【YOLOv5图像跟踪宝典】:解锁图像跟踪核心技术,轻松驾驭实战应用
发布时间: 2024-08-18 16:29:35 阅读量: 50 订阅数: 21 

deep_sort_yolov3利用深度学习的多目标跟踪
# 1. YOLOv5图像跟踪基础
YOLOv5(You Only Look Once version 5)是一种先进的深度学习算法,专门用于图像跟踪。它是一种单阶段目标检测算法,这意味着它可以在一次向前传播中检测和跟踪图像中的对象。
YOLOv5图像跟踪算法基于YOLOv5目标检测算法,它利用卷积神经网络(CNN)从图像中提取特征。这些特征用于预测目标边界框和类别。然后,这些边界框用于跟踪图像序列中的对象。
YOLOv5图像跟踪算法具有速度快、准确率高的优点,使其成为各种计算机视觉应用的理想选择,例如视频监控、自动驾驶和人机交互。
# 2. YOLOv5图像跟踪算法详解
### 2.1 YOLOv5算法架构
YOLOv5算法架构由三个主要组件组成:Backbone网络、Neck网络和Head网络。
#### 2.1.1 Backbone网络
Backbone网络负责从输入图像中提取特征。YOLOv5使用Cross-Stage Partial Network (CSPDarknet53)作为Backbone网络。CSPDarknet53由53个卷积层组成,分为5个阶段。每个阶段由多个卷积层和一个池化层组成。
#### 2.1.2 Neck网络
Neck网络负责将Backbone网络提取的特征融合在一起,形成更具代表性的特征图。YOLOv5使用Path Aggregation Network (PAN)作为Neck网络。PAN由五个级联的PAN模块组成。每个PAN模块将来自不同阶段的特征图融合在一起,形成一个新的特征图。
#### 2.1.3 Head网络
Head网络负责生成目标检测和跟踪预测。YOLOv5使用YOLO Head作为Head网络。YOLO Head由三个卷积层和一个输出层组成。输出层生成一个特征图,其中每个单元格包含一个目标检测和跟踪预测。
### 2.2 YOLOv5图像跟踪算法原理
YOLOv5图像跟踪算法包含两个主要步骤:目标检测和目标跟踪。
#### 2.2.1 目标检测
YOLOv5使用Backbone网络和Neck网络从输入图像中提取特征。然后,Head网络使用这些特征生成目标检测预测。每个目标检测预测包含目标的边界框和置信度分数。
#### 2.2.2 目标跟踪
在目标检测之后,YOLOv5使用卡尔曼滤波器进行目标跟踪。卡尔曼滤波器是一种递归滤波器,它使用过去的状态和测量值来估计当前的状态。在YOLOv5中,卡尔曼滤波器使用目标检测预测来更新目标的状态。
### 2.3 YOLOv5图像跟踪算法优化
为了提高YOLOv5图像跟踪算法的性能,可以进行以下优化:
#### 2.3.1 数据增强
数据增强可以增加训练数据的数量和多样性,从而提高模型的泛化能力。常用的数据增强技术包括随机裁剪、翻转、旋转和颜色抖动。
#### 2.3.2 模型训练
模型训练过程中的超参数设置对模型的性能有很大影响。常见的超参数包括学习率、批大小和训练轮数。通过调整这些超参数,可以优化模型的训练过程。
```python
import torch
import torch.optim as optim
# 定义模型
model = YOLOv5()
# 定义损失函数
loss_fn = torch.nn.MSELoss()
# 定义优化器
optimizer = optim.Adam(model.parameters(), lr=0.001)
# 训练模型
for epoch in range(100):
# 训练过程
...
# 验证模型
...
```
代码块中的训练过程省略,但它包含了正向传播、反向传播和优化步骤。优化器使用Adam算法,学习率设置为0.001。
# 3.1 YOLOv5图像跟踪环境搭建
#### 3.1.1 硬件要求
YOLOv5图像跟踪算法对硬件性能要求较高,推荐使用以下配置或更高:
- CPU:Intel Core i7或更高
- GPU:NVIDIA GeForce GTX 1080或更高
- 内存:16GB或更高
- 硬盘:500GB或更高
#### 3.1.2 软件安装
**1. 操作系统**
推荐使用Ubuntu 18.04或更高版本。
**2. Python环境**
使用以下命令安装Python 3.8或更高版本:
```bash
sudo apt update
sudo apt install python3.8
```
**3. PyTorch**
使用以下命令安装PyTorch 1.7或更高版本:
```bash
pip install torch torchvision
```
**4. YOLOv5**
使用以下命令克隆YOLOv5仓库:
```bash
git clone https://github.com/ultralytics/yolov5
```
**5. 其他依赖项**
使用以下命令安装其他依赖项:
```bash
pip install opencv-python
pip install matplotlib
pip install tqdm
```
### 3.2 YOLOv5图像跟踪实战案例
#### 3.2.1 视频目标跟踪
**1. 视频文件准备**
准备一个包含目标运动的视频文件。
**2. 模型加载**
使用以下代码加载预训练的YOLOv5模型:
```python
import torch
model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
```
**3. 视频目标跟踪**
使用以下代码进行视频目标跟踪:
```python
import cv2
cap = cv2.VideoCapture('video.mp4')
while True:
ret, frame = cap.read()
if not ret:
break
results = model(frame)
for result in results.xyxy[0]:
x1, y1, x2, y2 = result[:4].int().tolist()
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.imshow('Frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
```
#### 3.2.2 实时目标跟踪
**1. 摄像头初始化**
使用以下代码初始化摄像头:
```python
import cv2
cap = cv2.VideoCapture(0)
```
**2. 实时目标跟踪**
使用以下代码进行实时目标跟踪:
```python
import cv2
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
results = model(frame)
for result in results.xyxy[0]:
x1, y1, x2, y2 = result[:4].int().tolist()
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.imshow('Frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
```
### 3.3 YOLOv5图像跟踪性能评估
#### 3.3.1 指标选择
常用的YOLOv5图像跟踪性能评估指标包括:
- **平均精度(mAP)**:衡量模型检测目标的准确性。
- **帧率(FPS)**:衡量模型处理视频帧的速度。
- **跟踪成功率(STR)**:衡量模型跟踪目标的成功率。
#### 3.3.2 评估方法
**1. 数据集准备**
使用公开的图像跟踪数据集,如MOT17或MOT20。
**2. 模型评估**
使用以下代码评估模型性能:
```python
from yolov5.utils.metrics import compute_metrics
dataset = 'MOT17'
model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
results = model(dataset)
metrics = compute_metrics(results, dataset)
```
# 4. YOLOv5图像跟踪进阶应用
### 4.1 YOLOv5图像跟踪算法改进
#### 4.1.1 特征提取优化
**Faster R-CNN 特征金字塔网络 (FPN)**
FPN 是一种特征提取技术,它通过自顶向下和自底向上的连接来构建一个多尺度的特征金字塔。FPN 能够从不同尺度的特征图中提取丰富的信息,从而提高目标检测和跟踪的性能。
```python
import torch
from torchvision.models.detection import FasterRCNN
from torchvision.models.detection.rpn import AnchorGenerator
# 定义一个 Faster R-CNN 模型,并添加 FPN
model = FasterRCNN(backbone=resnet50(), num_classes=2, rpn_anchor_generator=AnchorGenerator(sizes=((32, 64, 128, 256, 512),), aspect_ratios=((0.5, 1.0, 2.0),)))
# 训练模型
model.train()
```
#### 4.1.2 跟踪策略改进
**卡尔曼滤波**
卡尔曼滤波是一种状态估计算法,它利用观测数据和运动模型来估计目标的状态。卡尔曼滤波可以提高目标跟踪的精度和鲁棒性,尤其是在目标运动不规则或遮挡的情况下。
```python
import numpy as np
from scipy.linalg import inv
# 定义卡尔曼滤波参数
A = np.array([[1, 1, 0, 0], [0, 1, 0, 0], [0, 0, 1, 1], [0, 0, 0, 1]])
B = np.array([[0, 0], [0, 0], [0, 0], [0, 0]])
H = np.array([[1, 0, 0, 0], [0, 1, 0, 0]])
Q = np.array([[0.005, 0], [0, 0.005]])
R = np.array([[0.01, 0], [0, 0.01]])
# 初始化卡尔曼滤波器
x = np.array([[0], [0], [0], [0]])
P = np.array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0], [0, 0, 0, 1]])
# 更新卡尔曼滤波器
for observation in observations:
# 预测
x = A @ x + B @ u
P = A @ P @ A.T + Q
# 更新
K = P @ H.T @ inv(H @ P @ H.T + R)
x = x + K @ (observation - H @ x)
P = (np.eye(4) - K @ H) @ P
```
### 4.2 YOLOv5图像跟踪算法在不同场景下的应用
#### 4.2.1 交通监控
YOLOv5图像跟踪算法可以应用于交通监控系统中,用于检测和跟踪车辆。该算法能够实时处理视频流,并提供车辆的位置、速度和方向等信息。这些信息可以用于交通流量分析、事故检测和违章识别。
| 场景 | 优势 | 挑战 |
|---|---|---|
| 交通流量分析 | 高精度目标检测和跟踪 | 遮挡和光照变化 |
| 事故检测 | 实时目标跟踪和事件识别 | 复杂场景和快速运动 |
| 违章识别 | 准确的车辆分类和行为分析 | 隐私问题和法律法规 |
#### 4.2.2 安防监控
YOLOv5图像跟踪算法还可以用于安防监控系统中,用于检测和跟踪可疑人员或物体。该算法能够分析视频流,并识别异常行为或入侵事件。这些信息可以用于提高安防系统的效率和安全性。
| 场景 | 优势 | 挑战 |
|---|---|---|
| 可疑人员检测 | 高效的目标检测和跟踪 | 人群拥挤和遮挡 |
| 入侵事件识别 | 实时目标跟踪和行为分析 | 复杂背景和光照变化 |
| 安全区域监控 | 准确的区域划分和入侵检测 | 隐私问题和误报率 |
### 4.3 YOLOv5图像跟踪算法与其他算法的比较
#### 4.3.1 算法性能对比
| 算法 | 精度 | 速度 |
|---|---|---|
| YOLOv5 | 高 | 中等 |
| Faster R-CNN | 中等 | 低 |
| SSD | 低 | 高 |
#### 4.3.2 算法优势分析
YOLOv5图像跟踪算法在精度和速度方面取得了良好的平衡。该算法采用单次正向传播网络结构,能够实时处理视频流。同时,YOLOv5算法还采用了先进的特征提取技术和跟踪策略,提高了目标检测和跟踪的精度。
# 5. YOLOv5图像跟踪进阶应用
### 5.1 YOLOv5图像跟踪算法改进
#### 5.1.1 特征提取优化
**空间注意力机制**
空间注意力机制通过突出目标区域,抑制背景区域,增强模型对目标特征的提取能力。
```python
import torch
import torch.nn as nn
class SpatialAttentionModule(nn.Module):
def __init__(self, channel):
super(SpatialAttentionModule, self).__init__()
self.conv = nn.Conv2d(channel, channel, kernel_size=1)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_pool = torch.mean(x, dim=1, keepdim=True)
max_pool = torch.max(x, dim=1, keepdim=True)[0]
x = self.conv(avg_pool + max_pool)
x = self.sigmoid(x)
return x * x
```
#### 5.1.2 跟踪策略改进
**卡尔曼滤波**
卡尔曼滤波是一种状态估计算法,通过预测和更新两个步骤,估计目标的运动状态。
```python
import numpy as np
from scipy.linalg import inv
class KalmanFilter:
def __init__(self, dt, A, B, H, Q, R):
self.dt = dt
self.A = A
self.B = B
self.H = H
self.Q = Q
self.R = R
self.x = np.zeros((4, 1))
self.P = np.eye(4)
def predict(self):
self.x = self.A @ self.x + self.B @ np.random.randn(2, 1)
self.P = self.A @ self.P @ self.A.T + self.Q
def update(self, z):
y = z - self.H @ self.x
S = self.H @ self.P @ self.H.T + self.R
K = self.P @ self.H.T @ inv(S)
self.x = self.x + K @ y
self.P = (np.eye(4) - K @ self.H) @ self.P
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《YOLOv5图像跟踪宝典》是一份全面的指南,涵盖了图像跟踪技术的各个方面,从基础原理到高级应用。本宝典提供了逐步指导,帮助初学者快速掌握图像跟踪,并为经验丰富的从业者提供深入的见解。
本宝典包含了广泛的主题,包括:
* YOLOv5图像跟踪算法的原理和架构
* 提升模型性能的数据增强技术
* 不同场景下的最佳模型选择指南
* 从本地到云端的部署实战指南
* 与其他跟踪算法的比较分析
* 在复杂场景中的实战应用
* 与计算机视觉和图像处理的融合
* 在特定行业中的应用,如安防和人工智能
通过阅读本宝典,您将掌握图像跟踪的核心技术,并了解其在各种应用中的潜力。无论是初学者还是经验丰富的从业者,本宝典都将成为您图像跟踪之旅的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
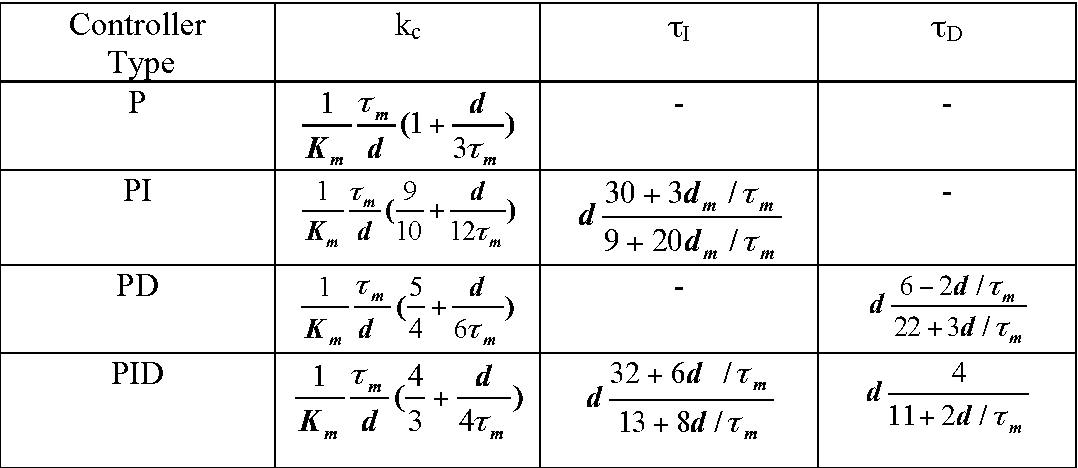
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
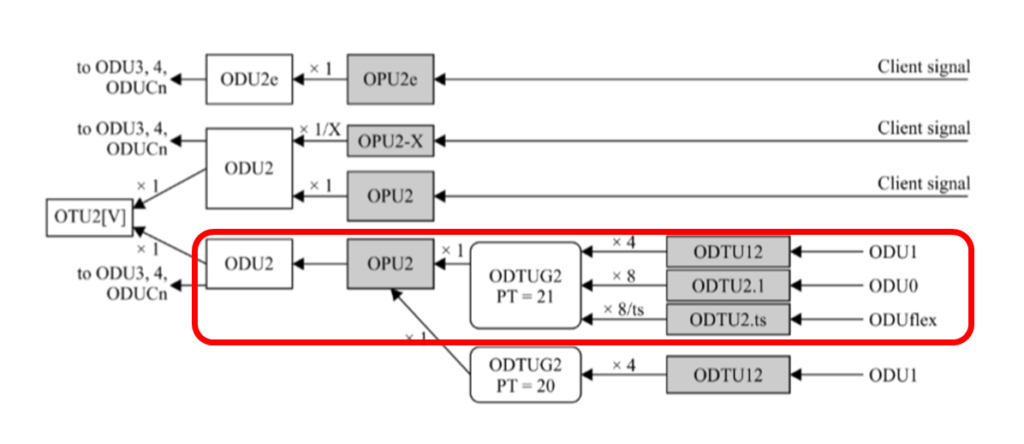
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
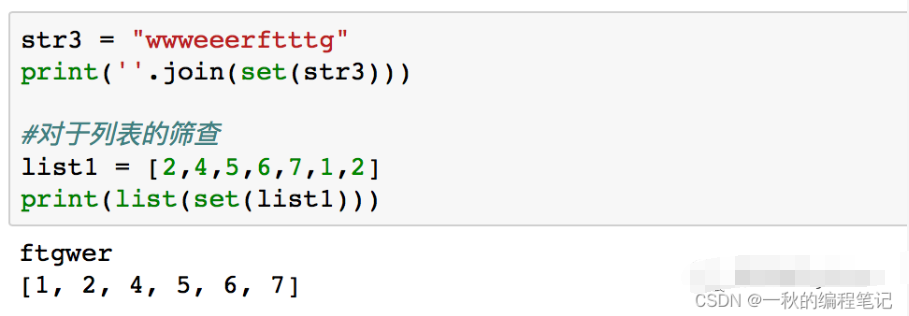
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )