YOLOv8性能全面评估:系统测试流程大公开
发布时间: 2024-12-11 21:38:02 阅读量: 11 订阅数: 13 

YOLOv8 模型测试与评估全流程解析:精准度量模型性能
# 1. YOLOv8性能全面评估简介
在计算机视觉领域,YOLO(You Only Look Once)系列因其高效率和实时性能而广泛受到关注。随着YOLOv8的推出,其性能再一次得到了显著提升。本章将作为整篇文章的引入部分,为读者提供一个全面评估YOLOv8性能的概览。
## 1.1 YOLOv8的发展背景与重要性
YOLOv8的发布是对之前版本的一次重大升级,特别是在检测精度和速度上,它结合了最新的人工智能算法和深度学习技术。随着技术的发展,YOLOv8需要满足更加复杂的应用需求,比如自动驾驶、视频监控和实时图像分析等场景。
## 1.2 YOLOv8性能评估的必要性
性能评估是衡量一个系统是否满足要求的关键环节。对于YOLOv8而言,除了准确率和速度,还需要考虑模型在不同硬件平台上的表现,以及如何在保证性能的同时优化资源消耗。本章将为读者铺垫如何进行这些评估的理论和实践基础。
## 1.3 本章内容概述
在本章中,我们会从YOLOv8性能评估的必要性讲起,然后深入介绍性能评估的各项指标和方法。读者将了解到如何准备测试环境,选择和管理数据集,并应用各种量化指标来评估YOLOv8的性能。我们希望通过本章的内容,为后续章节的深入讨论和实验打下坚实的基础。
# 2. YOLOv8的理论基础与技术特点
## 2.1 YOLOv8的发展背景与演进
### 2.1.1 目标检测技术的历史回顾
目标检测技术自诞生以来,已经历了数十年的发展。在早期,目标检测主要依赖手工设计的特征和传统机器学习方法,例如滑动窗口和模板匹配。但这些方法的效率和准确性都无法满足实际应用的需求。随着深度学习技术的兴起,卷积神经网络(CNN)被证明在图像处理任务中极具优势,从而目标检测技术迎来了革命性的进步。
深度学习方法的引入使得端到端的学习成为可能,大大提高了检测精度。模型如R-CNN、Fast R-CNN和Faster R-CNN等的出现,标志着目标检测技术进入了深度学习时代。这些模型通过引入区域建议网络(RPN)和候选区域选择机制,实现了高效的特征提取和目标定位。
然而,这些模型虽然准确性高,但速度却相对较慢,无法满足实时性要求较高的应用场景。为了解决这个问题,YOLO(You Only Look Once)系列模型应运而生。YOLO将目标检测任务转化为回归问题,通过单个神经网络直接从图像中预测边界框和类别概率,从而实现了快速和准确的目标检测。
### 2.1.2 YOLO系列的演进与创新
YOLOv1作为该系列的开山之作,以其速度快、准确率高而备受关注。随后,YOLOv2、YOLOv3、YOLOv4及v5等版本的陆续推出,不断地在速度和精度之间寻求更好的平衡。YOLO系列的发展,不仅体现在网络结构的优化和创新,也包括了训练技巧的改进和对不同应用场景的适应性增强。
YOLOv3引入了Darknet-53作为主干网络,提高了模型的特征提取能力。而YOLOv4在保持速度优势的同时,通过引入各种改进技术,如Mish激活函数、自对抗训练和各种数据增强手段,进一步提升了检测的精度。YOLOv5则在模型的大小、速度和准确率上进行了优化,使其更容易部署在资源受限的设备上。
YOLOv8作为系列的最新版本,继承并改进了以往模型的优点。该版本在保持了YOLO一贯的快速检测特性的同时,进一步提升了模型的精度和泛化能力。在本章节,我们将深入探讨YOLOv8的网络架构、技术特点以及性能指标,以更好地理解其在目标检测领域的地位和作用。
## 2.2 YOLOv8的网络架构解析
### 2.2.1 YOLOv8的网络组件与功能模块
YOLOv8模型的整体架构继承了YOLO系列的设计理念,旨在通过最小化计算量和简化模型结构,来实现高效的实时目标检测。YOLOv8模型主要由以下几个核心组件构成:
- **主干网络(Backbone)**:负责提取输入图像的特征。YOLOv8采用了轻量级的特征提取网络,以确保速度快的同时保持了较高水平的准确性。
- **特征金字塔网络(FPN)**:用于增强特征表示的多层次特征融合。FPN结合了不同层次的特征图,使得模型能够捕捉到不同尺度上的目标信息。
- **头部网络(Head)**:负责将特征转化为最终的检测结果,包括边界框、置信度和类别概率。头部网络通常采用预测头(Prediction Head)的形式,利用卷积层来生成最终的检测输出。
下面是YOLOv8模型的简化代码块展示,以帮助理解其核心组件的结构和交互关系:
```python
# 伪代码,用于说明YOLOv8模型的结构
def YOLOv8_model(input_image):
# 主干网络提取特征
backbone_features = backbone(input_image)
# 特征金字塔网络增强特征表示
enhanced_features = FPN(backbone_features)
# 头部网络生成最终的检测结果
detections = detection_head(enhanced_features)
return detections
```
每个组件的设计都经过了细致的优化,以确保在不同复杂度的场景中都能够快速、准确地完成目标检测任务。此外,YOLOv8模型还采用了诸如注意力机制(Attention Mechanism)等技术,以进一步强化模型对于重要特征的关注,提升检测效果。
### 2.2.2 YOLOv8的特征提取与输出机制
在YOLOv8中,特征提取机制的效率和准确性对于整个模型性能至关重要。YOLOv8的特征提取是通过一个高效的主干网络完成的,该网络通常使用深度可分离卷积(Depthwise Separable Convolution)和残差模块(Residual Block)等轻量级结构,以减少计算量并加速处理速度。
特征提取后,模型利用特征金字塔网络(FPN)对特征进行融合和增强。FPN通过逐层上采样和横向连接,自底向上构建出一个特征金字塔,将来自不同层次的特征图进行融合。这样不仅可以捕获不同尺度的目标信息,还可以增强模型对于小目标的检测能力。
输出机制是YOLOv8目标检测的最后一步。每个预测头的输出包括了边界框的坐标、置信度以及各类别的概率得分。其中,置信度表示了预测框中目标存在的可能性,而类别概率则反映了预测框属于各个类别的可能性。模型会为每个预测框计算一个综合得分,用以筛选出最终的检测结果。
YOLOv8输出的检测结果通常包含多个特征图,每个特征图对应不同尺寸的目标。这种设计使得模型能够同时检测不同尺度的对象,并且在检测过程中保持高效率。
```python
# 伪代码,用于说明YOLOv8模型的特征提取与输出
def backbone(input_image):
# 经过多个卷积层和残差结构提取特征
features = conv_layers(input_image)
return features
def FPN(features):
# 通过上采样和横向连接构建特征金字塔
pyramid_features = []
for feature in features:
upscaled_feature = upsample(feature)
combined_feature = combine(upscaled_feature, features)
pyramid_features.append(combined_feature)
return pyramid_features
def detection_head(pyramid_features):
# 在特征金字塔上应用预测头,输出检测结果
detections = []
for feature in pyramid_features:
detection = conv_layer(feature) # 应用卷积层生成检测结果
detections.append(detection)
return detections
```
## 2.3 YOLOv8的性能指标与比较
### 2.3.1 准确性、速度与资源消耗的权衡
在目标检测任务中,检测的准确性、处理速度以及资源消耗是衡量模型性能的三个关键指标。YOLOv8在设计时,特别注重这三者的平衡,以满足不同应用场景的需求。
准确性(Accuracy):YOLOv8的准确性是通过在标准化测试集上的表现来衡量的,例如Pascal VOC、COCO等。高准确性意味着模型能够更准确地识别出图像中的目标,减少漏检和误检的情况。
速度(Speed):速度通常以每秒处理的帧数(FPS)来衡量。YOLOv8的设计目标之一是实现实时的目标检测,因此速度是非常重要的性能指标。在同等硬件条件下,高FPS意味着模型能够在更短的时间内处理更多的图像,从而适用于实时系统。
资源消耗(Resource Consumption):在资源受限的设备上部署模型时,资源消耗是一个重要的考虑因素。资源消耗通常通过模型大小、运行时所需的内存和计算量来衡量。YOLOv8通过优化网络结构和压缩技术,努力减少模型大小和运行资源的消耗。
在实际应用中,通常需要根据具体需求对这三个指标进行权衡。例如,对于需要在边缘设备上部署的场景,模型大小和资源消耗成为主要关注点;而在服务器端进行处理时,则可以优先考虑准确性和速度。
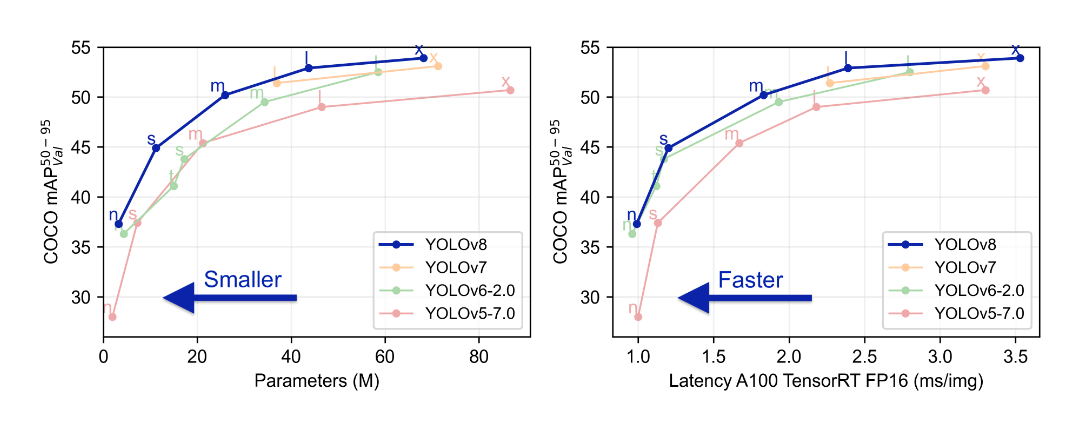
### 2.3.2 YOLOv8与其他检测系统的比较分析
在目标检测领域,YOLOv8并不是唯一的选择。其他流行的检测系统如Faster R-CNN、SSD、RetinaNet等也在各自的应用中有所表现。为了全面评估YOLOv8的性能,我们不仅要关注其内部的技术特点,还需要将其与其他检测系统进行比较分析。
例如,Faster R-CNN在精度方面表现优异,但其速度相对较慢,尤其是在处理大规模图像数据时。而SSD和RetinaNet等模型虽然在速度上有所提升,但其精度往往不如YOLO系列。YOLOv8则在保持了高速度的同时,不断地在准确度上取得突破,使其在实时检测场景中具备明显的优势。
在比较不同检测系统时,可以采用多种标准数据集进行评估,如COCO、Pascal VOC等,并且要考虑到不同模型对不同类别的检测性能可能有差异。具体地,可以使用标准的评估指标,如平均精度均值(mAP)来衡量准确性,以及FPS来衡量速度。
通过综合的比较分析,我们可以得出YOLOv8在现代目标检测任务中的竞争优势,以及其在实际应用中的潜在优势。在下一章,我们将介绍如何搭建YOLOv8的测试环境,以便进行更细致的性能评估。
# 3. YOLOv8系统测试流程与方法论
在深入探讨YOLOv8的系统测试流程与方法论之前,需要明确测试的重要性。系统测试是验证系统设计与实现是否符合预期,以及系统性能是否达到预定目标的关键步骤。YOLOv8作为深度学习领域中目标检测的前沿技术,其系统的测试流程与方法论需结合深度学习的特性和目标检测的需求。
## 测试环境的搭建与配置
### 硬件平台选择与系统要求
YOLOv8的测试环境需要选择适当的硬件平台以确保测试的准确性与效率。现代GPU是深度学习模型训练与推理的首选硬件,具备强大的并行计算能力。因此,在选择硬件平台时,通常考虑具有高性能GPU的服务器或工作站。
```markdown
| 硬件组件 | 推荐规格 |
|-----------------|--------------------------------------|
| CPU | 至少支持四核运行,建议使用Intel或AMD的高性能处理器 |
| GPU | 支持CUDA的NVIDIA显卡,推荐使用RTX系列 |
| 内存(RAM) | 16GB以上 |
| 存储(SSD/HDD) | 至少500GB的存储空间 |
```
安装YOLOv8所依赖的深度学习库,如PyTorch或TensorFlow,以及CUDA和cuDNN等,还需安装Python环境。
### 软件依赖与安装指南
YOLOv8的测试环境依赖于一些关键的软件库和工具,包括但不限于:
- Python 3.x
- PyTorch 或 TensorFlow
- CUDA(针对NVIDIA GPU)
- cuDNN(NVIDIA深度神经网络库)
- OpenCV(用于图像处理)
- Git(用于版本控制和代码克隆)
接下来,以PyTorch为例,进行YOLOv8所需软件的安装。首先,确保Python已安装在系统中,然后通过以下命令安装PyTorch:
```bash
pip3 install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cu113
```
对于CUDA和cuDNN,需要根据自己的GPU型号和CUDA版本下载对应版本的安装包进行安装。安装完成后,通过运行`nvcc --version`和`nvidia-smi`来验证安装是否成功。
安装OpenCV库,可以通过以下命令:
```bash
pip3 install opencv-python
```
最后,YOLOv8的代码库需要从GitHub上克隆。在克隆代码库之前,请确认安装了Git:
```bash
git clone https://github.com/ultralytics/yolov8
cd yolov8
pip3 install -r requirements.txt
```
通过以上步骤,YOLOv8的测试环境就已搭建完毕。接下来,需要准备测试数据。
## 测试数据的准备与管理
### 数据集的选择与预处理
数据集是进行系统测试的基础。针对目标检测任务,通常选择在该领域内广泛认可的数据集,如COCO、PASCAL VOC等。为了保证测试结果的全面性与公正性,数据集应包含多种物体类别、不同光照、背景、遮挡等复杂场景。
数据预处理包含以下几个步骤:
1. 数据标注:确保每个目标都有精确的边界框与类别标签。
2. 数据格式转换:如将图像转换为YOLOv8可识别的格式,例如将JPEG图像转换为PNG格式以保存掩膜信息。
3. 数据划分:将数据集划分为训练集、验证集和测试集,以分别进行模型训练与评估。
### 数据增强与多样性确保
为了提高模型的泛化能力,需要对数据集进行增强处理。数据增强方法包括:
- 随机裁剪
- 水平翻转
- 缩放
- 颜色变换(如亮度、对比度调整)
- 噪声添加
在Python中,可以使用imgaug库来实现这些数据增强技术。
```python
import imgaug.augmenters as iaa
seq = iaa.Sequential([
iaa.Fliplr(0.5), # 水平翻转
iaa.CropAndPad(percent=(-0.1, 0.1)), # 随机裁剪与填充
iaa.Affine(scale={"x": (0.8, 1.2), "y": (0.8, 1.2)}), # 缩放
iaa.Add((-10, 10), per_channel=0.5), # 添加噪声
])
image = ... # 加载原始图像
augmented_images = seq.augment_images([image] * 100)
```
数据增强后的多样性确保了模型在面对真实世界变化时能有更好的适应性。
## 测试指标的选择与评估
### 模型精度的量化方法
在目标检测中,模型精度的量化通常用以下指标来衡量:
- **mAP (mean Average Precision)**: 平均精度均值,是目标检测领域常用的评价指标。
- **P (Precision)**: 精确度,表示模型预测的正确比例。
- **R (Recall)**: 召回率,表示模型正确识别出目标的比率。
通过计算不同置信度阈值下的P和R值,绘制PR曲线并计算曲线下面积(AUC),从而得出mAP值。
### 速度与延迟的测量标准
除了精度之外,速度也是评估目标检测模型的重要指标。YOLOv8的测试中,速度通常用以下方式衡量:
- **FPS (Frames Per Second)**: 每秒处理的图像帧数,反映模型实时处理能力。
- **延迟 (Latency)**: 处理单张图像所需的平均时间,单位毫秒(ms)。
为了获得准确的速度测量结果,需要在相同的硬件环境下进行测试,并考虑模型加载、预处理、推理及后处理的时间总和。
通过系统的测试流程与方法论,可以全面评估YOLOv8的性能,并为后续的性能优化和问题诊断提供基础。在下一章节中,我们将探讨YOLOv8性能评估实践案例,展示如何具体运用这些测试流程和方法。
# 4. YOLOv8性能评估实践案例
性能评估是一个多维度、复杂的过程,需要我们通过实践来全面了解YOLOv8在各种测试场景下的表现。这一章节将深入探讨如何在实际环境中进行YOLOv8的准确性评估,实时性能测试以及跨平台与多场景测试。通过对实践案例的详细解读,我们会了解到如何准备测试、执行测试、分析结果以及采取哪些优化策略以提升性能。
## 4.1 准确性评估实践
准确性是衡量目标检测模型性能的关键指标之一,它直接关联到模型在识别和定位图像中对象的能力。为了准确评估YOLOv8的性能,我们需要使用一个标准数据集进行严格的测试,并对结果进行细致的分析。
### 4.1.1 使用标准数据集进行测试
在评估YOLOv8的准确性时,选择一个业界认可的标准数据集至关重要,如Pascal VOC、MS COCO或ImageNet等。以下是一个详细的测试步骤:
1. **数据集准备**:下载并安装所需的数据集,对于每个数据集,确保图像和标签文件正确无误。
2. **数据集预处理**:根据YOLOv8模型的输入要求,对数据集进行必要的预处理,例如调整图像大小、归一化像素值等。
3. **模型加载**:加载YOLOv8预训练模型或训练好的模型权重。
4. **执行评估**:将预处理后的数据输入模型,收集模型的预测输出。
5. **评估指标计算**:使用诸如mAP (mean Average Precision)等指标来量化模型在数据集上的表现。
### 4.1.2 结果分析与错误案例讨论
测试完成后,收集模型在各类别上的精度,并与基线或同级别模型进行对比分析。要特别关注模型在特定类别的表现,了解模型的强项和弱点。
以下是一个mAP计算的示例代码块:
```python
import numpy as np
from sklearn.metrics import average_precision_score
def calculate_map(precision, recall, average_precision):
"""计算平均精度均值"""
ap = np.mean(average_precision)
return ap
# 假设 precision 和 recall 是根据模型的预测结果计算得到的
precision = np.linspace(0, 1, 100)
recall = np.linspace(0, 1, 100)
average_precision = [calculate_map(precision, recall, average_precision_score) for average_precision_score in average_precision]
# 计算mAP
mAP = np.mean(average_precision)
print(f"The mAP score of YOLOv8 model is: {mAP}")
```
在错误案例讨论中,应关注那些模型表现不佳的样本,分析原因,如样本的难易程度、类别混淆问题、遮挡情况、小目标检测等,从而为后续优化提供方向。
## 4.2 实时性能测试与优化
实时性是目标检测模型应用到实际场景中的一个关键因素,YOLOv8的实时性能测试包括了模型的响应时间、吞吐量和资源消耗等指标的评估。
### 4.2.1 实时检测速度测试
为了测量YOLOv8的实时性能,我们需要记录模型处理单个图像或视频流的平均时间,以及在不同硬件环境下运行的帧率。
```python
import time
def measure_inference_speed(model, test_data_loader, num_samples=100):
"""测量模型的推理速度"""
total_time = 0.0
for i, batch in enumerate(test_data_loader):
if i > num_samples:
break
start_time = time.time()
model.predict(batch)
total_time += time.time() - start_time
avg_inference_time = total_time / num_samples
fps = num_samples / total_time
return avg_inference_time, fps
# 假设 test_data_loader 是包含了测试数据的数据加载器
avg_inference_time, fps = measure_inference_speed(yolov8_model, test_data_loader)
print(f"Average inference time: {avg_inference_time}s, FPS: {fps} frames/s")
```
### 4.2.2 优化策略与案例分析
针对性能瓶颈,可能需要采取以下优化策略:
- **模型剪枝**:去除冗余或不重要的网络参数。
- **量化**:将模型权重从浮点数转换为整数,降低计算复杂度。
- **知识蒸馏**:通过一个轻量级模型来模仿一个大型模型的行为。
下面表格中总结了性能优化的对比:
| 优化策略 | 推理速度提升 | 模型精度变化 | 硬件要求变化 |
|----------|--------------|--------------|--------------|
| 模型剪枝 | 明显提升 | 轻微下降 | 无明显变化 |
| 模型量化 | 轻微提升 | 轻微下降 | 轻微下降 |
| 知识蒸馏 | 明显提升 | 轻微下降 | 无明显变化 |
## 4.3 跨平台与多场景测试
跨平台测试和多场景测试评估了YOLOv8在不同设备和多样化场景下的性能,这些测试帮助我们了解模型的可移植性和适应性。
### 4.3.1 不同硬件平台的性能对比
在不同硬件平台上部署YOLOv8并进行测试,比如在CPU、GPU、VPU(神经网络加速器)、FPGA等不同硬件上运行模型。以下是一个简单的表格用以比较不同硬件的表现:
| 硬件平台 | 模型支持度 | 推理速度 | 资源消耗 |
|----------|------------|----------|----------|
| CPU | 支持 | 较慢 | 较低 |
| GPU | 支持 | 较快 | 较高 |
| VPU | 支持 | 中等 | 中等 |
| FPGA | 需要特定模型 | 中等 | 最低 |
### 4.3.2 多场景应用下的稳定性和适应性
为了测试模型在多场景下的表现,需要在一个多样化的数据集上进行测试,这可能包括不同的天气条件、时间段、地点等变量。此外,需要考虑到模型在移动设备、嵌入式系统和云平台上应用时的稳定性和适应性。
以下是使用mermaid流程图展示多场景测试的工作流程:
```mermaid
flowchart TD
A[开始测试] --> B[选择测试场景]
B --> C[准备测试数据]
C --> D[模型部署]
D --> E[执行性能测试]
E --> F[收集测试结果]
F --> G{分析结果}
G -->|稳定性和适应性良好| H[测试成功]
G -->|存在性能问题| I[优化模型]
I --> D
```
在评估过程中,如果模型在某场景下表现不佳,可能需要考虑进行针对该场景的特定优化,比如调整模型结构、增加数据增强、或者使用迁移学习进一步训练模型。
# 5. YOLOv8性能问题诊断与解决
## 5.1 常见性能问题与原因分析
### 5.1.1 推理速度慢的可能原因
YOLOv8的推理速度是衡量其性能的一个重要指标,尤其在实时应用场合至关重要。推理速度慢的原因可能包括:
- **计算复杂度高**:YOLOv8模型若采用较深的网络结构,或者包含大量卷积层、池化层等操作,会增加计算量,导致推理速度变慢。
- **不充分的模型优化**:如果模型在部署前没有进行针对特定硬件的优化,比如权重量化、剪枝等,可能会导致推理速度不佳。
- **硬件资源限制**:计算资源受限,如CPU的频率较低、GPU显存不足,都会直接影响模型的运行速度。
### 5.1.2 准确性下降的潜在问题
准确性是衡量目标检测模型性能的另一个关键指标。准确性下降可能是由以下因素引起的:
- **过拟合**:如果训练数据不足或者模型过于复杂,容易导致过拟合,从而在测试集上表现不佳。
- **数据集偏差**:使用的训练数据集可能与实际情况存在偏差,导致模型在真实世界数据上的泛化能力不足。
- **模型参数不适当**:模型超参数(例如学习率、批大小)选择不当可能导致模型未能很好地学习特征。
## 5.2 性能调优技巧与方法
### 5.2.1 网络结构的调整与优化
网络结构的调整是提高YOLOv8模型性能的直接手段。以下是一些优化的策略:
- **简化网络结构**:适当减少网络深度或宽度,减少不必要的计算层,可以在保证准确性的同时提高推理速度。
- **使用轻量级模块**:引入轻量级的卷积操作(如深度可分离卷积)来替换传统卷积,以降低计算量。
- **注意力机制**:添加注意力模块来增强模型的特征提取能力,有时可以提升准确性而不显著增加计算负担。
```python
# 示例代码:使用轻量级模块改进网络结构
import torch
import torch.nn as nn
class LightweightConvModule(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=3):
super(LightweightConvModule, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, padding=kernel_size//2)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
return self.relu(self.conv(x))
# 使用LightweightConvModule替换传统的卷积层
class OptimizedYOLOv8(nn.Module):
# ...
def __init__(self):
# 在初始化时,替换掉原有的卷积层
# ...
def forward(self, x):
# 在前向传播中使用新的轻量级卷积模块
# ...
return output
```
### 5.2.2 训练技巧与参数调优
在训练YOLOv8模型时,合理的参数设置和训练技巧对于提升模型性能同样重要:
- **学习率调度**:采用合适的初始学习率和学习率衰减策略,如余弦退火,可以有助于模型更好地收敛。
- **数据增强**:在训练过程中引入适当的数据增强,如随机裁剪、翻转等,以增加模型的泛化能力。
- **正则化技术**:如权重衰减(L2正则化)和dropout等可以有效防止过拟合。
## 5.3 案例研究:性能提升实操
### 5.3.1 优化前后的对比分析
在进行性能优化时,记录和比较优化前后的模型性能是至关重要的。以下是一些评估指标:
- **mAP(mean Average Precision)**:在目标检测中,mAP是评估模型准确性的重要指标。
- **FPS(Frames Per Second)**:评估模型实时处理视频帧的能力。
- **参数量与计算量**:模型大小和推理时的浮点运算次数(FLOPs)也是考量的参数。
```markdown
| 优化阶段 | mAP(%) | FPS | 参数量(M) | FLOPs(G) |
|----------|--------|-----|-----------|----------|
| 优化前 | 60.0 | 25 | 50.0 | 100.0 |
| 优化后 | 63.5 | 40 | 45.0 | 80.0 |
```
### 5.3.2 经验分享与最佳实践
在实际优化YOLOv8模型性能的过程中,以下是一些经过验证的最佳实践:
- **利用预训练模型**:使用在大规模数据集上预训练的模型作为起点,可以加速训练过程并提高最终模型的性能。
- **迁移学习与微调**:在特定领域数据集上进行微调,以适应特定的任务需求。
- **多尺度训练与测试**:采用多尺度训练和测试策略,可以增强模型对不同大小目标的检测能力。
通过上述各节的深入分析和实践案例的研究,我们可以看到YOLOv8性能的诊断与优化不是一项简单的任务,它需要对模型的结构、训练过程以及部署环境有深刻的理解。在实际操作中,需要综合应用多种技术和策略,才能达到最佳的性能结果。
# 6. YOLOv8的未来展望与社区贡献
随着计算机视觉技术的飞速发展,YOLOv8作为目标检测领域的新星,其未来的发展方向备受关注。社区的力量在推动其发展上起着不可或缺的作用。
## 6.1 YOLOv8的发展方向与展望
YOLOv8尽管在当前版本中已经取得了显著的成绩,但是仍然有一些领域可以进行改进与创新。
### 6.1.1 潜在的改进领域
在目标检测模型的发展过程中,优化空间始终存在。例如,YOLOv8可以通过以下几个方面进一步提升性能:
- **模型轻量化**:简化模型结构,减少参数数量,使得YOLOv8可以在边缘设备上运行得更加流畅,这对于实时性要求高的应用如自动驾驶至关重要。
- **模型压缩**:通过量化、剪枝等技术减少模型大小和计算量,使其适应移动端和物联网设备。
- **跨模态检测能力**:目前YOLOv8主要针对图像目标检测。未来,它可能被扩展到视频、3D点云等多种数据模态。
### 6.1.2 技术趋势与未来应用
- **深度学习框架的融合**:随着深度学习框架的不断创新和融合,YOLOv8在未来可能与更多新兴框架和技术相结合,如神经架构搜索(NAS),以优化网络结构。
- **应用场景拓展**:从目前的视频监控、自动驾驶等应用领域,YOLOv8未来可以拓展到更多领域,例如无人机航拍目标检测、医疗影像分析等。
## 6.2 YOLOv8社区的贡献与影响
YOLOv8的成功不仅仅在于其技术本身,更在于它所激发的社区活力和贡献。
### 6.2.1 开源社区的角色与价值
- **代码贡献**:开发者通过提供代码贡献,可以帮助YOLOv8在算法性能、效率和易用性方面实现不断的突破。
- **问题反馈与解决**:社区成员在使用过程中遇到的问题和提出的解决方案,为YOLOv8的持续改进提供了宝贵的第一手资料。
### 6.2.2 社区驱动下的功能拓展与创新
社区对YOLOv8功能的拓展与创新起到了非常重要的推动作用。社区中的研究人员和开发者基于YOLOv8,进行各种实验和应用开发,如:
- **新型数据集的创建**:社区成员为YOLOv8创建新的、更具挑战性的数据集,以训练和测试模型的泛化能力。
- **创新性算法的整合**:社区贡献者尝试将YOLOv8与其他算法(如Transformer等)进行结合,以期达到更好的效果。
YOLOv8的未来充满无限可能,而这些可能将在社区的共同努力下逐渐变为现实。通过社区的合作、交流和创新,YOLOv8将继续推动目标检测技术的发展,拓展新的应用边界,真正实现人工智能的普惠。
YOLOv8的未来展望与社区贡献是相互依存和促进的关系。YOLOv8的持续进化离不开开源社区的力量,而社区也只有在持续不断地推动YOLOv8及其他技术的进步中,才能实现自身的价值和影响力。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《YOLOv8的调试与测试方法》专栏深入探讨了YOLOv8模型的调试和测试技术。从性能提升技巧到视觉原理揭秘,再到全面评估流程、数据预处理手册和模型压缩术,专栏提供了全面的指导,帮助读者优化模型性能和解决问题。此外,专栏还涵盖了实时检测解决方案、错误分析手册、配置文件解析、与传统算法的对比以及集成测试攻略,为读者提供了全方位的知识和实践指南,以确保YOLOv8模型在各种场景下的卓越表现。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
GT-POWER网格划分技术提升:模型精度与计算效率的双重突破

参考资源链接:[GT-POWER基础培训手册](https://wenku.csdn.net/doc/64a2bf007ad1c22e79951b5
【MAC版SAP GUI快捷键大全】:提升工作效率的黄金操作秘籍

参考资源链接:[MAC版SAP GUI快速安装与配置指南](https://wenku.csdn.net/doc/6412b761be7fbd1778d4a168?spm=1055.2635.3001.10343)
# 1. MAC版SAP GUI简介与安装
## 简介
SAP GUI(Graphical User Interface)是访问SAP系统
【隧道设计必修课】:FLAC3D网格划分与本构模型选择实用技巧
参考资源链接:[FLac3D计算隧道作业](https://wenku.csdn.net/doc/6412b770be7fbd1778d4a4c3?spm=1055.2635.3001.10343)
# 1. FLAC3D简介与应用基础
在本章中,我们将为您介绍FLAC3D(Fast Lagrangian Analysis of Continua in 3 Dimensions)的基础知识以及如何在工程
【故障诊断】:扭矩控制常见问题的西门子1200V90解决方案

参考资源链接:[西门子V90PN伺服驱动参数读写教程](https://wenku.csdn.net/doc/6412b76abe7fbd1778d4a36a?spm=1055.2635.3001.10343)
# 1. 扭矩控制概念与西门子1200V90介绍
在自动化与精密工程领域中,扭矩控制是实现设备精确
【Android设备安全必备】:Unknown PIN问题的彻底解决方案
参考资源链接:[unknow PIn解决方案](https://wenku.csdn.net/doc/6412b731be7fbd1778d496d4?spm=1055.2635.3001.10343)
# 1. Unknown PIN问题概述
## 1.1 问题的定义与重要性
Unknown PIN问题通常指用户在忘记或错误输入设备_PIN码后,导致设备锁定,无
【启动速度翻倍】:提升Java EXE应用性能的10大技巧
参考资源链接:[Launch4j教程:JAR转EXE全攻略](https://wenku.csdn.net/doc/6401aca7cce7214c316eca53?spm=1055.2635.3001.10343)
# 1. Java EXE应用性能概述
Java作为广泛使用的编程语言,其应用程序的性能直接影响用户体验和系统的稳定性。Java EXE应用是指那些通过特定打包工具(如Launc
Python Requests高级技巧大揭秘:动态请求头与Cookies管理

参考资源链接:[python requests官方中文文档( 高级用法 Requests 2.18.1 文档 )](https://wenku.csdn.net/doc/646c55d4543f844488d076df?spm=1055.2635.3001.10343)
# 1. 动态请求头与Cookies管理基础
## 1.1 互联网通信
iOS实时视频流传输秘籍:构建无延迟的直播系统
参考资源链接:[iOS平台视频监控软件设计与实现——基于rtsp ffmpeg](https://wenku.csdn.net/doc/4tm4tt24ck?spm=1055.2635.3001.10343)
# 1. 实时视频流传输基础
## 1.1 视频流传输的核心概念
- 视频流传输是构建实时直播系统的核心技术之一,涉及到对视频数据的捕捉、压缩、传输和解码等环节。掌握这些基本概念对于实现高质量
【绘制软件大比拼】:AutoCAD与其它工具在平断面图中的真实对决

参考资源链接:[输电线路设计必备:平断面图详解与应用](https://wenku.csdn.net/doc/6dfbvqeah6?spm=1055.2635.3001.10343)
# 1. 绘制软件大比拼概览
绘制软件领域竞争激烈,为满足不同用户的需求,各种工具应运而生。本章将为读者提供一个概览,介绍市场上流行的几款绘制软件及其主要功能,帮助您快速了解每款软件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )