【STM32单片机入门指南】:从零基础到实战应用的完整攻略
发布时间: 2024-07-05 01:23:25 阅读量: 253 订阅数: 61 

WindowsQwen2.5VL环境搭建-执行脚本
# 1. STM32单片机基础**
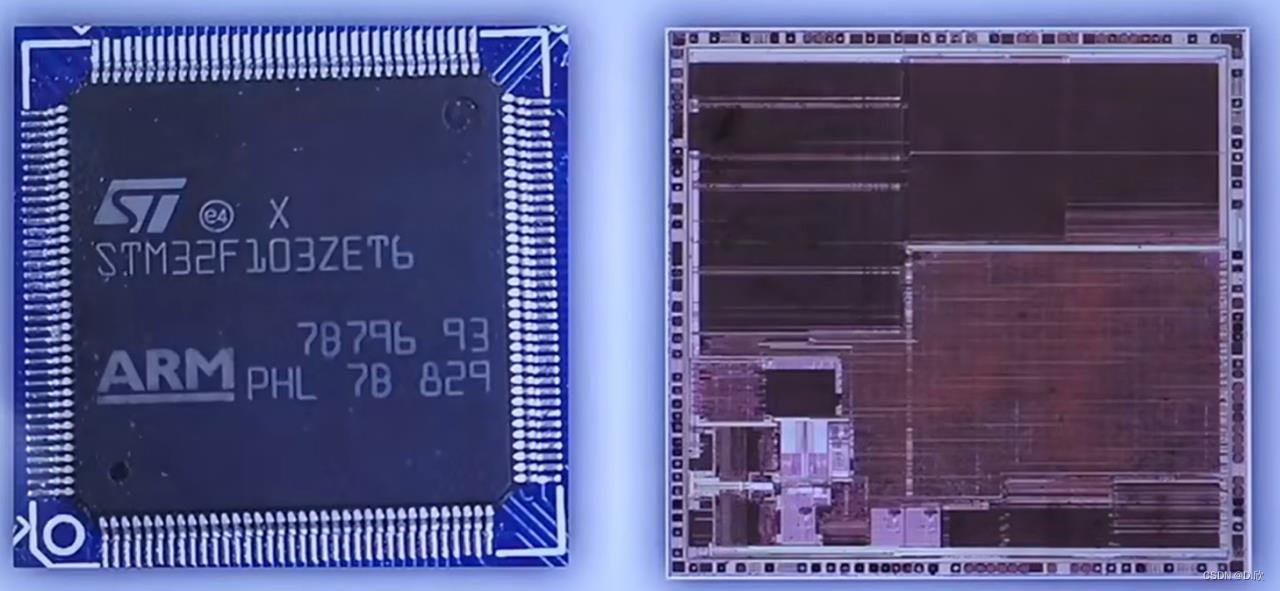
STM32单片机是意法半导体(STMicroelectronics)推出的一系列基于ARM Cortex-M内核的高性能微控制器。它们以其出色的性能、低功耗和丰富的外设而闻名,广泛应用于工业控制、物联网、医疗设备等领域。
STM32单片机的核心是ARM Cortex-M内核,它具有高效的指令集和强大的处理能力。该内核有多种型号,如M0、M3、M4和M7,每种型号都针对不同的性能和功耗要求进行了优化。
STM32单片机还集成了丰富的片上外设,包括GPIO、定时器、中断控制器、ADC、DAC和通信接口等。这些外设提供了灵活的连接和控制选项,使STM32单片机能够轻松与各种传感器、执行器和通信设备连接。
# 2. STM32单片机编程环境搭建
### 2.1 IDE的选择和安装
**IDE的选择**
STM32单片机编程环境搭建的第一步是选择一个合适的集成开发环境(IDE)。常用的IDE有:
- **Keil MDK-ARM**:经典的STM32开发环境,功能强大,但需要付费。
- **IAR Embedded Workbench**:功能全面,支持多种编译器,但价格昂贵。
- **Eclipse with STM32CubeIDE**:开源免费,基于Eclipse平台,集成STM32CubeMX工具。
- **Visual Studio Code with PlatformIO**:轻量级IDE,支持多种编程语言和开发板。
**IDE的安装**
选择好IDE后,按照官方文档进行安装。一般来说,安装过程比较简单,只需按照提示操作即可。
### 2.2 开发环境的配置
**工程创建**
安装好IDE后,需要创建一个新的工程。工程是代码、资源和配置的集合。
**代码编写**
在工程中,用户可以编写C语言代码。STM32单片机使用标准C语言,但有一些特定的库函数和宏。
**编译和链接**
编写好代码后,需要进行编译和链接。编译将源代码转换为汇编代码,链接将汇编代码链接成可执行文件。
**下载和调试**
编译和链接完成后,可将可执行文件下载到STM32单片机中。调试工具可以帮助用户调试代码,找出错误。
### 2.3 调试工具的使用
**仿真器**
仿真器是一种硬件工具,可以实时模拟STM32单片机的运行。仿真器可以帮助用户在代码执行过程中查看寄存器值、内存内容和执行流程。
**调试器**
调试器是一种软件工具,可以与仿真器或目标板连接。调试器可以设置断点、单步执行代码,并查看变量值。
**代码逻辑分析**
```c
// 初始化GPIOA的第5位为输出模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 设置GPIOA的第5位为高电平
GPIO_SetBits(GPIOA, GPIO_Pin_5);
// 延时1秒
Delay(1000);
// 设置GPIOA的第5位为低电平
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
```
**参数说明**
- `GPIO_InitTypeDef`:GPIO初始化结构体
- `GPIO_Pin`:要初始化的GPIO引脚
- `GPIO_Mode`:GPIO模式(输入、输出、复用等)
- `GPIO_Speed`:GPIO速度(低速、中速、高速)
- `GPIO_Init()`:GPIO初始化函数
- `GPIO_SetBits()`:设置GPIO引脚为高电平
- `Delay()`:延时函数
- `GPIO_ResetBits()`:设置GPIO引脚为低电平
**逻辑分析**
这段代码初始化GPIOA的第5位为输出模式,并将其设置为高电平。然后延时1秒,再将其设置为低电平。
# 3. STM32单片机硬件架构
### 3.1 处理器内核和外设
STM32单片机采用ARM Cortex-M系列处理器内核,该内核具有高性能、低功耗和丰富的指令集等特点。STM32单片机的外设资源丰富,包括GPIO、定时器、中断、ADC、DAC、通信接口等。
### 3.2 GPIO、定时器和中断
**GPIO(通用输入/输出)**
* 提供数字输入/输出功能
* 可配置为推挽输出、开漏输出、上拉输入、下拉输入等模式
* 每个GPIO引脚都可以独立配置
**定时器**
* 提供定时、计数、脉宽调制等功能
* 具有多种定时器模式,如向上计数、向下计数、捕获比较等
* 可用于生成PWM信号、测量时间间隔等
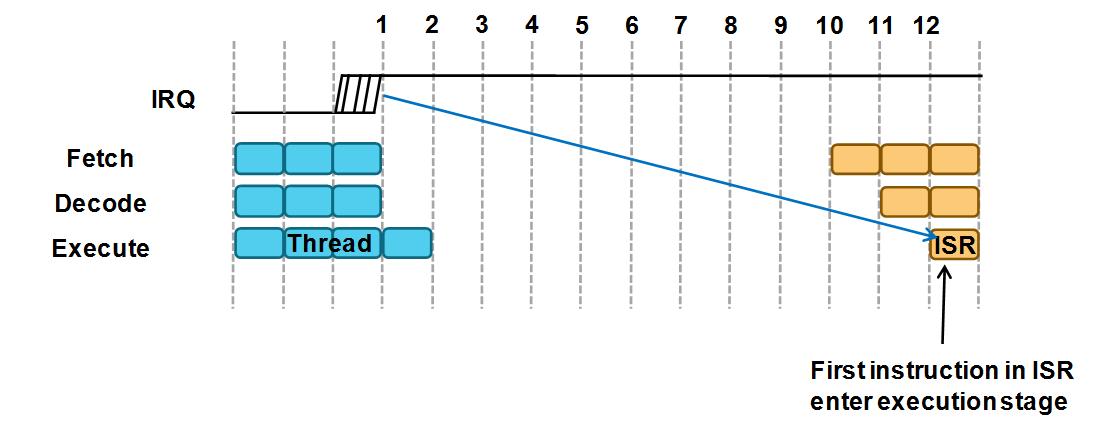
**中断**
* 当发生特定事件时触发中断
* 中断可以分为外部中断和内部中断
* 外部中断由外部事件触发,如GPIO引脚电平变化
* 内部中断由内部事件触发,如定时器溢出
### 3.3 ADC、DAC和通信接口
**ADC(模数转换器)**
* 将模拟信号转换为数字信号
* 具有多种分辨率和采样速率
* 可用于测量电压、电流、温度等模拟量
**DAC(数模转换器)**
* 将数字信号转换为模拟信号
* 具有多种分辨率和输出电压范围
* 可用于产生模拟波形、控制电机等
**通信接口**
* 提供与外部设备通信的功能
* 包括UART、SPI、I2C、CAN等通信接口
* 可用于与传感器、显示器、存储器等设备通信
#### 代码示例:GPIO配置
```c
/* 配置GPIOA的第5个引脚为推挽输出模式 */
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN; // 使能GPIOA时钟
GPIOA->MODER &= ~GPIO_MODER_MODE5; // 清除MODER5位
GPIOA->MODER |= GPIO_MODER_MODE5_0; // 设置MODER5位为01,推挽输出模式
```
**逻辑分析:**
* 使能GPIOA时钟,确保GPIOA外设可以正常工作。
* 清除MODER5位,将该引脚的模式复位为输入模式。
* 设置MODER5位为01,将该引脚配置为推挽输出模式。
#### 表格示例:定时器模式
| 模式 | 描述 |
|---|---|
| 向上计数 | 计数器从0开始向上计数 |
| 向下计数 | 计数器从最大值开始向下计数 |
| 捕获比较 | 计数器在达到指定值时触发中断 |
| PWM输出 | 计数器输出PWM信号 |
#### Mermaid流程图示例:中断处理流程
```mermaid
sequenceDiagram
participant User
participant STM32
User->STM32: Interrupt occurs
STM32->STM32: Save context
STM32->STM32: Execute interrupt handler
STM32->STM32: Restore context
```
# 4. STM32单片机软件开发**
### 4.1 C语言基础
C语言是STM32单片机软件开发中广泛使用的编程语言。本节将介绍C语言的基础知识,包括数据类型、变量、运算符和控制结构。
#### 数据类型
C语言提供了多种数据类型,用于存储不同类型的数据。常见的数据类型包括:
- 整数类型:int、short、long
- 浮点数类型:float、double
- 字符类型:char
- 指针类型:指针变量
#### 变量
变量用于存储数据。在使用变量之前,需要先声明其数据类型和名称。例如:
```c
int age;
float height;
```
#### 运算符
运算符用于对数据进行操作。C语言提供了丰富的运算符,包括:
- 算术运算符:+、-、*、/、%
- 关系运算符:==、!=、<、>、<=、>=
- 逻辑运算符:&&、||、!
#### 控制结构
控制结构用于控制程序的执行流程。常见的控制结构包括:
- if-else语句:根据条件执行不同的代码块
- switch-case语句:根据不同的情况执行不同的代码块
- for循环:重复执行一段代码
- while循环:当条件为真时重复执行一段代码
### 4.2 STM32标准库
STM32标准库是一组函数和宏,用于简化STM32单片机的外设操作。标准库提供了对GPIO、定时器、中断等外设的访问。
#### GPIO操作
GPIO(通用输入/输出)外设用于控制单片机的引脚。标准库提供了以下函数来操作GPIO:
- `HAL_GPIO_Init()`:初始化GPIO引脚
- `HAL_GPIO_WritePin()`:设置GPIO引脚输出电平
- `HAL_GPIO_ReadPin()`:读取GPIO引脚输入电平
#### 定时器操作
定时器外设用于生成脉冲和测量时间。标准库提供了以下函数来操作定时器:
- `HAL_TIM_Base_Init()`:初始化定时器
- `HAL_TIM_Base_Start()`:启动定时器
- `HAL_TIM_Base_Stop()`:停止定时器
#### 中断操作
中断是一种机制,当发生特定事件时触发程序执行。标准库提供了以下函数来操作中断:
- `HAL_NVIC_SetPriority()`:设置中断优先级
- `HAL_NVIC_EnableIRQ()`:使能中断
- `HAL_NVIC_DisableIRQ()`:禁止中断
### 4.3 嵌入式操作系统
嵌入式操作系统(RTOS)是一种软件,用于管理STM32单片机的资源和任务。RTOS提供了以下功能:
- 任务管理:创建、调度和同步任务
- 资源管理:管理内存、外设和中断
- 通信机制:提供任务间通信的机制
#### FreeRTOS
FreeRTOS是一款流行的RTOS,广泛用于STM32单片机开发。FreeRTOS提供了以下特性:
- 轻量级:占用极少的资源
- 实时性:响应时间可预测
- 可移植性:可移植到多种单片机平台
# 5.1 LED控制
LED控制是STM32单片机最基本的应用之一。通过控制GPIO引脚的电平,可以点亮或熄灭LED灯。
### GPIO引脚配置
要控制LED,首先需要配置相应的GPIO引脚。GPIO引脚的配置包括以下几个步骤:
1. **确定LED连接的GPIO引脚。**查阅STM32单片机手册,找到LED连接的GPIO引脚。
2. **使能GPIO时钟。**在RCC寄存器中使能对应GPIO端口的时钟。
3. **配置GPIO引脚模式。**将对应GPIO引脚配置为输出模式。
4. **配置GPIO引脚输出类型。**将对应GPIO引脚配置为推挽输出或开漏输出。
### 代码实现
以下代码演示了如何使用STM32标准库控制LED:
```c
#include "stm32f10x.h"
int main()
{
// 使能GPIOA时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
// 配置GPIOA.5为输出模式
GPIOA->CRH &= ~GPIO_CRH_MODE5;
GPIOA->CRH |= GPIO_CRH_MODE5_0;
// 配置GPIOA.5为推挽输出
GPIOA->CRH &= ~GPIO_CRH_CNF5;
GPIOA->CRH |= GPIO_CRH_CNF5_0;
while (1)
{
// 点亮LED
GPIOA->ODR |= GPIO_ODR_ODR5;
// 延时1秒
for (int i = 0; i < 1000000; i++);
// 熄灭LED
GPIOA->ODR &= ~GPIO_ODR_ODR5;
// 延时1秒
for (int i = 0; i < 1000000; i++);
}
return 0;
}
```
### 优化建议
为了优化LED控制代码,可以采用以下建议:
* 使用位带操作代替寄存器操作,提高代码效率。
* 使用定时器中断控制LED闪烁,避免CPU一直轮询,节省CPU资源。
* 使用DMA传输数据,提高数据传输速度。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏《STM32单片机入门教程》为初学者和经验丰富的开发人员提供全面的指南,涵盖从基础知识到高级编程技巧的各个方面。
本专栏深入剖析了STM32单片机的架构和运作机制,并通过C语言编程实战指导您打造第一个项目。您将探索串口、定时器和ADC等外设,并掌握时钟配置和中断处理的精髓。
此外,本专栏还介绍了DMA传输优化、固件更新秘籍、调试技巧和项目实战。您将了解传感器接口、电机控制、无线通信和电源管理等高级主题。
通过本专栏,您将掌握STM32单片机的方方面面,从基础到高级,从理论到实践,打造高效、可靠且安全的嵌入式系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
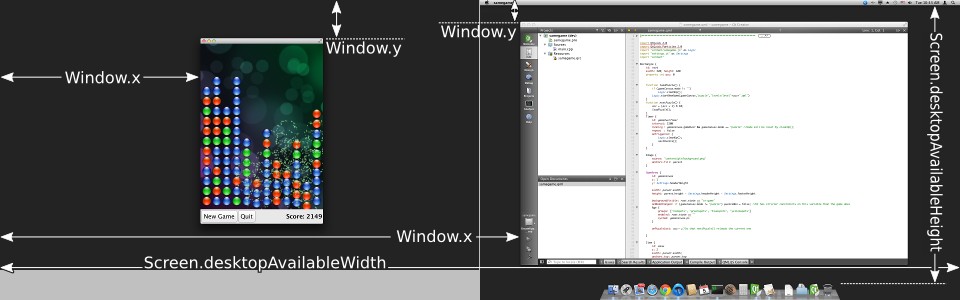
跨平台拖拽功能开发:Qt for Windows vs. Qt for Linux(实战对比分析)
# 摘要
本文综述了跨平台拖拽功能的实现方法和挑战,重点分析了在Qt框架下开发Windows和Linux平台拖拽功能的理论与实践。文章首先介绍了跨平台拖拽功能的基本概念和Qt框架下拖拽机制的理论基础,然后分别深入探讨了Windows和Linux平台上拖拽功能的特定处理和实践案例,包括平台特殊消息机制、API应用以及优化实践。通过对比分析,提出跨平台兼容性的优化策
【故障排除宝典】:AT91SAM7X256_128+以太网通信的EMAC接口诊断

# 摘要
本文重点介绍了AT91SAM7X256/128+微控制器的基础知识,EMAC接口的原理以及网络通信故障排除的相关技术和实践。通过对EMAC接口技术概述、故障诊断方法、常见网络故障案例的分析,进一步深化了对硬件和软件层面故障诊断的认识。文章还探讨了高级故障诊断技术,包括调试器和跟踪工具
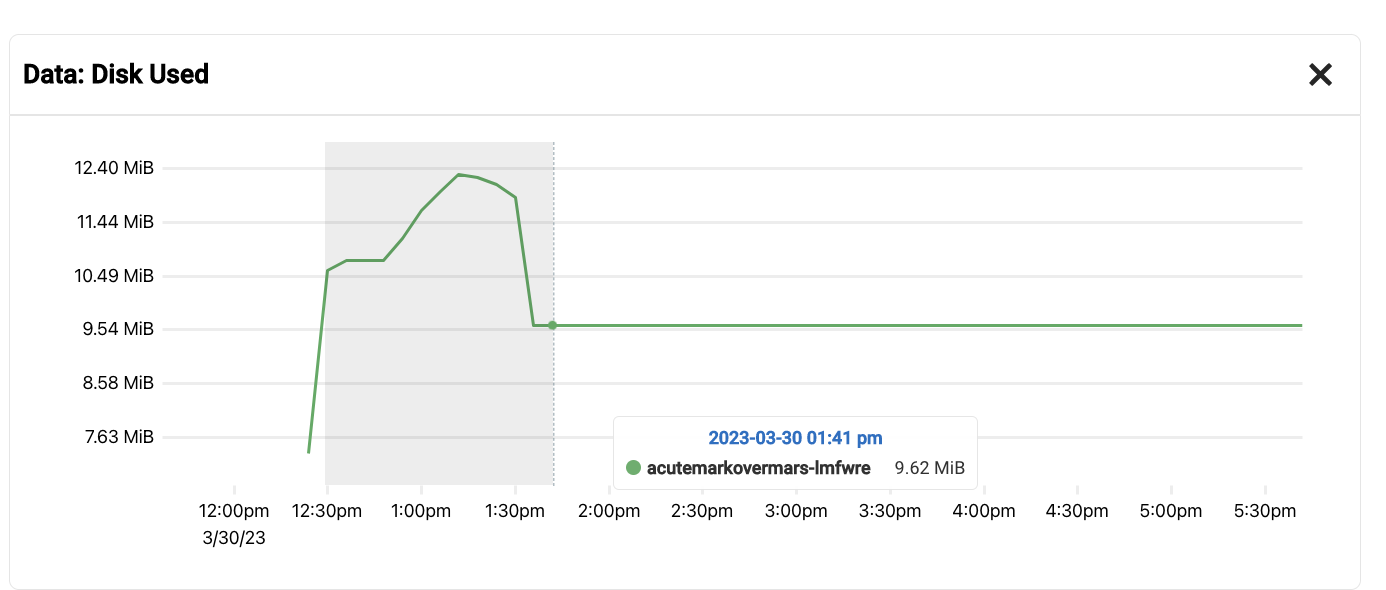
Linux服务器资源监控:3大技术实现数据实时收集与分析
# 摘要
随着信息技术的飞速发展,Linux服务器资源监控变得日益重要。本文从基础理论出发,深入探讨了Linux服务器资源监控的概念、数据收集方法和工具的实操应用。详细介绍了监控工具的选择标准和部署策略,以及在云环境下的监控技术。文章还展望了监控技术的未来趋势,重点分析了自动化、人工智能的应用以及监控数据安全性与隐私保护的重要性。通过实际案例分析,本文旨在为读者提供一套完整的Linux服务
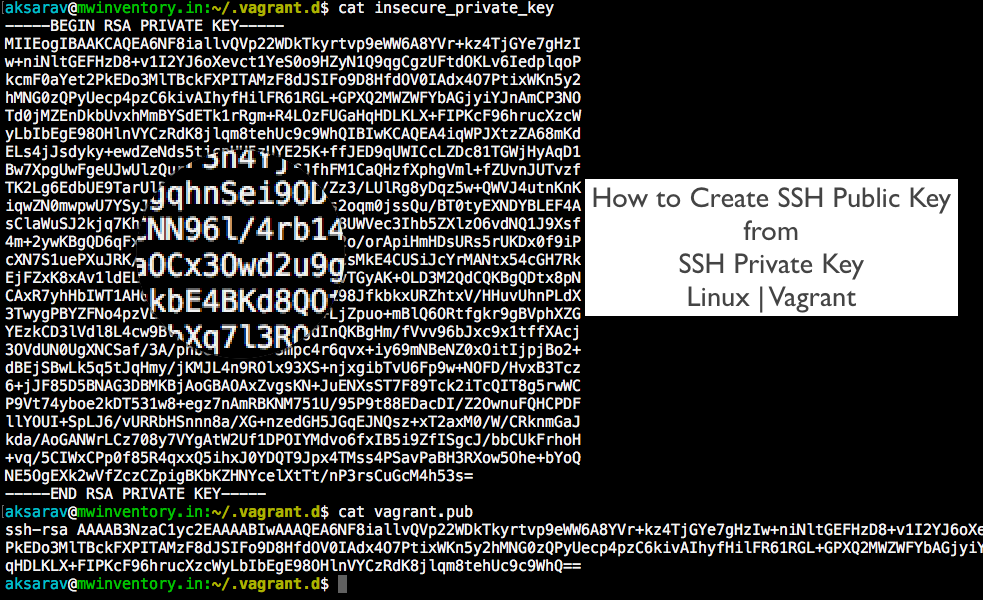
H3C交换机SSH配置安全宝典:加密与认证的实战技巧
# 摘要
本文旨在详细探讨SSH协议在H3C交换机上的应用和管理,包括SSH的基本配置、安全性能提升、故障排除以及性能优化等关键方面。文章首先介绍了SSH协议的基础知识和H3C交换机的相关概述,随后深入讨论了SSH服务的启用、用户认证配置以及密钥管理等基本配置方法。接着,文中分析了如何通过认证方式的深度设置、端口转发和X11转
实时性能的最佳实践:穿越NVIC库函数的迷雾
# 摘要
本文深入探讨了NVIC(嵌套向量中断控制器)库函数在嵌入式系统中的应用。首先概述了NVIC的基本作用和原理,并解析了其与Cortex-M处理器之间的关联。其次,详细介绍了NVIC寄存器的配置方法,包括优先级分组、
输入输出系统分析:四川大学试题实例讲解,优化系统I_O性能
# 摘要
输入输出系统是计算机系统的核心组成部分,涉及数据传输、处理及存储等多个方面。本文首先概述了输入输出系统的基本理论和性能指标,然后深入分析了四川大学试题实例,探讨了理论与实践的结合点。在性能优化方法方面,文章详细介绍了系统级和程序级的优化策略,并提供了实际的优化案例。最后,文章探讨了
【W5500以太网控制器终极指南】:24小时精通快速入门到高级应用案例

# 摘要
W5500以太网控制器是为嵌入式系统设计的一款高度集成的网络芯片,它提供了一个简单的接口,允许设备通过TCP/IP协议栈轻松接入网络。本文首先对W5500进行概述,然后详细介绍其基础操作,包括硬件接口、寄存器和内存映射、以及网络通信基础。随后,文章探讨了W5500在Arduino和树莓派等流行平台上的集成应用案例,展示如何实现物联网项目中的网络连接。此外,还介绍了一些高级编程技术,
自动化分析升级:掌握GAMIT批处理的5大高级应用
# 摘要
本文详细介绍了GAMIT软件的批处理操作,包括环境搭建、数据输入与预处理、参数配置、结果分析以及实际应用案例。通过对数据基础操作、噪声数据识别、异常值处理以及自动化脚本编写等技巧的探讨,实现了对大量数据的高效处理。本文还分析了如何配置核心批处理参数,并通过不同的批处理模式优化了运行效率和资源管理。结果分析章节阐述了如何解析和输出数据,确保了结果质量,并实现了
【数据挖掘快速入门】:SPSS 19.00在数据挖掘中的应用与潜力

# 摘要
数据挖掘是提取有价值信息和知识的过程,SPSS 19.00作为一个功能强大的统计分析软件,为数据挖掘提供了丰富工具。本文首先介绍了数据挖掘的概念和SPSS 19.00的基础操作,包括界面布局、数据输入管理以及数据预处理等。接着深入探讨了SPSS在描述性统计分析、高级分析技术以及数据可视化中的核心应用,并通过实践案例分析了SPSS在业务中的实际应用,包
远程监控与控制:欧姆龙E5CZ网络功能与实现技巧
# 摘要
本文详细介绍了欧姆龙E5CZ的网络功能,从基础网络监控的理论与技术开始,探讨了网络通信原理和通信协议,强调了数据加密与安全性的重要性。接着,文章深入远程监控系统的构建与实施,阐述了系统设计原则、E5CZ网络功能的实现,以及故障诊断与系统优化的策略。实际应用中的监控与控制技巧章节,提供了案例分析和高级控制功能的实现方法。最终,本文专注于远程监控系统的安全与维护,涵盖了系统安全性加固、系统更新与维护策略,以及技术支持与故障响应的详细讨论。通过这些内容,本文旨在为读者提供一个全面理解欧姆龙E5CZ网络功能以及如何有效构建和维护远程监控系统的技术指导。
# 关键字
欧姆龙E5CZ;网络监控
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )