YOLO车辆检测数据集评估:度量标准和最佳实践,助你打造高效模型
发布时间: 2024-08-16 14:52:29 阅读量: 45 订阅数: 49 
# 1. YOLO车辆检测数据集评估**
YOLO(You Only Look Once)是一种实时目标检测算法,在车辆检测领域得到了广泛应用。对YOLO模型的评估至关重要,因为它有助于确定模型的性能并指导进一步的优化。本文将探讨评估YOLO车辆检测数据集的最佳实践,包括数据集划分、度量标准和评估工具。
# 2. 车辆检测度量标准
### 2.1 精度和召回率
在车辆检测中,精度和召回率是衡量模型性能的关键指标。
* **精度**:预测为正例的样本中,真实为正例的比例。
* **召回率**:真实为正例的样本中,预测为正例的比例。
精度和召回率之间存在权衡关系。提高精度通常会导致召回率下降,反之亦然。
### 2.2 均值平均精度(mAP)
均值平均精度(mAP)是车辆检测中广泛使用的综合度量标准。它衡量模型在不同置信度阈值下的平均精度。
mAP 的计算步骤如下:
1. 对于每个置信度阈值,计算精度和召回率。
2. 计算每个置信度阈值下的平均精度(AP)。
3. 将所有置信度阈值下的 AP 求平均,得到 mAP。
### 2.3 交并比(IoU)阈值
交并比(IoU)是衡量检测框与真实框重叠程度的指标。它定义为检测框与真实框的交集面积与并集面积之比。
在车辆检测中,IoU 阈值用于确定检测是否为真阳性。通常,IoU 阈值设置为 0.5,这意味着检测框与真实框至少重叠 50%。
```python
import numpy as np
def calculate_iou(pred_box, gt_box):
"""计算检测框和真实框的交并比。
参数:
pred_box (list): 检测框的坐标 [x1, y1, x2, y2]
gt_box (list): 真实框的坐标 [x1, y1, x2, y2]
返回:
float: 交并比
"""
# 计算交集面积
inter_x1 = max(pred_box[0], gt_box[0])
inter_y1 = max(pred_box[1], gt_box[1])
inter_x2 = min(pred_box[2], gt_box[2])
inter_y2 = min(pred_box[3], gt_box[3])
inter_area = max(0, inter_x2 - inter_x1) * max(0, inter_y2 - inter_y1)
# 计算并集面积
pred_area = (pred_box[2] - pred_box[0]) * (pred_box[3] - pred_box[1])
gt_area = (gt_box[2] - gt_box[0]) * (gt_box[3] - gt_box[1])
union_area = pred_area + gt_area - inter_area
# 计算交并比
iou = inter_area / union_area
return iou
```
# 3.1 数据集划分和预处理
数据集划分是YOLO数据集评估的关键步骤,它决定了训练集和验证集的质量,进而影响模型的性能评估。理想情况下,训练集和验证集应该具有相似的分布,以确保模型在评估过程中不会出现过拟合或欠拟合。
**数据集划分策略**
常用的数据集划分策略包括:
- **随机划分:**将数据集随机分成训练集和验证集,比例一般为80%:20%。这种方法简单易行,但可能导致训练集和验证集的分布不均匀。
- **分层划分:**根据数据集中不同类别的分布,将数据分成多个子集,然后从每个子集中随机抽取数据组成训练集和验证集。这种方法可以确保训练集和验证集在类别分布上保持一致。
- **交叉验证:**将数据集分成多个子集,每次使用一个子集作为验证集,其余子集作为训练集。这种方法可以更全面地评估模型的性能,但计算量较大。
**数据预处理**
在数据集划分之后,还需要对数据进行预处理,以提高模型的训练和评估效率。常用的数据预处理技术包括:
- **数据增强:**通过旋转、翻转、裁剪等操作,增加数据集的样本数量和多样性。
- **归一化:**将数据缩放到0到1之间,以消除不同特征之间的尺度差异。
- **标准化:**将数据减去均值并除以标准差,以消除不同特征之间的分布差异。
### 3.2 训练和验证集的平衡
训练集和验证集的平衡对于YOLO模型评估至关重要。如果训练集和验证集的类别分布不一致,可能会导致模型在评估过程中出现偏差。
**类别平衡**
为了确保类别平衡,可以采用以下方法:
- **过采样:**对于样本数量较少的类别,通过复制或合成数据样本进行过采样,以增加其在训练集中的比例。
- **欠采样:**对于样本数量较多的类别,通过随机删除数据样本进行欠采样,以减少其在训练集中的比例。
- **加权采样:**为不同类别的样本分配不同的权重,以平衡其在训练过程中的影响。
**样本平衡**
除了类别平衡之外,还需要考虑样本平衡。如果训练集和验证集中正负样本的比例不一致,可能会导致模型在评估过程中出现偏差。
**正负样本平衡**
为了确保正负样本平衡,可以采用以下方法:
- **调整训练参数:**调整模型的损失函数或优化算法,以增加对正样本的惩罚或减少对负样本的惩罚。
- **使用难例挖掘:**识别和收集训练集中较难分类的样本,并将其分配到一个单独的集合中,以进行额外的训练。
- **使用数据生成器:**生成合成数据样本,以增加正样本或负样本的数量。
### 3.3 模型超参数的优化
YOLO模型的超参数,如学习率、批大小、训练轮数等,对模型的性能评估有显著影响。因此,需要对超参数进行优化,以找到最优的模型配置。
**超参数优化方法**
常用的超参数优化方法包括:
- **网格搜索:**遍历超参数的候选值,并评估每个候选值的性能。这种方法简单易行,但计算量较大。
- **贝叶斯优化:**使用贝叶斯统计模型指导超参数搜索,以更有效地找到最优值。
- **强化学习:**使用强化学习算法,通过与环境交互来优化超参数。
**超参数优化指标**
在超参数优化过程中,需要选择合适的指标来评估模型的性能。常用的指标包括:
- **验证集精度:**模型在验证集上的准确率。
- **验证集损失:**模型在验证集上的损失函数值。
- **mAP:**模型在验证集上的均值平均精度。
# 4. YOLO模型评估工具和指标
### 4.1 VOC评估工具
VOC(Pascal视觉对象类别)评估工具是用于评估目标检测模型的常用工具,它由PASCAL VOC竞赛组织开发。VOC评估工具使用平均精度(AP)作为评估指标,AP是基于不同IoU阈值下的精度和召回率计算的。
### 4.2 COCO评估工具
COCO(COCO目标检测、分割和关键点数据集)评估工具是另一个广泛用于评估目标检测模型的工具。COCO评估工具使用平均精度(AP)和平均召回率(AR)作为评估指标,这些指标是在不同IoU阈值和对象大小下的精度和召回率的平均值。
### 4.3 常见的评估指标
在评估YOLO模型时,可以使用以下常见的评估指标:
- **平均精度(AP):**AP是基于不同IoU阈值下的精度和召回率计算的,它表示模型在所有阈值下检测正确目标的平均能力。
- **平均召回率(AR):**AR是基于不同IoU阈值下的精度和召回率计算的,它表示模型在所有阈值下检测到所有真实目标的平均能力。
- **mAP:**mAP是所有类别的AP的平均值,它提供了一个模型在所有类别的总体检测性能的度量。
- **IoU阈值:**IoU阈值是用于确定预测框和真实框之间的重叠程度的阈值。通常使用0.5作为IoU阈值,但也可以根据具体任务进行调整。
### 4.4 代码示例
以下Python代码示例展示了如何使用VOC评估工具评估YOLO模型:
```python
import os
import xml.etree.ElementTree as ET
import numpy as np
def voc_eval(detpath,
annopath,
imagesetfile,
classname,
cachedir,
ovthresh=0.5):
"""
VOC evaluation function.
Args:
detpath: Path to VOC results files.
annopath: Path to VOC annotation files.
imagesetfile: Path to the VOC image set file.
classname: Name of the class to evaluate.
cachedir: Path to a directory for storing cache files.
ovthresh: Overlap threshold for positive detections.
"""
# Read image set file
with open(imagesetfile, "r") as f:
lines = f.readlines()
image_ids = [line.strip() for line in lines]
# Read annotation files
annotations = {}
for image_id in image_ids:
annotation_file = os.path.join(annopath, image_id + ".xml")
tree = ET.parse(annotation_file)
root = tree.getroot()
objects = root.findall("object")
for obj in objects:
class_name = obj.find("name").text
if class_name == classname:
bbox = obj.find("bndbox")
x1 = float(bbox.find("xmin").text)
y1 = float(bbox.find("ymin").text)
x2 = float(bbox.find("xmax").text)
y2 = float(bbox.find("ymax").text)
annotations[image_id] = [x1, y1, x2, y2]
# Read detection results
detections = {}
for image_id in image_ids:
detection_file = os.path.join(detpath, image_id + ".txt")
with open(detection_file, "r") as f:
lines = f.readlines()
for line in lines:
line = line.strip()
class_name, score, x1, y1, x2, y2 = line.split(" ")
if class_name == classname:
detections[image_id] = [float(score), float(x1), float(y1), float(x2), float(y2)]
# Calculate AP
ap = calc_ap(annotations, detections, ovthresh)
return ap
```
**代码逻辑分析:**
该代码实现了一个VOC评估函数,它读取VOC结果文件、注释文件和图像集文件,然后计算给定类的平均精度(AP)。
**参数说明:**
- `detpath`:VOC结果文件的路径。
- `annopath`:VOC注释文件的路径。
- `imagesetfile`:VOC图像集文件的路径。
- `classname`:要评估的类的名称。
- `cachedir`:用于存储缓存文件的目录的路径。
- `ovthresh`:用于确定预测框和真实框之间重叠程度的重叠阈值。
# 5. YOLO模型评估中的挑战和解决方案**
**5.1 小目标检测的挑战**
小目标检测是YOLO模型评估中面临的一个主要挑战。由于小目标在图像中所占像素较少,模型可能难以准确地定位和识别它们。这会导致召回率下降和漏检率增加。
**5.2 遮挡和背景杂波的影响**
遮挡和背景杂波会对YOLO模型的评估产生负面影响。遮挡会阻止模型看到目标的完整形状,而背景杂波会引入噪声和干扰,使模型难以区分目标和背景。
**5.3 提升模型评估准确性的策略**
为了提升YOLO模型评估的准确性,可以采取以下策略:
- **使用多尺度训练和测试:**多尺度训练可以帮助模型学习检测不同大小的目标。在测试时,使用不同大小的图像可以提高小目标的检测率。
- **采用特征金字塔网络(FPN):**FPN可以提取不同尺度的特征,从而增强模型对小目标的检测能力。
- **使用注意力机制:**注意力机制可以引导模型关注图像中重要的区域,从而提高小目标的检测精度。
- **应用数据增强技术:**数据增强技术,如随机裁剪、旋转和翻转,可以增加训练数据的多样性,提高模型的鲁棒性。
- **优化IoU阈值:**IoU阈值决定了模型将预测框标记为真阳性的最小重叠率。优化IoU阈值可以平衡精度和召回率。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 YOLO 车辆检测数据集的方方面面,旨在帮助研究人员和从业者打造高效、鲁棒的车辆检测模型。从评估度量标准到数据增强技巧,从数据标注最佳实践到数据挖掘技术,专栏涵盖了数据管理和模型开发的各个方面。此外,专栏还探讨了道德考量、开源资源、商业应用、数据隐私、分布式处理、云计算、边缘计算、实时处理、迁移学习、持续集成和部署以及版本控制等主题,为读者提供了全面且实用的指南,助力他们充分利用 YOLO 车辆检测数据集。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
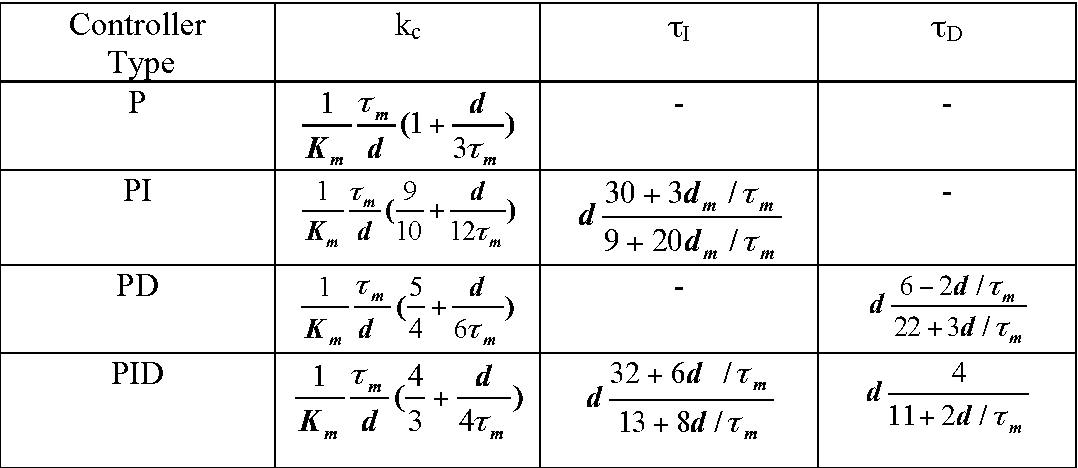
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
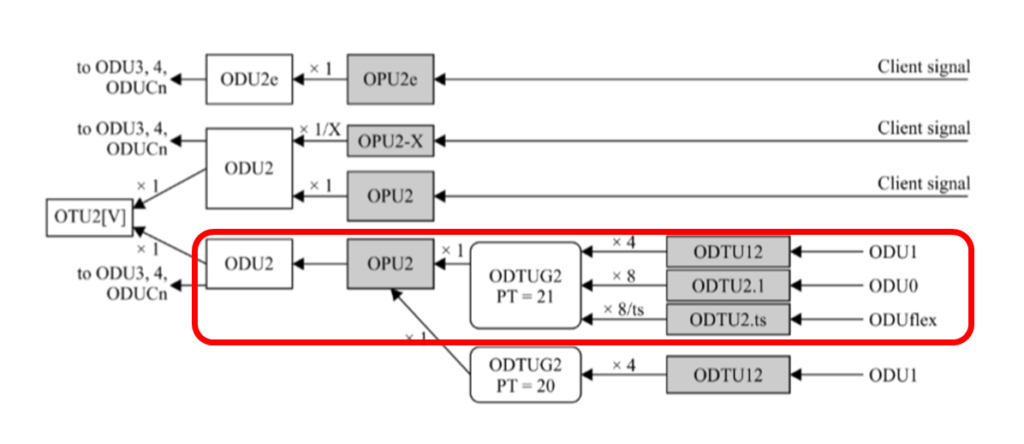
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
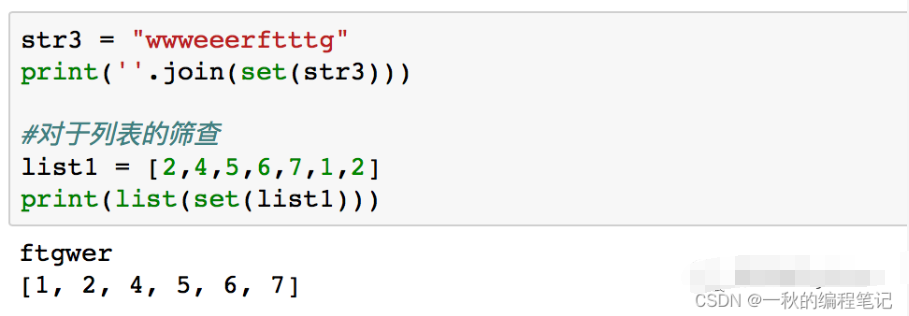
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )