YOLO算法在目标检测中的应用场景解析:从人脸识别到无人驾驶,全面掌握其应用潜力
发布时间: 2024-08-14 18:19:40 阅读量: 41 订阅数: 37 

# 1. YOLO算法概述**
YOLO(You Only Look Once)算法是一种实时目标检测算法,因其速度快、准确度高而受到广泛关注。与传统的目标检测算法不同,YOLO算法采用单次卷积神经网络(CNN)模型,一次性预测图像中所有对象的边界框和类别。
YOLO算法的创新点在于将目标检测问题转化为回归问题,直接预测边界框和类别概率。通过这种方式,YOLO算法可以大幅提高目标检测速度,同时保持较高的准确度。
# 2. YOLO算法的理论基础
### 2.1 卷积神经网络(CNN)
卷积神经网络(CNN)是一种深度学习模型,特别适用于处理图像和视频数据。CNN由卷积层、池化层和全连接层组成。
**卷积层:**卷积层使用卷积核在输入数据上滑动,提取特征。卷积核是一个权重矩阵,它与输入数据进行逐元素相乘,然后求和,得到一个新的特征图。
**池化层:**池化层对卷积层的特征图进行下采样,减少特征图的大小。池化操作通常使用最大池化或平均池化。
**全连接层:**全连接层将卷积层和池化层提取的特征扁平化,并连接到一个输出层。输出层使用softmax函数进行分类或回归。
### 2.2 目标检测算法
目标检测算法旨在从图像或视频中识别和定位目标对象。有两种主要的目标检测方法:滑动窗口方法和区域生成网络(RPN)。
#### 2.2.1 滑动窗口方法
滑动窗口方法使用一个固定大小的窗口在图像上滑动。对于每个窗口,算法提取特征并将其输入到分类器中。如果分类器预测窗口包含目标对象,则该窗口被标记为正样本。
**优点:**
* 简单易懂
* 鲁棒性强
**缺点:**
* 计算量大
* 对于小目标或密集目标检测效果不佳
#### 2.2.2 区域生成网络(RPN)
区域生成网络(RPN)是一种用于目标检测的深度学习模型。RPN使用一个卷积神经网络在图像上生成候选区域(region proposals)。候选区域是可能包含目标对象的图像区域。
**优点:**
* 计算量比滑动窗口方法小
* 对于小目标或密集目标检测效果更好
**缺点:**
* 候选区域生成质量对检测精度有较大影响
* 可能产生大量的候选区域,导致计算量增加
### 2.3 YOLO算法的创新点
YOLO算法(You Only Look Once)是一种单次卷积神经网络,它将目标检测问题视为一个回归问题。与传统的滑动窗口方法或RPN方法不同,YOLO算法一次性将整个图像输入网络,并直接输出目标对象的边界框和类别概率。
YOLO算法的创新点在于:
* **单次卷积神经网络:**YOLO算法使用单次卷积神经网络处理图像,避免了滑动窗口方法或RPN方法的多次计算,大大提高了检测速度。
* **回归目标边界框:**YOLO算法将目标检测问题视为一个回归问题,直接输出目标对象的边界框坐标和类别概率,简化了检测过程。
* **端到端训练:**YOLO算法是一个端到端训练的模型,不需要预先训练的候选区域生成网络,简化了训练过程。
# 3. YOLO算法的实践应用**
**3.1 人脸识别**
人脸识别是一项重要的计算机视觉技术,它可以识别和验证个人的身份。YOLO算法在人脸识别领域有着广泛的应用,因为它可以快速准确地检测和识别图像中的人脸。
**3.1.1 人脸检测**
人脸检测是人脸识别中的第一步,它需要确定图像中是否存在人脸。YOLO算法使用卷积神经网络(CNN)来提取图像中的特征,并通过训练来识别这些特征与人脸之间的关系。
```python
import cv2
import numpy as np
# 加载 YOLOv3 模型
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg")
# 加载图像
image = cv2.imread("image.jpg")
# 预处理图像
blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (416, 416), (0, 0, 0), swapRB=True, crop=False)
# 将图像输入网络
net.setInput(blob)
# 前向传播
detections = net.forward()
# 解析检测结果
for detection in detections[0, 0]:
if detection[5] > 0.5:
x1, y1, x2, y2 = detection[0:4] * np.array([image.shape[1], image.shape[0], image.shape[1], image.shape[0]])
cv2.rectangle(image, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2)
# 显示结果
cv2.imshow("Image", image)
cv2.waitKey(0)
```
**代码逻辑分析:**
* `cv2.dnn.readNet`:加载 YOLOv3 模型。
* `cv2.dnn.blobFromImage`:预处理图像,将其转换为网络输入所需的格式。
* `net.setInput`:将预处理后的图像输入网络。
* `net.forward`:进行前向传播,得到检测结果。
* `detections[0, 0]`:获取第一个检测结果。
* `detection[5]`:获取置信度分数。
* `detection[0:4]`:获取边界框坐标。
* `np.array([image.shape[1], image.shape[0], image.shape[1], image.shape[0]])`:将边界框坐标转换为图像坐标。
* `cv2.rectangle`:在图像上绘制边界框。
**3.1.2 人脸识别**
人脸识别是人脸检测的下一步,它需要确定检测到的人脸的身份。YOLO算法可以使用各种人脸识别算法,例如人脸嵌入和人脸验证。
```python
import face_recognition
# 加载已知人脸图像
known_face_encodings = []
known_face_names = []
for file in os.listdir("known_faces"):
image = face_recognition.load_image_file("known_faces/" + file)
face_encoding = face_recognition.face_encodings(image)[0]
known_face_encodings.append(face_encoding)
known_face_names.append(file.split(".")[0])
# 加载未知人脸图像
unknown_face_image = face_recognition.load_image_file("unknown_face.jpg")
# 检测和识别未知人脸
face_locations = face_recognition.face_locations(unknown_face_image)
face_encodings = face_recognition.face_encodings(unknown_face_image, face_locations)
# 匹配未知人脸与已知人脸
for face_encoding in face_encodings:
matches = face_recognition.compare_faces(known_face_encodings, face_encoding)
name = "Unknown"
for match in matches:
if match:
name = known_face_names[matches.index(match)]
break
print(f"Detected {name}")
```
**代码逻辑分析:**
* `face_recognition.load_image_file`:加载人脸图像。
* `face_recognition.face_encodings`:提取人脸特征。
* `face_recognition.face_locations`:检测人脸位置。
* `face_recognition.compare_faces`:匹配人脸特征。
**3.2 无人驾驶**
无人驾驶是一项新兴技术,它依赖于计算机视觉技术来感知周围环境。YOLO算法在无人驾驶领域有着广泛的应用,因为它可以快速准确地检测和识别物体和行人。
**3.2.1 物体检测**
物体检测是无人驾驶中的第一步,它需要确定图像中存在的物体。YOLO算法使用卷积神经网络(CNN)来提取图像中的特征,并通过训练来识别这些特征与物体之间的关系。
```python
import cv2
import numpy as np
# 加载 YOLOv3 模型
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg")
# 加载图像
image = cv2.imread("image.jpg")
# 预处理图像
blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (416, 416), (0, 0, 0), swapRB=True, crop=False)
# 将图像输入网络
net.setInput(blob)
# 前向传播
detections = net.forward()
# 解析检测结果
for detection in detections[0, 0]:
if detection[5] > 0.5:
x1, y1, x2, y2 = detection[0:4] * np.array([image.shape[1], image.shape[0], image.shape[1], image.shape[0]])
cv2.rectangle(image, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2)
label = detection[6]
cv2.putText(image, label, (int(x1), int(y1) - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 显示结果
cv2.imshow("Image", image)
cv2.waitKey(0)
```
**代码逻辑分析:**
* `cv2.dnn.readNet`:加载 YOLOv3 模型。
* `cv2.dnn.blobFromImage`:预处理图像,将其转换为网络输入所需的格式。
* `net.setInput`:将预处理后的图像输入网络。
* `net.forward`:进行前向传播,得到检测结果。
* `detections[0, 0]`:获取第一个检测结果。
* `detection[5]`:获取置信度分数。
* `detection[0:4]`:获取边界框坐标。
* `np.array([image.shape[1], image.shape[0], image.shape[1], image.shape[0]])`:将边界框坐标转换为图像坐标。
* `cv2.rectangle`:在图像上绘制边界框。
* `cv2.putText`:在图像上添加标签。
**3.2.2 行人检测**
行人检测是无人驾驶中的另一项重要任务,它需要确定图像中存在的行人。YOLO算法可以使用与物体检测类似的技术来检测行人。
```python
import cv2
import numpy as np
# 加载 YOLOv3 模型
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg")
# 加载图像
image = cv2.imread("image.jpg")
# 预处理图像
blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (416, 416), (0, 0, 0), swapRB=True, crop=False)
# 将图像输入网络
net.setInput(blob)
# 前向传播
detections = net.forward()
# 解析检测结果
for detection in detections[0, 0]:
if detection[5] > 0.5 and detection[6] == "person":
x1, y1, x2, y2 = detection[0:4] * np.array([image.shape[1], image.shape[0], image.shape[1], image.shape[0]])
cv2.rectangle(image, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2)
# 显示结果
cv2.imshow("Image", image)
cv2.waitKey(0)
```
**代码逻辑分析:**
*
# 4. YOLO算法的进阶应用
### 4.1 YOLOv3算法
#### 4.1.1 特征提取器改进
YOLOv3算法在特征提取器方面进行了改进,采用了新的Darknet-53网络作为骨干网络。Darknet-53网络比YOLOv2中使用的Darknet-19网络更深,具有更多的卷积层和残差块,能够提取更丰富的特征信息。
```
import tensorflow as tf
# 定义Darknet-53网络
def darknet53(input_tensor):
# 卷积层1
x = tf.keras.layers.Conv2D(32, (3, 3), strides=(1, 1), padding='same')(input_tensor)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
# 卷积层2-5
for i in range(5):
x = tf.keras.layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
# 残差块
for i in range(8):
residual = x
x = tf.keras.layers.Conv2D(128, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.Conv2D(128, (3, 3), strides=(1, 1), padding='same')(x)
x = x + residual
# 卷积层6-11
for i in range(4):
x = tf.keras.layers.Conv2D(256, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
# 残差块
for i in range(8):
residual = x
x = tf.keras.layers.Conv2D(512, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.Conv2D(512, (3, 3), strides=(1, 1), padding='same')(x)
x = x + residual
# 卷积层12-17
for i in range(4):
x = tf.keras.layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
return x
# 逻辑分析
# Darknet-53网络是一个卷积神经网络,包含多个卷积层和残差块。
# 卷积层负责提取图像中的特征,残差块可以帮助网络学习更深层次的特征。
# MaxPooling层用于减少特征图的大小,从而降低计算量。
```
#### 4.1.2 检测头改进
YOLOv3算法还改进了检测头,采用了新的SPP(Spatial Pyramid Pooling)模块。SPP模块可以将不同尺度的特征图融合在一起,从而增强算法对不同大小目标的检测能力。
```
import tensorflow as tf
# 定义SPP模块
def spp(input_tensor):
# 最大池化
x1 = tf.keras.layers.MaxPooling2D((1, 1), strides=(1, 1))(input_tensor)
x2 = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(input_tensor)
x3 = tf.keras.layers.MaxPooling2D((4, 4), strides=(4, 4))(input_tensor)
x4 = tf.keras.layers.MaxPooling2D((8, 8), strides=(8, 8))(input_tensor)
# 拼接
x = tf.keras.layers.Concatenate()([x1, x2, x3, x4])
return x
# 逻辑分析
# SPP模块通过对不同尺度的特征图进行最大池化,提取不同尺度的特征。
# 这些特征被拼接在一起,从而增强了网络对不同大小目标的检测能力。
```
### 4.2 YOLOv4算法
#### 4.2.1 骨干网络改进
YOLOv4算法在骨干网络方面进行了改进,采用了新的CSPDarknet53网络作为骨干网络。CSPDarknet53网络在Darknet-53网络的基础上,引入了CSP(Cross Stage Partial)结构,可以减少计算量,提高算法的效率。
```
import tensorflow as tf
# 定义CSPDarknet53网络
def cspdarknet53(input_tensor):
# 卷积层1
x = tf.keras.layers.Conv2D(32, (3, 3), strides=(1, 1), padding='same')(input_tensor)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
# 卷积层2-5
for i in range(5):
x = tf.keras.layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
# CSP块
for i in range(8):
residual = x
x = tf.keras.layers.Conv2D(128, (1, 1), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.Conv2D(128, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.Conv2D(128, (1, 1), strides=(1, 1), padding='same')(x)
x = x + residual
# 卷积层6-11
for i in range(4):
x = tf.keras.layers.Conv2D(256, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
# CSP块
for i in range(8):
residual = x
x = tf.keras.layers.Conv2D(512, (1, 1), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.Conv2D(512, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.Conv2D(512, (1, 1), strides=(1, 1), padding='same')(x)
x = x + residual
# 卷积层12-17
for i in range(4):
x = tf.keras.layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same')(x)
x = tf.keras.layers.MaxPooling2D((2, 2), strides=(2, 2))(x)
return x
# 逻辑分析
# CSPDarknet53网络是一个卷积神经网络,包含多个卷积层和CSP块。
# CSP块可以将特征图分成两部分,一部分经过深度卷积,另一部分经过逐点卷积。
# 然后将这两部分特征图拼接在一起,从而减少计算量,提高算法的效率。
```
#### 4.2.2 检测头改进
YOLOv4算法还改进了检测头,采用了新的PAN(Path Aggregation Network)结构。PAN结构可以将不同尺度的特征图融合在一起,从而增强算法对不同大小目标的检测能力。
```
import tensorflow as tf
# 定义PAN结构
def pan(input_tensors):
# 上采样
x1 = tf.keras.layers.UpSampling2D((2, 2))(input_tensors[0])
x2 = tf.keras.layers.UpSampling2D((4, 4))(input_tensors[1])
x3 = tf.keras.layers.UpSampling2D((8, 8))(input_tensors[2])
# 拼接
x = tf.keras.layers.Concatenate()([x1, x2, x3, input_tensors[3]])
# 卷积层
x = tf.keras.layers.Conv2
# 5. YOLO算法的未来发展趋势
随着人工智能技术的不断发展,YOLO算法也在不断地进化和创新,其未来发展趋势主要体现在以下几个方面:
### 5.1 实时目标检测
实时目标检测是YOLO算法的一个重要发展方向。目前,YOLOv5算法已经能够达到每秒处理数百张图像的实时检测速度,但随着图像分辨率和复杂度的不断提高,实时目标检测仍然面临着挑战。未来的YOLO算法将继续优化模型结构和算法,进一步提高实时检测速度,满足更多应用场景的需求。
### 5.2 多目标跟踪
多目标跟踪是计算机视觉领域的一项重要任务,它要求算法能够同时跟踪多个目标。YOLO算法在多目标跟踪方面也取得了较好的进展,但仍存在一些局限性,例如目标遮挡、目标变形等问题。未来的YOLO算法将通过引入时序信息、利用多模态数据等方式,提高多目标跟踪的精度和鲁棒性。
### 5.3 跨领域应用
YOLO算法最初主要应用于目标检测领域,但随着其性能的不断提升,其应用范围也在不断扩大。未来的YOLO算法将进一步拓展其跨领域应用,例如:
- **医疗影像分析:**YOLO算法可以用于检测和分类医疗影像中的病灶,辅助医生进行诊断和治疗。
- **工业检测:**YOLO算法可以用于检测和分类工业生产中的缺陷,提高生产效率和产品质量。
- **安防监控:**YOLO算法可以用于检测和跟踪安防监控中的异常行为,提高安防系统的效率和安全性。
随着人工智能技术的不断发展,YOLO算法的未来发展趋势将更加广阔,其应用范围也将更加广泛。YOLO算法将继续引领目标检测领域的发展,为各个行业带来新的变革和机遇。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏深入探讨了 YOLO(You Only Look Once)算法,一种用于目标检测的先进算法。从原理到实战,专栏全面解析了 YOLO 算法,帮助读者轻松掌握这一利器。此外,专栏还对比了 YOLOv5 和 YOLOv4,分析了性能提升的关键点,指导读者选择最优模型。
专栏深入解析了 YOLO 算法在目标检测中的应用场景,从人脸识别到无人驾驶,全面掌握其应用潜力。同时,专栏也剖析了 YOLO 算法的局限性,提出了高效的优化方向。通过全面对比,专栏帮助读者选择最适合其需求的目标检测算法。
专栏提供了实战秘籍,指导读者提升 YOLO 算法的训练技巧和调参策略。此外,专栏还介绍了 YOLO 算法在实际项目中的部署和集成,从理论到实践,帮助读者快速上手实战应用。
专栏深入探索了 YOLO 算法在图像分割、视频分析、医疗影像、自动驾驶、安防监控、零售行业、工业检测、农业领域、教育领域、游戏开发、虚拟现实和增强现实中的应用,为读者提供了丰富的应用案例和解决方案。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
模型结果可视化呈现:ggplot2与机器学习的结合
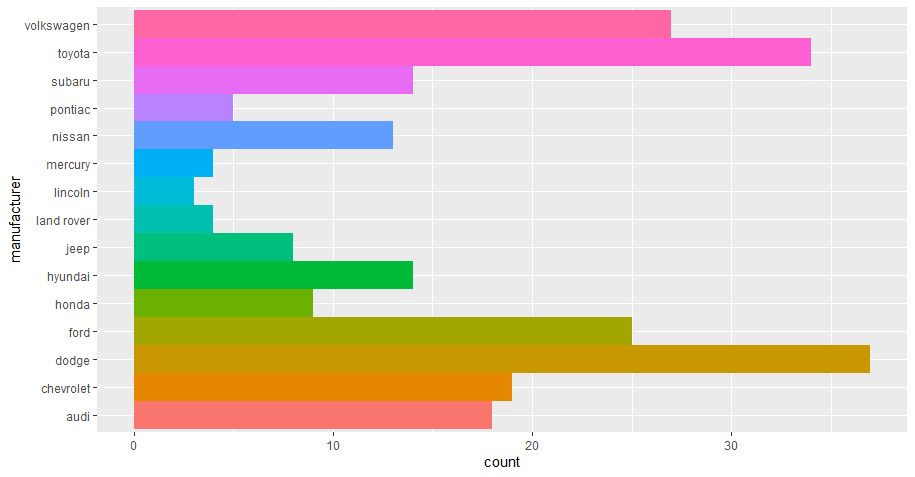
# 1. ggplot2与机器学习结合的理论基础
ggplot2是R语言中最受欢迎的数据可视化包之一,它以Wilkinson的图形语法为基础,提供了一种强大的方式来创建图形。机器学习作为一种分析大量数据以发现模式并建立预测模型的技术,其结果和过程往往需要通过图形化的方式来解释和展示。结合ggplot2与机器学习,可以将复杂的数据结构和模型结果以视觉友好的形式展现
R语言中的数据可视化工具包:plotly深度解析,专家级教程

# 1. plotly简介和安装
Plotly是一个开源的数据可视化库,被广泛用于创建高质量的图表和交互式数据可视化。它支持多种编程语言,如Python、R、MATLAB等,而且可以用来构建静态图表、动画以及交互式的网络图形。
## 1.1 plotly简介
Plotly最吸引人的特性之一
【R语言数据包安全编码实践】:保护数据不受侵害的最佳做法

# 1. R语言基础与数据包概述
## R语言简介
R语言是一种用于统计分析、图形表示和报告的编程语言和软件环境。它在数据科学领域特别受欢迎,尤其是在生物统计学、生物信息学、金融分析、机器学习等领域中应用广泛。R语言的开源特性,加上其强大的社区
R语言tm包中的文本聚类分析方法:发现数据背后的故事

# 1. 文本聚类分析的理论基础
## 1.1 文本聚类分析概述
文本聚类分析是无监督机器学习的一个分支,它旨在将文本数据根据内容的相似性进行分组。文本数据的无结构特性导致聚类分析在处理时面临独特挑战。聚类算法试图通过发现数据中的自然分布来形成数据的“簇”,这样同一簇内的文本具有更高的相似性。
## 1.2 聚类分
【lattice包与其他R包集成】:数据可视化工作流的终极打造指南
# 1. 数据可视化与R语言概述
数据可视化是将复杂的数据集通过图形化的方式展示出来,以便人们可以直观地理解数据背后的信息。R语言,作为一种强大的统计编程语言,因其出色的图表绘制能力而在数据科学领域广受欢迎。本章节旨在概述R语言在数据可视化中的应用,并为接下来章节中对特定可视化工具包的深入探讨打下基础。
在数据科学项目中,可视化通
文本挖掘中的词频分析:rwordmap包的应用实例与高级技巧

# 1. 文本挖掘与词频分析的基础概念
在当今的信息时代,文本数据的爆炸性增长使得理解和分析这些数据变得至关重要。文本挖掘是一种从非结构化文本中提取有用信息的技术,它涉及到语言学、统计学以及计算技术的融合应用。文本挖掘的核心任务之一是词频分析,这是一种对文本中词汇出现频率进行统计的方法,旨在识别文本中最常见的单词和短语。
词频分析的目的不仅在于揭
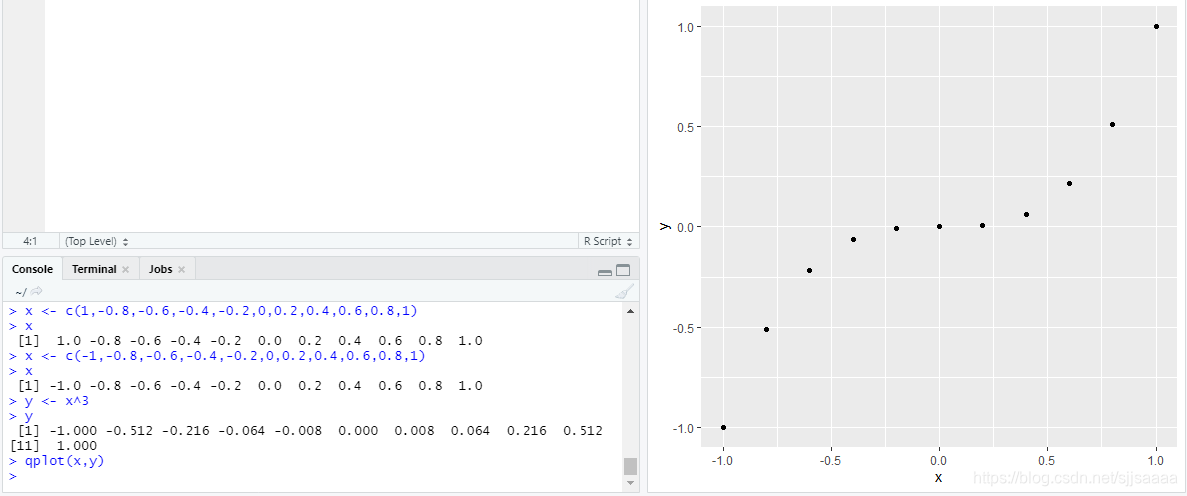
【R语言qplot深度解析】:图表元素自定义,探索绘图细节的艺术(附专家级建议)

# 1. R语言qplot简介和基础使用
## qplot简介
`qplot` 是 R 语言中 `ggplot2` 包的一个简单绘图接口,它允许用户快速生成多种图形。`qplot`(快速绘图)是为那些喜欢使用传统的基础 R 图形函数,但又想体验 `ggplot2` 绘图能力的用户设
R语言图形变换:aplpack包在数据转换中的高效应用
# 1. R语言与数据可视化简介
在数据分析与科学计算的领域中,R语言凭借其强大的统计分析能力和灵活的数据可视化方法,成为了重要的工具之一
【Tau包自定义函数开发】:构建个性化统计模型与数据分析流程

# 1. Tau包自定义函数开发概述
在数据分析与处理领域, Tau包凭借其高效与易用性,成为业界流行的工具之一。 Tau包的核心功能在于能够提供丰富的数据处理函数,同时它也支持用户自定义函数。自定义函数极大地提升了Tau包的灵活性和可扩展性,使用户可以针对特定问题开发出个性化的解决方案。然而,要充分利用自定义函数,开发者需要深入了解其开发流程和最佳实践。本章将概述Tau包自定义函数开发的基本概
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )