无人机视觉降落目标检测与跟踪:技术与应用实例分析

摘要
无人机视觉降落技术是实现无人机精确降落的关键,涉及目标检测和跟踪两大核心技术。本文概述了无人机视觉降落的基本概念和重要性,详细探讨了目标检测和跟踪技术的理论基础、实践应用以及性能评估,包括深度学习、不同跟踪算法的分类和实际案例分析。文中还分析了视觉系统集成和降落策略的制定,并对影响视觉降落的环境因素进行了讨论。通过具体应用实例,本文展示了无人机视觉降落技术在军事和民用领域的应用效果。最后,对未来无人机视觉降落技术的发展趋势和面临的挑战进行了展望。
关键字
无人机视觉降落;目标检测;目标跟踪;深度学习;系统集成;技术挑战
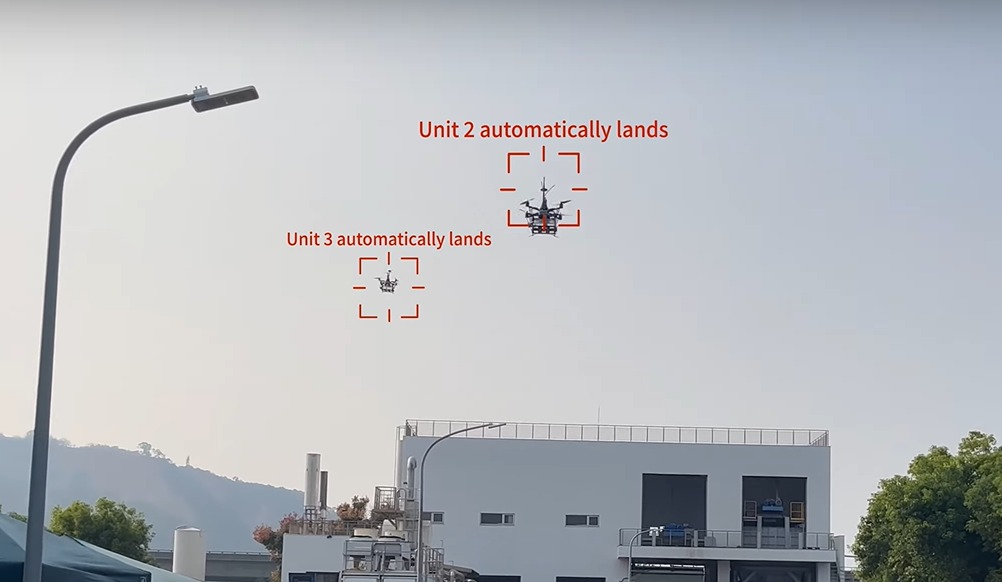
参考资源链接:无人机精准降落:基于阶层标识的自主着陆技术
1. 无人机视觉降落目标检测与跟踪概述
1.1 无人机降落技术的重要性
无人机视觉降落作为无人机自主操作的关键技术之一,直接关系到无人机的安全性和实用性。目标检测与跟踪是实现精确降落的核心,它允许无人机识别降落区并实时调整飞行路径以适应环境变化。
1.2 目标检测与跟踪的技术挑战
视觉降落系统需要应对不断变化的环境,如光照、天气以及复杂背景等干扰因素。因此,目标检测算法要具备高度的鲁棒性,而跟踪算法需要实时、准确地对目标位置进行预测和更新。
1.3 目标检测与跟踪的应用前景
随着深度学习技术的发展,视觉降落技术的应用前景十分广阔。无论是军事侦察、灾难响应,还是民用航拍、物流配送等,视觉降落技术都能显著提升无人机的作业效率和安全性能。
2. 目标检测技术的理论与实践
2.1 目标检测技术的基本原理
2.1.1 目标检测技术的发展历程
目标检测是计算机视觉领域的基础任务之一,旨在识别并定位图像中的一个或多个目标物体。从经典的模板匹配到基于机器学习的方法,再到深度学习的革新,目标检测技术经历了数十年的演进。
1960s-1980s:模板匹配与启发式方法
在深度学习出现之前,目标检测主要依赖于手工设计特征的匹配。例如,早期的模板匹配方法,通过在图像中滑动预定义的模板来寻找相似区域。这种方法简单直观,但在面对复杂场景时效果有限。
1990s-2000s:机器学习方法的引入
随着机器学习技术的发展,目标检测领域开始引入了像支持向量机(SVM)、随机森林等分类器。这些方法通常先提取图像特征,再训练分类器来识别物体。这类方法对特征工程的要求较高,但相比于模板匹配,具有更好的泛化能力。
2010s至今:深度学习的崛起
深度学习的兴起彻底改变了目标检测的格局。基于卷积神经网络(CNN)的方法可以自动从数据中学习特征表示,显著提升了目标检测的准确度和鲁棒性。特别是R-CNN、YOLO、SSD等一系列表现卓越的框架,为视觉目标检测带来了革命性的进步。
2.1.2 主流的目标检测算法解析
如今,目标检测领域已发展出多种高效的算法,这些算法在速度、准确度和易用性等方面各有侧重。
R-CNN系列
R-CNN系列(Region-based CNNs)通过候选区域提取、区域建议网络(RPN)等步骤,实现对目标的检测。R-CNN及其变种(如Fast R-CNN和Faster R-CNN)虽然检测精度高,但速度较慢,不适于实时检测。
YOLO系列
YOLO(You Only Look Once)系列算法将目标检测视为一个回归问题,通过单一神经网络直接从图像像素到边界框坐标和类别概率的映射。YOLO算法实现了速度和准确率的较好平衡,特别适合实时系统。
SSD系列
SSD(Single Shot MultiBox Detector)结合了R-CNN的区域建议和YOLO的单次检测的优点,能够在不同尺度上进行目标检测,保持了较高的检测精度的同时,速度也较优。
2.2 深度学习在目标检测中的应用
2.2.1 卷积神经网络(CNN)在目标检测中的作用
CNN是深度学习在图像处理领域中的核心组件,它通过卷积层、池化层、全连接层等结构自动学习图像的层次化特征。
特征提取
卷积层能够提取图像中的局部特征,如边缘、角点等,并通过逐层叠加形成对复杂图像结构的抽象描述。这对于目标检测尤为重要,因为不同的图像区域包含的特征信息可能差异很大。
特征融合
深度CNN能够将多个层次的特征进行融合,这使得网络能够同时获取粗略的全局信息和精细的局部信息。这对于实现对复杂场景中目标的有效检测至关重要。
语义理解
CNN通过其深层次结构能够捕捉图像中的高级语义信息,这对于区分目标与背景,以及不同类别目标之间的差异性至关重要。
2.2.2 实际案例分析:深度学习模型训练与部署
在本案例中,我们将探讨如何使用深度学习框架如TensorFlow或PyTorch来训练一个目标检测模型,并在无人机视觉系统中进行部署。
数据收集与预处理
首先,需要收集包含目标物体的大量图片数据。这些数据需要进行标注,即在每个目标周围画上边界框,并标记目标类别。之后,数据需要经过归一化和增强等预处理步骤以提高模型泛化能力。
- import tensorflow as tf
- # 加载数据集
- def load_dataset(image_paths, labels, batch_size):
- dataset = tf.data.Dataset.from_tensor_slices((image_paths, labels))
- dataset = dataset.map(lambda x, y: (tf.io.read_file(x), y))
- dataset = dataset.map(parse_function, num_parallel_calls=tf.data.experimental.AUTOTUNE)
- dataset = dataset.shuffle(buffer_size=1024).batch(batch_size)
- return dataset
- def parse_function(filename, label):
- image_string = tf.io.read_file(filename)
- image = tf.image.decode_jpeg(image_string, channels=3)
- image = tf.image.convert_image_dtype(image, tf.float32)
- return image, label
模型训练
选择一个适合的目标检测模型(如Faster R-CNN或YOLO)作为基础架构。使用之前准备好的数据集进行训练,通常需要设置学习率、优化器、损失函数等超参数。训练过程中会不断调整网络权重以最小化损失函数。
- model = load_model() # 加载预定义模型
- # 定义损失函数和优化器
- loss_object = tf.keras.losses.BinaryCrossentropy(from_logits=True)
- optimizer = tf.keras.optimizers.Adam()
- train_loss = tf.keras.metrics.Mean(name='train_loss')
- @tf.function
- def train_step(images, labels):
- with tf.GradientTape() as tape:
- predictions = model(images, training=True)
- loss = loss_object(labels, predictions)
- gradients = tape.gradient(loss, model.trainable_variables)
- optimizer.apply_gradients(zip(gradients, model.trainable_variables))
- train_loss(loss)
模型部署
训练完成后,将模型转化为可部署的形式。对于实时系统,可以使用ONNX、TensorRT等工具进行模型优化,确保模型在硬件平台上的运行效率。
- # 将模型转换为ONNX格式
- import onnx
- model_onnx = onnx.load("model.onnx")
- onnx.checker.check_model(model_onnx)
2.3 目标检测算法的性能评估
2.3.1 检测精度和速度的权衡
在目标检测领域,检测精度和速度往往需要做出权衡。高精度的模型往往包含更多的参数和复杂的结构,导致推理速度较慢;相反,轻量级的模型虽然速度快,但可能无法达到高精度的要求。
检测精度
检测精度通常使用标准的检测指标进行评估,如平均精度均值(mAP)。mAP是对不同交并比(Intersection over Union, IoU)阈值下,所有检测框的平均精度的平均值。
推理速度
推理速度通常用每秒处理的帧数(FPS)来衡量。在实际部署中,需要根据应用场景对速度的要求选择合适的目标检测模型。
2.3.2 实验结果分析与优化策略
在实验中,我们将对不同算法进行对比,通过一系列评估指标来分析其性能表现。同时,结合具体的业务需求,提出优化策略。
实验设计
我们设计了一系列实验来评估目标检测算法的性能。实验包括在不同的数据集上训练和测试模型,记录其mAP和FPS表现,并进行统计

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )

专栏目录

文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
NSIS卸载脚本秘籍:如何创建完美保留文件夹的卸载程序(权威指南)
【系统分析篇】:操作系统原理深度剖析与10大优化策略揭秘
【音频解码技术深度剖析】:揭秘MP3和WAV格式在数字音乐盒中的解析秘籍
【Spring Boot文件存储】:这些实践让你的jar包更轻巧
VSCode中文显示优化秘籍:一步到位的终极设置
Kepserver连接SQL数据库:数据读写效率倍增【技术指南】与事务优化
【数字逻辑】可调频率PWM:数字逻辑实现技术详解
图像融合技术的框架构建:构建应对证据冲突的系统设计原则
51单片机存储器组织与寄存器映射深度探索:专家级知识分享
【文件系统故障快速修复指南】:定位与解决文件系统错误的专家技巧


专栏目录
文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )










