多轴控制关键技术:深入学习PMAC中文手册
发布时间: 2024-12-17 08:09:18 订阅数: 3 

PMAC多轴运动控制卡学习(硬件).pdf

参考资源链接:[PMAC中文手册详解:接口、设置与工具指南](https://wenku.csdn.net/doc/3cgo1obz2q?spm=1055.2635.3001.10343)
# 1. 多轴控制技术概述
## 1.1 多轴控制技术的定义与作用
多轴控制技术是指同时控制多个轴向运动的技术,广泛应用于高精度、高复杂度的工业自动化领域,如机器人臂、数控机床和装配线。该技术能够实现精确同步和复杂路径的运动控制,是现代制造业中的核心技术之一。
## 1.2 多轴控制技术的关键要素
多轴控制技术的成功实施依赖于控制算法、驱动器、传感器和执行机构的精确协同工作。此外,实时监控和精确反馈也是确保控制系统高效运行的关键。
## 1.3 多轴控制的应用领域
多轴控制技术在许多领域都有应用,例如航空航天、汽车制造、电子制造、精密工程等,它能够为不同需求提供定制化解决方案。
通过本章节,读者应掌握多轴控制技术的基本概念,理解其在工业自动化中的作用,以及它如何适应不同行业的应用需求。接下来的章节将会详细分析PMAC控制卡在这一技术中的应用和优势。
# 2. PMAC控制卡基础
## 2.1 PMAC硬件架构
### 2.1.1 PMAC控制卡的主要功能
PMAC控制卡是一种高性能的多轴运动控制器,它提供了丰富的功能,包括但不限于实时多任务处理、高精度运动控制、直线和圆弧插补、电子齿轮、电子凸轮等功能。PMAC控制卡的实时操作系统能够处理复杂的运动算法,保证了运动控制的高精度和高稳定性。
PMAC控制卡通过其高速处理能力,可以同时管理多个伺服轴,并实时处理复杂的运动任务。它支持多轴同步和协调运动,这对于需要精密运动控制的应用场景至关重要。例如,在电子制造、半导体设备、医疗设备和机器人技术等领域,PMAC控制卡能够通过其丰富的功能支持实现高精度的路径规划和运动控制。
### 2.1.2 PMAC与其他控制卡的比较
与其他常见的控制卡相比,PMAC控制卡在多轴控制和实时性能方面具有明显的优势。例如,与基于PC的运动控制器相比,PMAC控制卡通常提供了更高的可靠性和更低的延迟。此外,PMAC控制卡通常集成了更多的功能,减少了对外部硬件和软件的依赖,从而简化了系统的整体设计。
PMAC控制卡的编程灵活性也是其一大优势。它支持多种编程语言,包括C、C++、Basic、Pascal等,还支持直观的宏语言进行快速开发。与此同时,与PLC(可编程逻辑控制器)相比,PMAC控制卡在处理复杂的运动控制任务上,提供了更为强大的功能和更高的处理速度。
## 2.2 PMAC软件安装与配置
### 2.2.1 PMAC软件环境搭建
为了充分利用PMAC控制卡的功能,需要为其安装和配置适当的软件环境。PMAC控制卡的软件安装包括软件安装包的下载、安装以及驱动程序的安装等步骤。首先,需要从厂商官方网站下载最新的软件安装包,然后按照安装向导进行安装。
在软件安装过程中,需要特别注意系统兼容性和硬件要求。例如,PMAC控制卡可能会要求安装特定版本的操作系统或者特定型号的处理器。安装完成后,需要根据控制卡型号和应用场景安装相应的驱动程序。这些驱动程序通常包括与外部设备通信所需的接口驱动和协议支持。
### 2.2.2 PMAC软件配置详解
软件配置是确保PMAC控制卡正常工作的关键步骤。配置过程涉及到多个方面,包括通信设置、轴参数配置、运动参数设定等。通信设置主要指的是控制卡与计算机或其他外围设备之间的通信协议和参数配置,如串行通信的波特率和数据位设置。
轴参数配置则是PMAC控制卡配置中的重要部分。每个轴的参数需要根据实际的应用需求进行设置,包括但不限于位置反馈、速度、加速度和减速度等。这些参数决定了控制卡如何控制伺服电机的运动,直接影响运动的精度和速度。
运动参数设定包括了运动控制策略的配置,如点位运动、连续运动和同步运动的参数设定。这些参数的设定需要根据实际的应用场景和机械特性来进行,以实现最佳的运动控制效果。
## 2.3 PMAC编程基础
### 2.3.1 PMAC编程语言概述
PMAC控制卡支持多种编程语言,但其主要编程语言为Delta Tau公司开发的专有语言——PMAC命令语言。该语言是一种面向运动控制的语言,它集成了丰富的控制命令,允许开发者直接控制硬件,同时也能进行复杂的计算和逻辑判断。
PMAC命令语言的特点是其对运动控制的原生支持,它提供了大量的运动控制相关的命令,例如位置移动指令、速度控制指令、加速度控制指令等。这些命令使得开发人员可以方便地创建精确的运动控制程序。
除此之外,PMAC控制卡还支持包括C/C++在内的多种通用编程语言。通过这些语言,开发人员可以编写更复杂的控制逻辑,实现更高级的功能,如数据处理、用户界面交互和网络通信等。
### 2.3.2 基本运动控制命令的使用
PMAC控制卡中的基本运动控制命令可以简单地分为点位运动和连续运动两大类。点位运动命令,如`JOG`和`MoveAbsolute`,用于控制轴移动到特定的位置点。而连续运动命令,如`MoveContinuous`,用于控制轴进行连续运动,比如在流水线操作中的连续输送。
使用运动命令时,开发者需要指定运动参数,如目标位置、速度、加速度等。例如,一个简单的点位移动命令可以如下所示:
```pmac
MoveAbsolute #1, 1000, 5000;
```
这条命令指示第一个轴移动到位置1000,速度设为5000单位/秒。其中`#1`代表轴号,`1000`代表目标位置,`5000`代表速度。
在实际应用中,开发者需要根据具体的机械特性和应用需求来调整这些参数。为了达到更精确的控制效果,PMAC控制卡支持使用参数来细化运动命令,如使用`P`来指定加速度和减速度,使用`F`来指定进给率等。
```pmac
MoveAbsolute #1, 1000, 5000, P=10000, F=2500;
```
此命令将同一运动参数进行扩展,其中`P=10000`定义了加速度和减速度为10000单位/秒²,`F=2500`定义了进给率为2500单位/秒。通过这样的参数设置,可以实现更加精细和平滑的运动控制。
# 3. 多轴同步与运动控制
在多轴控制系统中,多轴同步是实现复杂运动的关键技术之

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 PMAC 中文手册专栏,您的项目管理和运动控制指南。我们的深入文章系列将帮助您掌握关键概念、实用技巧和高级功能。从系统设置到故障诊断,再到多轴控制和实时系统集成,我们为您提供全面的指南。通过探索编程接口、硬件接口和运动控制策略,您将获得所需的知识,以优化您的系统性能并解决复杂问题。无论您是刚开始使用 PMAC 还是经验丰富的用户,我们的专栏都将为您提供宝贵的见解和实用的解决方案。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Qt环境搭建终极指南】:5分钟内解决Qt Creator版本检测噩梦
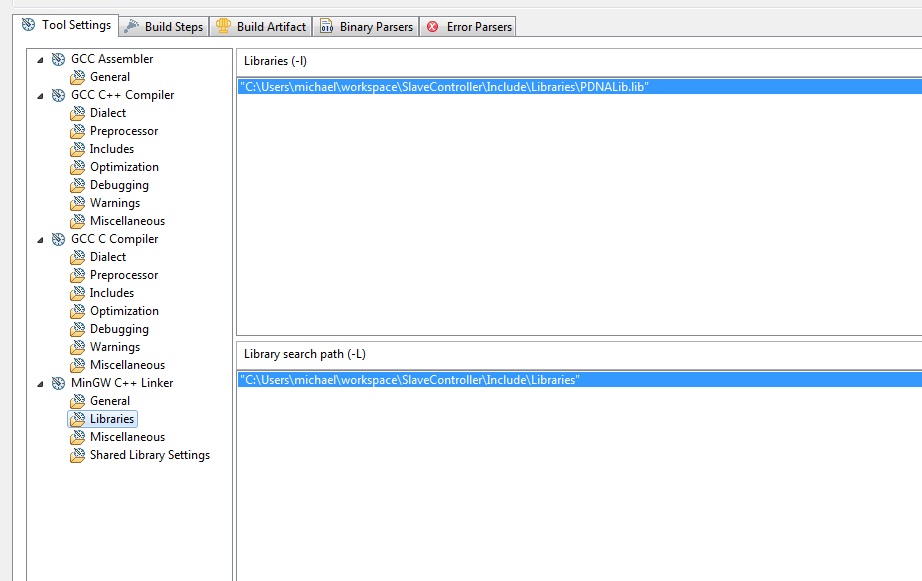
参考资源链接:[解决qt-creator创建工程说“没有有效的qt版本问题”](https://wenku.csdn.net/doc/6412b6f3be7fbd1778d48903?spm=1055.2635.3001.10343)
# 1. Qt环境搭建快速入门
## 开启Qt旅程:基础搭建
在开始我们的Qt编程之旅前,了解并安装一个适合的开发环境是必要的。本章会引导你通过几个简单的步骤快速搭建起Qt的
网络数据分析:综合实验中的数据驱动方法:数据分析师必备技能

参考资源链接:[通达学院:网络前沿SSH实验——远程管理路由器](https://wenku.csdn.net/doc/1w5jjs3s54?spm=1055.2635.3001.10343)
# 1. 网络数据分析概述
## 1.1 网络数据分析的重要性
在当今这个数据爆炸的时代,网络数据分析不仅对企业的市场战略和运营决策起到了关键作用,而且对网络安全和流量管理等领域也有着不可替代的重要性。有效的网络数据分析可以帮助企业发现潜在的市场
【高效优化】ST-FOC4.2电机控制:中文社区分享的调整秘诀

参考资源链接:[STM32PMSM FOC SDK V4.2全中文详解:高性能电机驱动与API应用](https
【FreeRTOS监控与可视化】:Tracealyzer实时数据监控技巧
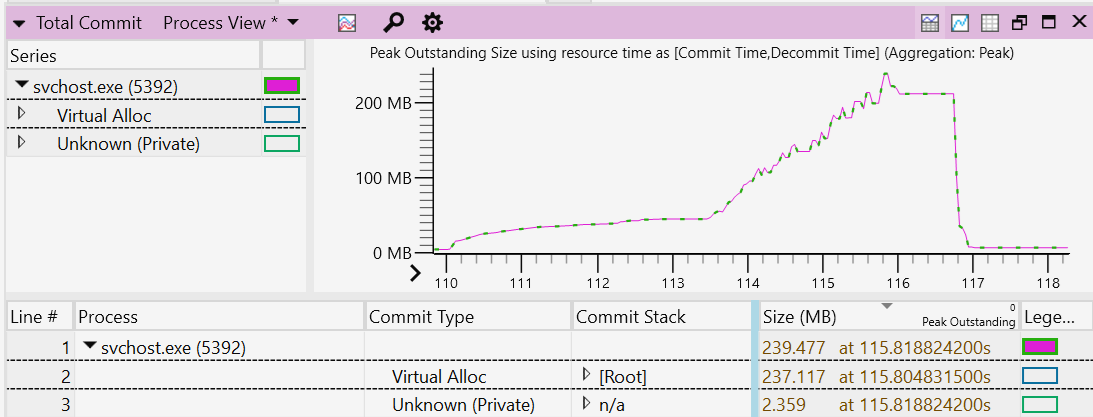
参考资源链接:[Tracealyzer配置指南:FreeRTOS实时分析与调试](https://wenku.csdn.net/doc/6412b547be7fbd1778d4293d?spm=1055.2635.3001.10343)
# 1. FreeRTOS监控与可视化的基础概念
在现代嵌入式系统的开发与维
C语言内存分配全解析:malloc、calloc、realloc和free的精准用法
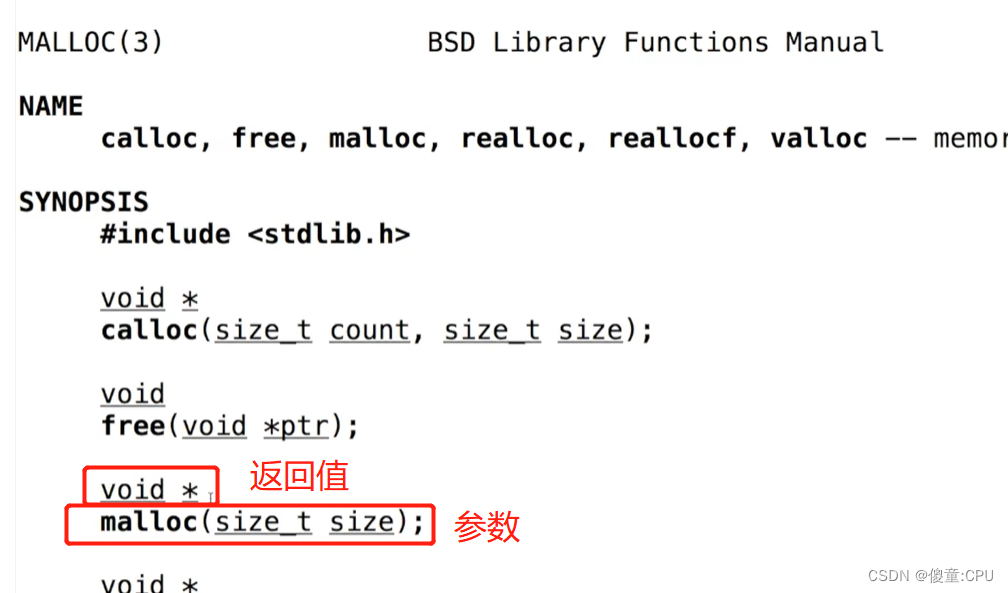
参考资源链接:[C语言入门资源:清晰PDF版,亲测可用](https://wenku.csdn.net/doc/6412b6d0be7fbd1778d48122?spm=1055.2635.3001.10343)
# 1. C语言内存管理基础
在计算机科学中,内存管理是软件开发的核心组成部分之一,特别是在系统编程语言如C语言中。正确理解并有效管理内存是编写高效、稳定且安
【动态规划速成课】:从算法导论到实战,一步到位
参考资源链接:[《算法导论》中文版各章习题答案汇总](https://wenku.csdn.net/doc/3rfigz4s5s?spm=1055.2635.3001.10343)
# 1. 动态规划的核心概念和算法原理
动态规划是计算机科学中一种解决问题的方法论,特别是在优化问题和决策过程中非常有用。动态规划的核心在于将一个复杂问题分解为更小的子问题,并通过解决子问题来构
VBS与IE的协同工作:自动化测试与网页导航的终极结合!

参考资源链接:[VBScript中开启IE的两种方法:Application与WScript.Shell示例](https://wenku.csdn.net/doc/64533e54ea0840391e778de9?spm=1055.2635.3001.10343)
# 1. VBS与IE协同工作简介
在当前的软件开发和测试环境中,自动化测试已成为提高效率和质量的关
HTML学习宝典:利用MDN从入门到精通
参考资源链接:[MDN离线文档:中文API镜像及注意事项](https://wenku.csdn.net/doc/68x0ofhfub?spm=1055.2635.3001.10343)
# 1. HTML基础与结构
HTML(HyperText Markup Language)是构建网页的基础。任何网站都离不开HTML,它通过使用各种标记(tags)来定义网页上的内容和结构。本章将介绍HTML的基
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )