YOLOv8入门至精通:从零开始构建训练至部署的完整攻略
发布时间: 2024-12-11 13:15:20 阅读量: 4 订阅数: 11 

YOLOv8模型部署指南:从训练到实战应用
# 1. YOLOv8简介与安装
## 1.1 YOLOv8的背景
YOLOv8,作为流行的实时目标检测系列算法的最新成员,由Joseph Redmon和Ali Farhadi等人领衔开发。YOLO(You Only Look Once)算法以其快速、准确的特点,在众多视觉任务中得到广泛的应用。YOLOv8的推出,进一步强化了该系列在速度和精度上的竞争力。
## 1.2 安装YOLOv8
安装YOLOv8前,请确保你的系统满足以下要求:Python 3.8+、CUDA 11.1+(GPU支持),以及cuDNN v8+。接下来,你可以选择使用GPU支持的预编译版本,还是从源代码编译安装。
以使用GPU支持的预编译版本为例,首先,你将需要安装PyTorch。可以通过以下命令安装(确保选择和你的CUDA版本相匹配的PyTorch版本):
```bash
pip install torch torchvision torchaudio
```
然后,通过pip安装YOLOv8:
```bash
pip install yolov8
```
如果你需要编译安装,可以克隆官方仓库,然后按照说明操作:
```bash
git clone https://github.com/ultralytics/yolov8.git
cd yolov8
pip install -r requirements.txt
pip install .
```
确保安装完成后,你可以通过简单的测试代码来验证安装是否成功:
```python
import torch
from yolov8 import YOLOv8
model = YOLOv8()
result = model(torch.randn(1, 3, 640, 640))
```
如果模型正确加载并返回结果,则表明你的YOLOv8已成功安装。接下来,你可以进一步探究YOLOv8的理论基础和应用实践。
# 2. YOLOv8的理论基础
YOLOv8作为系列算法中最新的成员,在继承了前代算法诸多优良特性的基础上,引入了创新的改进,提高了模型的准确性和效率。本章节将深入剖析YOLOv8的理论基础,包括算法系列的发展史、架构解析以及训练原理。
### 2.1 YOLO算法系列的发展史
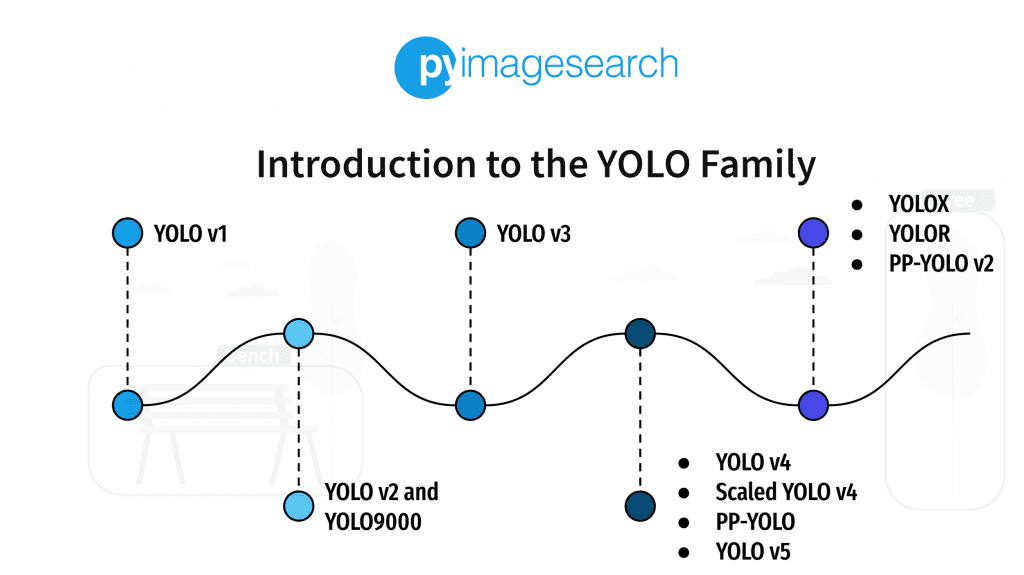
YOLO算法自2015年由Joseph Redmon首次提出以来,以其速度快、准确度高著称,迅速成为目标检测领域的重要算法。随后,Redmon和其团队推出了YOLOv2、v3以及v4版本,不断改进和优化。而YOLOv5和v6则是由独立开发者在原有基础上做出的最新版本。
#### 2.1.1 YOLOv1到YOLOv4的演进
YOLOv1的设计理念是将目标检测问题转化为回归问题,将一张图像划分为多个格子,并预测每个格子中目标的边界框和类别概率。它以高帧率领先于当时的检测算法。在YOLOv2中,作者引入了Darknet-19网络架构,并优化了边界框预测方法,提高了检测的准确率。YOLOv3则进一步提出了多尺度检测,增强了模型对小目标的识别能力,并且改进了网络结构,使得准确率得到大幅提升。YOLOv4则在v3的基础上引入了更多的改进,如Mish激活函数、自对抗训练等。
#### 2.1.2 YOLOv5与YOLOv6的特点分析
YOLOv5脱离了原有的版本命名规则,由Ultralytics公司开发。它不仅保留了YOLO系列一贯的速度优势,而且通过使用更轻量级的网络结构和改进的训练策略进一步提升了准确性。YOLOv6则是中国学者提出的版本,它保留了YOLOv5的轻量级特性,并通过引入高效注意力机制等技术改进了模型性能。
### 2.2 YOLOv8的架构解析
YOLOv8引入了新的网络结构,以及针对特征提取和损失函数的改进措施,同时还改良了锚框机制和聚类算法,以进一步提升检测的精度。
#### 2.2.1 网络结构概述
YOLOv8的网络结构融合了深度可分离卷积和残差连接等现代网络技术,以达到降低计算量的同时提高特征提取能力的目的。它还采用了多尺度特征融合技术,使模型可以更好地处理不同尺度的目标。
```python
import torch
import torch.nn as nn
class YOLOv8Backbone(nn.Module):
def __init__(self):
super(YOLOv8Backbone, self).__init__()
# Define layers here
# ...
def forward(self, x):
# Forward pass logic
# ...
return x
# 实例化模型
model = YOLOv8Backbone()
```
#### 2.2.2 特征提取和损失函数
YOLOv8使用了改进的特征提取技术,包括空间金字塔池化等,以更好地处理图像的空间信息。同时,损失函数也进行了优化,引入了更多的损失项和平衡参数,以优化模型在检测速度和准确度之间的平衡。
```python
class YOLOv8Loss(nn.Module):
def __init__(self):
super(YOLOv8Loss, self).__init__()
# Define loss components here
# ...
def forward(self, predictions, targets):
# Compute loss here
# ...
return loss
```
#### 2.2.3 改进的锚框机制和聚类算法
YOLOv8的锚框机制利用聚类算法来自动确定边界框的大小和比例,使其更加适应不同数据集的特点。这一改进显著提高了检测的准确性和泛化能力。
### 2.3 YOLOv8的训练原理
为了训练出高性能的YOLOv8模型,需要合理地组织和预处理数据、优化训练策略,以及利用迁移学习和微调技术。
#### 2.3.1 数据预处理与增强
数据预处理与增强是提高模型泛化能力的重要手段。YOLOv8通过多种数据增强技术,如随机裁剪、颜色调整、缩放和旋转等,增加了训练样本的多样性,从而提高模型对新场景的适应能力。
#### 2.3.2 训练策略和超参数调优
在YOLOv8的训练过程中,采用了一些高效的训练策略,如学习率预热、余弦退火等,以稳定训练过程并防止过拟合。超参数的调优,如批量大小、学习率、权重衰减等,是模型训练中的关键因素。
#### 2.3.3 迁移学习与微调技术
在有限数据集的情况下,迁移学习可以有效利用预训练模型中的知识。YOLOv8通过微调预训练模型的权重,可以更快地适应新任务,尤其是在数据量较少的情况下,可以显著缩短训练时间并提升模型性能。
# 3. YOLOv8实践训练流程
## 3.1 环境准备与配置
### 3.1.1 依赖库安装与环境搭建
要开始YOLOv8的实践训练,首先需要确保你的计算环境已经搭建了必要的依赖库。YOLOv8的训练和部署环境通常需要支持CUDA和cuDNN的GPU设备,以及安装了以下依赖库:
- Python 3.7或更高版本
- PyTorch 1.8或更高版本
- CUDA 11.1或更高版本
- cuDNN 8.0或更高版本
为了方便管理Python环境,推荐使用`conda`环境管理器。以下是一份示例环境搭建脚本:
```bash
conda create --name yolov8 python=3.8
conda activate yolov8
conda install pytorch torchvision torchaudio cudatoolkit=11.1 -c pytorch -c nvidia
```
此外,YOLOv8还可能需要一些额外的库,例如`numpy`, `pandas`, `matplotlib`等,可以通过以下命令安装:
```bash
pip install numpy pandas matplotlib opencv-python
```
### 3.1.2 数据集的准备与格式化
训练YOLOv8模型需要一个预处理过的数据集。通常,YOLOv8使用标注格式为`.txt`和图像文件存储在同一个目录下的结构。每张图片的标注文件应当与图片同名,例如,`image.jpg`对应的标注文件为`image.txt`。
标注文件中每行代表一个物体,格式为:`<class> <x_center> <y_center> <width> <height>`,其中各项都是相对于图像宽度和高度的比例值。
例如,对于一张图片中的一个行人,其标注可能是这样的:
```
0 0.4 0.3 0.5 0.7
```
表示这是一个类别为0(假设类别0为行人)的物体,中心位于图像宽度的40%和高度的30%,宽度和高度分别是图像宽度的50%和70%。
在准备完数据集后,通常还需要编写脚本将其转换为YOLOv8训练所需的格式,包括将标注信息转换为上述格式,并可能需要进行数据增强以扩充训练集。
## 3.2 训练过程详解
### 3.2.1 训练前的参数设置
YOLOv8的训练参数配置一般通过配置文件来指定,常见的参数包括但不限于:
- `epochs`: 训练的总轮数
- `batch_size`: 训练时每一批次的图片数量
- `img_size`: 训练图片的尺寸
- `learning_rate`: 学习率
- `optimizer`: 优化器类型,如`adam`或`sgd`
- `weights`: 预训练权重文件路径
一个典型的配置文件示例(yolov8.cfg)可能如下所示:
```yaml
[training]
epochs=100
batch_size=16
img_size=640
learning_rate=0.01
optimizer=adam
[dataset]
path=/path/to/dataset/
names=['person', 'car', 'bicycle'] # 根据数据集的类别进行修改
```
### 3.2.2 训练命令的执行与监控
在设置好配置文件后,开始训练的命令可能如下:
```bash
python train.py --cfg yolov8.cfg
```
执行该命令后,YOLOv8将开始训练过程。训练过程中,它会将模型参数保存在指定的路径中,并且会输出训练过程中的损失曲线,以便监控训练效果。
### 3.2.3 中断与续训操作
如果训练过程中出现中断(例如由于系统故障),YOLOv8支持从中断点继续训练。只要确保中断前保存的权重文件和配置文件没有被删除,就可以通过以下命令进行续训:
```bash
python train.py --cfg yolov8.cfg --weights yolov8_last.pt
```
其中`yolov8_last.pt`是训练中断前保存的权重文件。
## 3.3 模型评估与优化
### 3.3.1 模型性能评估指标
模型训练完成后,通常需要在验证集上评估模型的性能。常用的性能评估指标包括:
- mAP (mean Average Precision)
- Precision-Recall 曲线
- F1 分数
- IoU (Intersection over Union)
YOLOv8训练完成后,使用以下命令在验证集上进行性能评估:
```bash
python val.py --weights yolov8_best.pt --data yolov8_data.yaml
```
其中`yolov8_best.pt`是训练过程中表现最好的权重文件,`yolov8_data.yaml`是包含了验证集路径和类别信息的配置文件。
### 3.3.2 模型的错误分析与改进
模型训练完成后,错误分析是模型优化的重要步骤。通常会收集在验证集上的预测结果,对比真实标注,分析模型的漏检、误检、定位不准确等问题。
错误分析可以通过绘制混淆矩阵、错误案例的可视化展示等方式进行。根据错误分析的结果,可以调整训练策略,比如增加数据增强、调整损失函数、修改模型结构等,以改善模型性能。
### 3.3.3 模型压缩与加速策略
对于实际部署的应用,模型的大小和推理速度是非常关键的因素。YOLOv8可以通过一些压缩与加速策略来优化模型:
- 使用模型剪枝技术减少模型参数数量
- 进行量化训练,减少模型对计算资源的需求
- 使用知识蒸馏,将大型模型的知识转移到小型模型中
- 利用神经网络架构搜索(NAS)探索更高效的模型结构
这些策略可以单独使用,也可以组合使用,以达到模型轻量化和加速的目的。
以上章节通过详尽的步骤和示例代码,展示了一个完整的YOLOv8训练和评估流程,为IT行业从业者提供了深入学习和实践的基础。
# 4. YOLOv8的高级应用
在技术世界中,高级应用的探索与实践总是令人兴奋的。本章将重点介绍YOLOv8在不同领域的应用案例、模型扩展与定制以及与其他技术的融合。通过具体的应用示例、实际操作步骤和策略,我们将深入探究YOLOv8如何在实际中发挥其强大功能。
## 4.1 YOLOv8在不同领域的应用案例
YOLOv8作为一种先进的目标检测模型,在多个行业中已经找到了实际应用。让我们仔细了解在人机交互、视频监控和自动驾驶等领域的应用情况。
### 4.1.1 人机交互系统的应用
人机交互系统通过检测用户的手势或身体姿态,实现了用户与计算机之间的非接触式交互。YOLOv8由于其高速度和准确性,成为这类系统的一个重要支持技术。
#### 人机交互系统中的YOLOv8实践
在人机交互系统中,YOLOv8可以被用来识别和解释用户的手势或运动。例如,当用户指向某个方向时,系统可以根据手势方向来控制屏幕上光标的移动。
```python
import cv2
import numpy as np
import torch
# 加载预训练的YOLOv8模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
# 打开摄像头
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
# 对帧进行推理
results = model(frame)
# 处理检测结果,提取手势信息
for result in results.xyxy[0]:
x1, y1, x2, y2, conf, cls = result
if int(cls) == 指定手势类别ID:
# 根据手势进行特定动作,例如移动光标
# 实现代码省略
# 显示处理后的帧
cv2.imshow('frame', frame)
# 按 'q' 退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
```
在上述代码中,我们通过摄像头实时捕获视频帧,并使用YOLOv8模型进行手势检测。一旦检测到指定的手势类别,就执行对应的操作,比如移动光标。
### 4.1.2 视频监控系统的应用
视频监控系统中,YOLOv8可用于实时监控场景中的异常事件检测,如非法入侵、遗留物品或者人群异常聚集等。
#### 视频监控系统中的YOLOv8应用
为了检测监控场景中的异常事件,我们首先需要训练YOLOv8模型识别不同类型的异常行为。一旦模型训练完成,就可以部署到监控系统中,实时分析视频流。
```python
# 异常行为检测逻辑示例(伪代码)
# 加载训练好的YOLOv8模型
model = torch.hub.load('ultralytics/yolov5', 'custom', path='path_to_trained_model.pt')
# 打开视频文件或视频流
cap = cv2.VideoCapture('path_to_video')
while True:
ret, frame = cap.read()
if not ret:
break
# 对帧进行推理,识别异常行为
results = model(frame)
# 处理检测结果,判断是否为异常行为
# 实现代码省略
# 根据检测结果执行相应操作,比如报警
# 实现代码省略
# 显示处理后的帧
cv2.imshow('frame', frame)
# 按 'q' 退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
```
### 4.1.3 自动驾驶中的应用
自动驾驶技术中,YOLOv8被用于实现环境感知,检测和分类道路上的车辆、行人、交通标志等,对实现安全驾驶至关重要。
#### 自动驾驶系统中的YOLOv8应用
在自动驾驶系统中,YOLOv8模型可以被用来实时检测周围环境,并及时反馈给控制系统,以便做出正确的驾驶决策。
```python
# 自动驾驶中环境感知逻辑示例(伪代码)
# 加载预训练好的YOLOv8模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
# 假设有一个自动驾驶的控制系统
# 系统通过YOLOv8获取环境信息,并进行决策
while True:
# 捕获车辆摄像头的帧
frame = capture_frame_from_camera()
# 使用YOLOv8模型检测物体
results = model(frame)
# 处理检测结果,获取车辆、行人等信息
# 实现代码省略
# 将检测结果传递给自动驾驶控制系统
# 控制系统根据检测结果做出决策
# 实现代码省略
# 显示处理后的帧
cv2.imshow('frame', frame)
# 按 'q' 退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放资源
cv2.destroyAllWindows()
```
## 4.2 YOLOv8的模型扩展与定制
除了在各个应用领域中使用标准的YOLOv8模型,研究人员和工程师们还能够根据具体需求对模型进行扩展和定制。
### 4.2.1 模型的微调与适配
针对特定的应用场景,如医疗图像分析、工业检测等,可能需要对YOLOv8进行微调以获得更好的性能。
#### 微调YOLOv8模型的步骤
微调(Fine-tuning)是机器学习中常用的技术,以适应新领域的特定需求。以下是微调YOLOv8模型的基本步骤:
1. **准备数据集**:收集并标记适用于新应用的数据集。
2. **修改模型架构**:根据需要对模型进行修改,例如添加或删除层。
3. **训练新模型**:使用新数据集来训练模型。
4. **评估和测试**:验证模型在新领域的性能,并进行必要的调整。
### 4.2.2 自定义数据集的训练
自定义数据集的训练需要对YOLOv8进行一定的配置,确保它能够处理并学习新的数据特征。
#### 使用自定义数据集训练YOLOv8
为了使用自定义数据集训练YOLOv8模型,我们需要修改配置文件以匹配新数据集的特点。
```yaml
# 模型配置文件示例(部分)
nc: 20 # 类别数
names: ['类别1', '类别2', ...] # 类别名称
train: /path_to_train_data # 训练数据文件夹路径
val: /path_to_val_data # 验证数据文件夹路径
# 其他配置...
```
### 4.2.3 新颖架构的探索
在某些情况下,研究者可能会探索新的模型架构来实现更好的性能或优化特定功能。
#### 探索YOLOv8的新架构
探索新架构涉及复杂的网络设计和实验过程。这里是一个简化的例子来说明这个过程:
```python
# 导入必要的库
import torch
import torch.nn as nn
# 设计一个新的网络层
class CustomLayer(nn.Module):
def __init__(self):
super(CustomLayer, self).__init__()
# 初始化层参数
def forward(self, x):
# 实现前向传播逻辑
return x
# 将新层集成到YOLOv8网络中
class YOLOv8WithCustomLayer(nn.Module):
def __init__(self):
super(YOLOv8WithCustomLayer, self).__init__()
# 初始化标准YOLOv8模型的层
# 添加自定义层
self.custom_layer = CustomLayer()
def forward(self, x):
# 实现整个网络的前向传播逻辑
x = self.standard_yolov8_layers(x)
x = self.custom_layer(x)
return x
# 创建模型实例,并进行训练和测试
model = YOLOv8WithCustomLayer()
# 训练代码省略
# 测试代码省略
```
## 4.3 YOLOv8与其他技术的融合
YOLOv8不仅仅局限于图像处理,它还可以与其他AI技术相融合,扩展其应用范围和功能。
### 4.3.1 YOLOv8与NLP技术的结合
通过集成自然语言处理(NLP)技术,YOLOv8可以实现图像描述生成或者视觉问答等任务。
#### YOLOv8与NLP结合的示例
以下是一个简化的例子,说明如何将YOLOv8的检测结果与NLP结合。
```python
# 导入必要的库
import torch
from transformers import pipeline
# 加载预训练的YOLOv8模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
# 加载NLP文本生成模型
generator = pipeline('text-generation', model='gpt2')
# 对图像进行检测
results = model('path_to_image.jpg')
# 获取检测结果中的对象信息
objects = results.xyxy[0][:, -1].tolist() # 假设对象ID存储在最后一个元素
# 使用NLP模型生成图像描述
descriptions = [generator('描述此图像中的对象:' + str(obj))[0]['generated_text'] for obj in objects]
# 输出描述结果
for desc in descriptions:
print(desc)
```
### 4.3.2 YOLOv8与强化学习的集成
强化学习在自动驾驶和机器人导航中有广泛的应用。YOLOv8可以作为感知组件集成到强化学习系统中,提供环境状态信息。
#### YOLOv8与强化学习集成的示例
这个例子将说明如何将YOLOv8集成到一个简单的强化学习系统中。
```python
# 伪代码示例
import torch
from reinforcement_learning_agent import Agent # 假设存在一个强化学习代理
# 加载YOLOv8模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
# 创建强化学习代理
agent = Agent()
# 模拟环境交互
for episode in range(num_episodes):
observation = get_initial_observation() # 获取初始观察
while not terminal_state:
# 使用YOLOv8检测当前环境
results = model(observation)
# 将检测结果转化为强化学习状态
state = convert_results_to_state(results)
# 代理选择动作
action = agent.act(state)
# 执行动作并观察新状态和奖励
new_observation, reward = take_action(action)
# 更新代理的学习
agent.learn(state, action, reward)
observation = new_observation
```
通过本节介绍的内容,我们可以看到YOLOv8不仅是一个强大的目标检测模型,而且它具有广泛的扩展性和与其他技术的融合潜力。下一章,我们将深入探讨YOLOv8的模型部署与优化,确保它能在实际的生产环境中发挥最大的效能。
# 5. YOLOv8模型部署与优化
## 5.1 模型转换与部署工具介绍
### 5.1.1 模型转换流程与工具选择
在深度学习模型部署之前,模型转换是一个不可或缺的步骤。YOLOv8模型的转换过程涉及将训练好的模型格式转换为能在不同平台上运行的格式。例如,我们需要将YOLOv8模型从PyTorch格式转换为ONNX、TensorFlow或者是TorchScript格式。
转换工具的选用取决于我们的目标部署平台。比如使用`torchvision`可以轻松导出PyTorch模型到ONNX格式,而`ONNX Runtime`允许我们在不同的硬件和操作系统上运行ONNX模型。使用TensorRT可以进一步优化ONNX模型,以获得更快的推理速度。
### 5.1.2 部署平台与环境配置
部署平台的选择非常关键,它直接影响到YOLOv8模型的性能和兼容性。常见的部署平台包括NVIDIA的Jetson系列嵌入式设备、各类CPU平台以及云计算平台等。
在配置部署环境时,需要考虑以下几个方面:
- 操作系统兼容性:确保所选平台的操作系统与模型转换工具兼容。
- 硬件支持:验证硬件是否满足模型推理的最低需求。
- 依赖库:安装必要的软件包和库文件,如`CUDA`, `cuDNN`等。
此外,还应该准备一些用于测试的工具,如`tensorboard`, `netron`, `trtexec`等,用于监控和分析模型性能。
## 5.2 实时目标检测系统部署
### 5.2.1 实时性能优化策略
对于实时目标检测系统,性能优化是关键。YOLOv8已经经过优化可以实现实时检测,但在部署时,我们可以从以下几个方面进一步提升性能:
- 网络剪枝:去除不重要的网络节点,减少计算量。
- 量化:将模型中的浮点数转换为整数,降低模型大小和运算复杂度。
- 并行计算:利用多线程或多GPU并行处理输入数据,缩短推理时间。
### 5.2.2 边缘计算设备部署实例
边缘计算设备通常指的是那些可以独立或半独立完成计算任务的设备,如NVIDIA Jetson系列。在边缘设备上部署YOLOv8模型需要考虑以下步骤:
- 安装NVIDIA驱动及SDK。
- 安装并配置JetPack,包括操作系统、CUDA、cuDNN等。
- 部署YOLOv8模型并进行本地测试。
- 优化性能参数,如调整TensorRT优化器设置。
### 5.2.3 云平台部署方案
对于需要大规模部署的场景,云平台是一个理想的选择。云平台可以提供弹性的计算资源,支持高并发访问,并且拥有完善的监控和日志记录功能。部署YOLOv8模型到云平台通常包括:
- 在云服务器上安装适当的深度学习框架和推理引擎。
- 将模型通过API或其他服务形式暴露给外部。
- 设置自动扩展机制,根据需求调整资源分配。
- 设置安全机制,如访问控制和数据加密。
## 5.3 模型优化与监控
### 5.3.1 模型部署后的性能调优
部署后的模型优化通常涉及参数调整、硬件资源管理等。性能调优的一个重要方面是延迟和吞吐量的权衡。例如,在保证足够准确率的同时,可能需要牺牲一些性能来获得更快的响应时间。
使用一些现成的性能分析工具,如TensorBoard和NVIDIA的Nsight,可以帮助我们理解模型的运行瓶颈,并针对这些瓶颈进行优化。
### 5.3.2 系统监控与故障排除
部署模型后,系统监控变得至关重要,它可以帮助我们及时发现问题和潜在的故障。系统监控可以从以下几个方面入手:
- 资源使用:监控CPU、GPU、内存和磁盘的使用率。
- 性能指标:跟踪响应时间和吞吐量指标。
- 错误日志:记录系统错误、异常行为等,并进行实时报警。
故障排除时,首先应检查系统日志,寻找错误或异常信息,并根据日志提示进行故障诊断。
### 5.3.3 模型更新与维护策略
随着时间推移,YOLOv8模型可能会需要更新,以适应新的数据分布或者业务需求。模型更新策略包括:
- 持续集成:将新数据不断纳入到训练集中,实现模型的持续更新。
- 自动化测试:在模型更新后进行自动化测试,确保更新没有引入新的问题。
- 版本控制:对模型版本进行管理,方便回滚和比较。
- 用户反馈:收集用户反馈,用于指导模型的进一步优化。
在这一过程中,可能会涉及到部署脚本的自动化和持续集成/持续部署(CI/CD)工具的使用,如Jenkins、GitLab CI等。
以下是使用`torchvision`模型转换工具的代码示例:
```python
import torch
from torchvision.models import resnet50
from torchvision.models.detection import fasterrcnn_resnet50_fpn
# 加载预训练模型
model = resnet50(pretrained=True)
# 将模型转换为推理模式
model.eval()
# 准备输入数据
x = torch.rand(1, 3, 224, 224)
# 模型转换为ONNX格式
torch.onnx.export(model, x, "model.onnx", opset_version=11)
# 分析模型结构
model = onnx.load("model.onnx")
onnx.checker.check_model(model)
```
```mermaid
graph LR
A[PyTorch模型] -->|导出| B(ONNX模型)
B -->|优化| C(TensorRT模型)
C -->|部署| D(推理平台)
```
通过上述代码块和流程图,我们可以看到模型从训练阶段到部署阶段的整个转换流程。在实际部署时,我们还需要对模型进行性能测试,确保部署后的模型能够在目标平台上达到预期的性能标准。
# 6. YOLOv8未来展望与发展
在计算机视觉领域,YOLOv8作为实时目标检测技术的最新进展,已经表现出卓越的性能和广泛的应用前景。然而,尽管取得了巨大成功,YOLOv8依然面临着一些局限性和挑战。本章将深入探讨YOLOv8的局限与挑战,并展望YOLO系列算法的未来方向,最后关注社区和研究动态的跟踪。
## 6.1 YOLOv8的局限与挑战
YOLOv8虽然在多数应用场景下表现优异,但它并非万能。深入了解YOLOv8当前版本的不足以及在行业应用中可能遇到的挑战,对于推动技术的发展至关重要。
### 6.1.1 当前版本的不足分析
YOLOv8尽管在速度和准确性上都取得了平衡,但仍有提升空间。例如,对于特定领域的极少数目标,YOLOv8可能还不能达到行业所需的检测精度。在极端光照条件下,如强烈的背光或逆光情况,YOLOv8的检测性能可能会受到影响。此外,YOLOv8可能在处理小目标和密集目标场景时,表现出一定程度的局限性,这些都是当前版本所面临的挑战。
### 6.1.2 行业应用中的潜在挑战
在不同的行业应用中,YOLOv8同样可能面临一些特定挑战。在人机交互系统中,YOLOv8需要处理更复杂的人体姿态识别和手势理解问题。而在视频监控系统中,YOLOv8需要能够适应各种不同分辨率和帧率的视频输入。在自动驾驶领域,YOLOv8不仅要快速准确地检测到交通标志和行人,还要在恶劣天气和复杂的城市交通场景中保持鲁棒性。
## 6.2 YOLO系列算法的未来方向
随着技术的不断进步,YOLO系列算法仍有很大的改进空间和发展前景。算法的改进和应用前景的展望,对于推动行业进步和解决实际问题具有重要意义。
### 6.2.1 算法改进的新思路
未来的YOLO算法改进可能集中在以下几个方面:
- **模型轻量化**:减少模型参数和计算量,使其更适合边缘计算设备和移动平台。
- **多模态融合**:结合视觉以外的其他传感器数据,如雷达和激光扫描(LiDAR),提高模型的鲁棒性和泛化能力。
- **自适应算法**:开发能够根据具体应用场景自动调整参数和模型结构的自适应算法。
- **无监督学习与半监督学习**:减少对大量标注数据的依赖,降低模型训练的成本。
### 6.2.2 应用前景的展望
YOLO系列算法的应用前景十分广阔。随着边缘计算和物联网技术的发展,YOLOv8有望在智能家居、智慧城市、远程医疗等领域发挥重要作用。在自动驾驶领域,YOLOv8的实时检测能力将直接影响车辆的反应速度和安全性。此外,YOLOv8在零售分析、安全监控、机器人导航等领域的应用前景也十分乐观。
## 6.3 社区与研究动态跟踪
开源社区是推动YOLOv8等算法持续发展的重要力量。与社区的互动和研究成果的共享对于学术和工业界的研究人员都至关重要。
### 6.3.1 开源社区的贡献与反馈
YOLO系列算法的成功在很大程度上归功于其活跃的开源社区。社区成员通过代码贡献、问题报告、使用反馈等方式,不断推动YOLO算法的改进和创新。通过定期访问YOLOv8的GitHub仓库,研究人员和技术人员可以跟踪最新动态,参与到项目的开发和讨论中。
### 6.3.2 持续学习与资源分享
由于深度学习和计算机视觉领域的快速发展,持续学习变得尤为重要。社区和研究机构经常组织研讨会、在线课程和工作坊等活动,使人们有机会获得最新的知识和技能。此外,大量的教程、论文和研究资料通过社区平台被共享,为个人和团队提供了宝贵的学习资源。
在本章中,我们探讨了YOLOv8所面临的局限性、挑战以及未来的发展方向,并强调了开源社区在算法创新和技术推广中的重要性。随着算法的不断完善和社区的不断成长,我们有理由相信YOLOv8将引领实时目标检测技术进入新的高度。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
YOLOv8训练宝典是一份全面指南,涵盖了YOLOv8模型训练的各个方面。从构建强大的训练集到优化训练效率,再到诊断和解决常见问题,本指南将引导您顺利完成训练过程。
此外,该指南还提供了有关边缘设备部署、模型压缩和实时对象检测的宝贵见解。它还涵盖了多目标检测和模型持久化等高级主题,帮助您掌握YOLOv8的全部潜力。
无论您是初学者还是经验丰富的从业者,YOLOv8训练宝典都是一份必备资源,可帮助您构建和部署准确且高效的YOLOv8模型。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
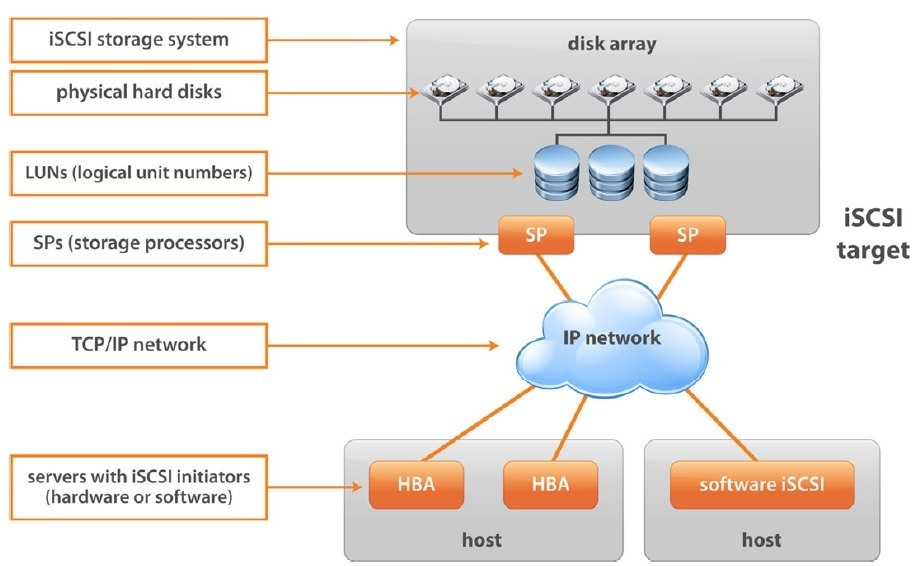
【性能调优秘笈】:Windows Server 2008 R2 iSCSI性能突破关键设置
# 摘要
本文针对iSCSI技术及其性能优化进行详细探讨,同时分析Windows Server 2008 R2网络配置的优化策略和iSCSI存储连接的性能提升方法。文章首先介绍了iSCSI的基本概念和影响性能的关键因素,随后深入探讨了网络适配器绑定、负载均衡
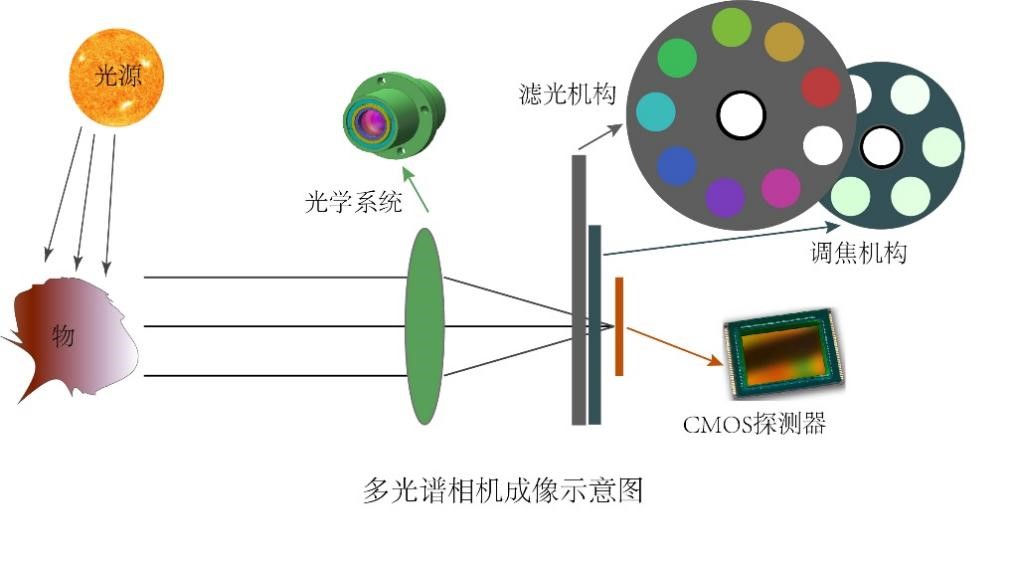
机器视觉系统中的线阵相机:关键角色与深远影响分析
# 摘要
机器视觉在现代自动化和智能制造领域中扮演着核心角色,其中线阵相机作为一种重要的视觉检测设备,具有独特的优势和广泛应用前景。本文首先介绍了机器视觉与线阵相机的基本概念和工作原理,探讨了其关键技术指标、接口与数据传输方式。随后,深入分析了线阵相机在表面检测、条码识别、精密测量等领域的应用,并讨论了在应用中遇到的技术挑战和未来创新方向。文章最后通过实践案例展示了线阵相机在不同工业场景下的应用效果,
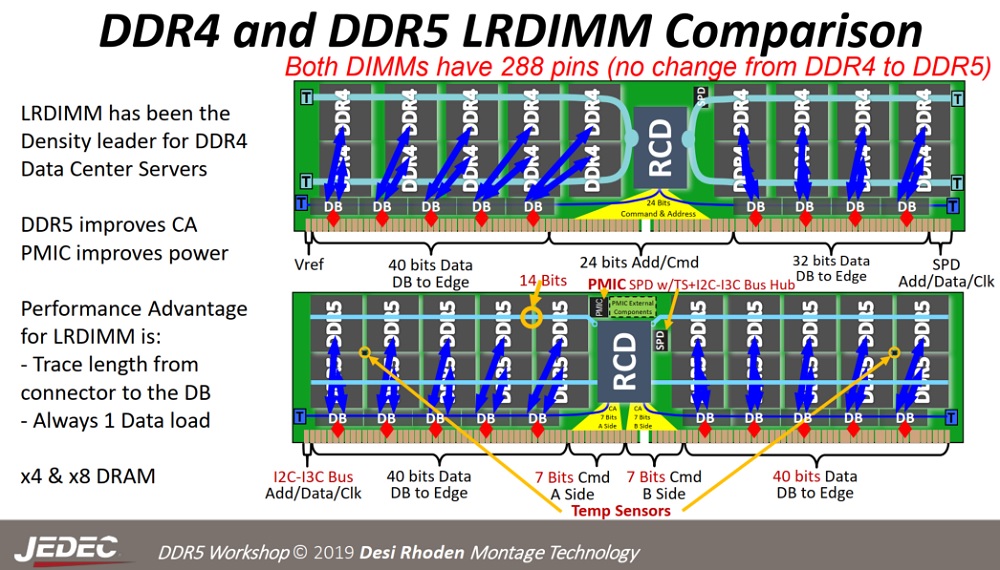
LPDDR5电源管理优化指南:基于JEDEC JESD209-5B标准的节能策略
# 摘要
本文综述了LPDDR5内存技术及其电源管理策略。首先对LPDDR5内存技术进行全面概览,然后详解了JEDEC JESD209-5B标准,强调了其电源管理要求和与其他LPDDR标准的对比。在理论基础部分,深入探讨了电源管理的理论模型和节能策略。实践应用章节详细描述了优化配置步骤、案例分析以及测试与验证方法。随
【存储性能优化】:基于SAM-5模型的存储系统优化秘籍

# 摘要
随着信息技术的飞速发展,存储性能优化成为提升系统效率的关键。本文首先介绍了存储性能优化的基础知识,然后深入解析了SAM-5模型,并讨论了其核心组件与性能指标。通过理论分析,我们识别了性能瓶颈并制定了调优策略,强调了理论与实践结合的重要性。文章进一步通过存储系统的实践案例,展示了硬件和软件优化的实际成效,以及综合优化策略如何助力业务增长。在高级应用部分,探讨了SAM-5模型在云存储
【iOS数据持久化:沙盒环境的本地存储解决方案】

# 摘要
本文针对iOS平台数据持久化技术进行了全面概述,从基础的数据存储环境和方法到高级的数据库操作与优化策略,详细介绍了iOS系统中数据持久化的关键概念、技术和应用场景。通过
【故障排除专家】:vcsmx_ucli.pdf问题快速解决策略
# 摘要
本文全面探讨了vcsmx_ucli.pdf文件在系统运行中所扮演的角色、潜在问题及其解决方案。通过对文件结构进行解析,阐述了文件头部信息、数据区块和索引机制的工作原理及其重要性。文章详细介绍了vcsmx_ucli.pdf文件错误类型、系统日志分析,以及修复和恢复策略,包括手动和自动化工具的应用。同时,强调了文
电磁兼容性在偶校验电路设计中的考量:专业指南

# 摘要
随着电子设备的普及和高速信号处理的需求增长,电磁兼容性(EMC)成为了电子工程设计中的关键因素之一。本文首先概述了电磁兼容性的基本概念,然后介绍了偶校验电路设计的
【EtherCAT同步技术全解析】:深入挖掘工业自动化中的性能优化
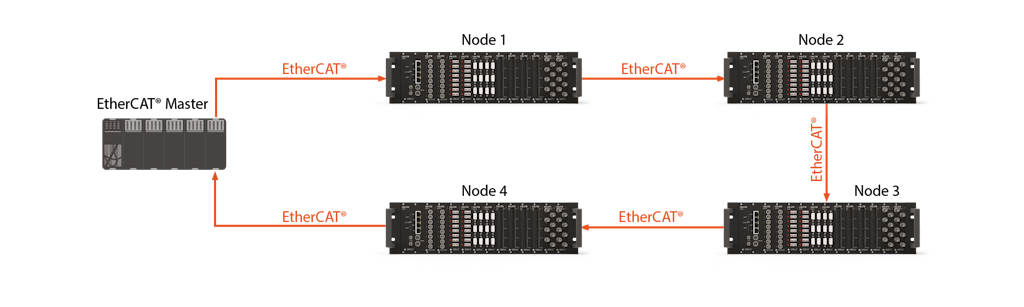
# 摘要
本文全面综述了EtherCAT同步技术及其在工业自动化领域的应用。首先介绍了EtherCAT技术的理论基础,涵盖工业以太网和EtherCAT协议的工作原理,同步机制和网络拓扑结构。接着深入探讨了技术的实现细节,包括主站和从站的通信、同步过程以及配置和故障排除方法。文章还着重分析了性能优化方面,涉及系统时延分
【安全运维自动化】:网神SecVSS 3600的自动化秘诀,提高你的安全运维效率
# 摘要
随着信息技术的飞速发展,安全运维自动化已成为保障企业网络安全的重要手段。本文从安全运维自动化的基础与意义出发,详细介绍了网神SecVSS 3600平台的架构、核心
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )