5为滤波核大小。
4. OpenCV边缘检测高级应用
4.1 边缘检测在图像分割中的应用
4.1.1 图像分割概述
图像分割是将图像分解为具有不同特征(例如颜色、纹理、边缘)的子区域的过程。它在计算机视觉中至关重要,用于对象识别、场景理解和图像分析。
4.1.2 基于边缘检测的图像分割算法
边缘检测算法可以用于图像分割,因为边缘通常表示图像中不同区域之间的边界。以下是一些基于边缘检测的图像分割算法:
- **区域生长算法:**从一个种子点开始,将相邻像素添加到区域,如果它们与种子点具有相似的边缘强度。
- **分水岭算法:**将图像视为地形,边缘作为分水岭,将图像分割成不同的区域。
- **基于图的分割:**将图像表示为一个图,其中像素是节点,边缘是边。分割算法将图分割成不同的子图,代表不同的图像区域。
4.2 边缘检测在目标检测中的应用
4.2.1 目标检测概述
目标检测是在图像中定位和识别特定目标的过程。它在计算机视觉中广泛用于对象识别、人脸检测和车辆检测。
4.2.2 基于边缘检测的目标检测算法
边缘检测算法可以用于目标检测,因为边缘通常表示目标的轮廓。以下是一些基于边缘检测的目标检测算法:
- **轮廓检测:**检测图像中的轮廓,并使用它们来识别目标。
- **边缘匹配:**将图像边缘与目标模型中的边缘进行匹配,以定位目标。
- **霍夫变换:**检测图像中直线或圆等几何形状,并使用它们来识别目标。
4.3 边缘检测在图像配准中的应用
4.3.1 图像配准概述
图像配准是将两幅或多幅图像对齐的过程,以便它们具有相同的空间参考系。它在医学成像、遥感和计算机视觉中至关重要。
4.3.2 基于边缘检测的图像配准算法
边缘检测算法可以用于图像配准,因为边缘通常表示图像中显著的特征。以下是一些基于边缘检测的图像配准算法:
- **基于特征的配准:**检测两幅图像中的边缘,并使用它们来匹配特征点,从而实现图像配准。
- **基于梯度的配准:**计算两幅图像的梯度,并使用它们来计算图像之间的相似性度量,从而实现图像配准。
- **基于相位相关性的配准:**计算两幅图像的相位相关性,并使用它来估计图像之间的位移,从而实现图像配准。
5. OpenCV边缘检测最佳实践
5.1 算法选择和参数优化
5.1.1 不同算法的优缺点
| 算法 | 优点 | 缺点 |
|---|---|---|
| Canny | 高精度、低噪声 | 计算量大 |
| Sobel | 计算量小、速度快 | 对噪声敏感 |
| Laplacian | 对噪声鲁棒性强 | 边缘定位不准确 |
5.1.2 参数选择和调整技巧
- Canny边缘检测:
- **阈值1 (minVal):**设置较低阈值以检测更多边缘,但会引入更多噪声。
- **阈值2 (maxVal):**设置较高阈值以抑制噪声,但可能会丢失一些边缘。
- Sobel边缘检测:
- **梯度阈值:**设置较低阈值以检测更多边缘,但会引入更多噪声。
- Laplacian边缘检测:
- **零交叉点阈值:**设置较低阈值以检测更多边缘,但可能会产生断断续续的边缘。
5.2 性能优化和并行处理
5.2.1 优化算法实现
- 使用优化后的库(如OpenCV)
- 使用高效的数据结构和算法
- 避免不必要的内存分配和拷贝
5.2.2 并行处理和加速技术
- 使用多核处理器或GPU进行并行计算
- 使用OpenMP或CUDA等并行编程框架
- 优化代码以减少同步开销
5.3 常见问题和解决方案
5.3.1 边缘检测失败或不准确的原因
- **噪声:**图像噪声会干扰边缘检测。
- **模糊:**图像模糊会使边缘难以检测。
- **对比度低:**对比度低的图像会使边缘难以区分。
5.3.2 解决边缘检测常见问题的技巧
- **图像预处理:**应用滤波器以去除噪声和锐化图像。
- **参数调整:**调整边缘检测算法的参数以适应特定图像。
- **后处理:**应用边缘细化、连接和滤波技术以增强边缘。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐

专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Arcmap空间参考系统】:掌握SHP文件坐标转换与地理纠正的完整策略
【VCS高可用案例篇】:深入剖析VCS高可用案例,提炼核心实施要点
【精准测试】:确保分层数据流图准确性的完整测试方法
Cygwin系统监控指南:性能监控与资源管理的7大要点
【T-Box能源管理】:智能化节电解决方案详解
【内存分配调试术】:使用malloc钩子追踪与解决内存问题
Fluentd与日志驱动开发的协同效应:提升开发效率与系统监控的魔法配方
戴尔笔记本BIOS语言设置:多语言界面和文档支持全面了解
ISO_IEC 27000-2018标准实施准备:风险评估与策略规划的综合指南


专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )





















