简并与非简并线性方程组的求解方法
发布时间: 2024-03-04 15:43:45 阅读量: 46 订阅数: 47 
# 1. 线性方程组及简并与非简并定义
## 1.1 线性方程组的基本概念
在线性代数中,线性方程组是由一组线性方程组成的方程集合。一般形式为:
$$a_{11}x_1 + a_{12}x_2 + \cdots + a_{1n}x_n = b_1$$
$$a_{21}x_1 + a_{22}x_2 + \cdots + a_{2n}x_n = b_2$$
$$\vdots$$
$$a_{m1}x_1 + a_{m2}x_2 + \cdots + a_{mn}x_n = b_m$$
其中,$a_{ij}$ 和 $b_i$ ($i=1,2,...,m$;$j=1,2,...,n$)为已知系数,$x_1, x_2, ..., x_n$ 为未知数。
## 1.2 简并与非简并线性方程组的区分
- **简并线性方程组**:当一个线性方程组中的某些方程是其他方程的线性组合时,这些方程是冗余的,称为简并线性方程组。
- **非简并线性方程组**:线性方程组中的每个方程都是相互独立的,不存在多余方程叠加的情况。
## 1.3 简并与非简并线性方程组的特征
- **简并线性方程组特征**:简并线性方程组中可能存在无穷解,或者不唯一解。
- **非简并线性方程组特征**:非简并线性方程组中一般有唯一解。
在接下来的章节中,我们将探讨简并与非简并线性方程组的求解方法和区别。
# 2. 简并线性方程组的求解方法
在线性方程组中,简并性是指有无穷多解的情况,通常会给求解带来一定的困难。本章将介绍简并线性方程组的求解方法,包括高斯消元法和矩阵求逆法,并通过实例进行详细分析。
#### **2.1 高斯消元法在简并线性方程组中的应用**
高斯消元法是一种常用的线性代数算法,可以有效地解决简并线性方程组的求解问题。通过逐步将线性方程组化为阶梯形矩阵,再通过回代求解的方法得到最终结果。
```python
import numpy as np
# 高斯消元法函数
def gauss_elimination(A, b):
n = len(b)
for i in range(n):
pivot = A[i][i] # 主元素
for j in range(i + 1, n):
ratio = A[j][i] / pivot
A[j] -= ratio * A[i]
b[j] -= ratio * b[i]
x = np.zeros(n)
for i in range(n-1, -1, -1):
x[i] = (b[i] - np.dot(A[i][i+1:], x[i+1:])) / A[i][i]
return x
# 示例
A = np.array([[2, 1, -1], [1, -2, 1], [1, 1, -2]])
b = np.array([2, -1, 1])
solution = gauss_elimination(A, b)
print("求解的结果为:", solution)
```
通过上述代码,我们可以使用高斯消元法求解简并线性方程组的结果。
#### **2.2 矩阵求逆法解决简并线性方程组**
矩阵求逆法是另一种求解简并线性方程组的常用方法,通过计算系数矩阵的逆矩阵,并与常数矢量相乘得到最终解。
```java
import org.apache.commons.math3.linear.Array2DRowRealMatrix;
import org.apache.commons.math3.linear.DecompositionSolver;
import org.apache.commons.math3.linear.LUDecomposition;
public class MatrixInverseMethod {
public static void main(String[] args) {
double[][] coefficients = {{2, 1, -1}, {1, -2, 1}, {1, 1, -2}};
double[] constants = {2, -1, 1};
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以线性代数和空间解析几何为主题,涵盖了多个实际应用领域。首先介绍基于空间解析几何的实际应用,包括在工程、物理学和计算机图形学中的具体案例。接着深入讨论矩阵运算与线性方程组求解,以及线性变换与坐标系变换在实际问题中的应用。此外,还涉及向量空间与子空间的性质与应用,线性映射与矩阵的秩等内容,解析了这些概念在实际问题中的意义和应用。同时,还介绍了基于正交性质的几何关系分析、简并与非简并线性方程组的求解方法,以及三维空间中的向量叉乘与混合积所涉及的具体情境。此外,还对内积空间与正交投影、行列式求解与几何意义、空间中向量的投影与方向角、四元数在空间旋转中的应用以及线性代数在数据分析中的具体应用展开了讨论。通过这些内容,读者可以全面深入地了解线性代数与空间解析几何的实际应用,以及在各个领域中的重要性和价值。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MOXA串口服务器故障全解】:常见问题与解决方案速查手册

# 摘要
本文对MOXA串口服务器的使用和维护进行了系统的介绍和分析。首先概述了MOXA串口服务器的基本功能与重要性。随后,本文详细探讨了故障诊断与排查的基础知识,包括理解串口通信原理和MOXA设备工作模式,以及如何通过检查硬件和使用命令行工具进行故障排查。接着,文章重点讨论了串口服务器的常见问题及其解决方案,涵盖了通信、网络和系统配置方面的问题。在高级故障排
GC理论2010全解析:斜率测试新手快速入门指南

# 摘要
本论文旨在全面回顾2010年垃圾回收(GC)理论的发展,并探讨其在现代编程语言中的应用。首先,文章概述了GC的基本原理,包括其历史演变、核心概念以及性能评估方法。其次,论文重点介绍了GC理论的关键创新点,比如增量式、并行和混合式垃圾回收算法,并分析了它们的技术挑战和适用场景。为了进一步理解和评估GC的
GS+ 代码优化秘籍:提升性能的8大实战技巧
# 摘要
本文深入探讨了GS+代码优化的各个方面,旨在提升软件性能和效率。第一章概述了性能优化的重要性。第二章详细介绍了性能分析的基础知识,包括识别性能瓶颈、代码剖析技术和性能度量指标。第三章聚焦于实战技巧,涵盖了数据结构优化、算法效率提升、并行处理和多线程、以及缓存的利用与管理。第四章探讨了高级性能优化技术,包括异步编程模式、代码重构与模式应用、硬件加速技术。第五章通过案例研究与总结,提供性能优化的最佳实践,并评估优化策略的效果。本文旨在为软件开发者提供一套完整的性能优化框架和实用工具,以应对多样化的性能挑战。
# 关键字
性能分析;代码优化;数据结构;并行处理;异步编程;硬件加速;缓存管
【数据驱动的CMVM优化】:揭秘如何通过数据分析提升机床性能

# 摘要
随着技术的进步,数据驱动的CMVM(Configuration Management and Versioning Model)优化已经成为提高企业资产管理效率和质量的重要手段。本文概述了CMVM优化的整个流程,包括性能数据的收集与管理、数据分析的理论基础及应用,以及优化策略的制定和实施。文章深入探讨了数据收集的技术工具、数据存储与管理策略、数据清洗
【西门子SITOP电源效率提升指南】:系统性能的关键优化步骤

# 摘要
本文深入研究了西门子SITOP电源的效率、性能参数及优化策略。首先概述了电源效率的基础理论,探讨了效率的定义、重要性以及提升效率的理论方法,接着重点分析了西门子SITOP电源的关键性能参数和性能测试方法。文章深入挖掘了硬件和软件优化策略以及系统集成优化的方法,并通过案例研究分享了实践
【性能优化实战】:提升俄罗斯方块游戏运行效率的10大策略
# 摘要
本文针对俄罗斯方块游戏性能优化进行了综合探讨,涉及渲染性能、游戏逻辑、数据结构、内存管理以及并发与网络通信等方面的优化策略。通过分析渲染引擎核心原理、图形处理与资源管理技术、硬件加速和多线程渲染的优势,本文深入探讨了提升游戏性能的技术手段。同时,文章对游戏逻辑代码和数据结构的选择进行了优化分析,以及介绍了内存分配、
云服务模型全解析:IaaS、PaaS、SaaS的区别与最优应用策略
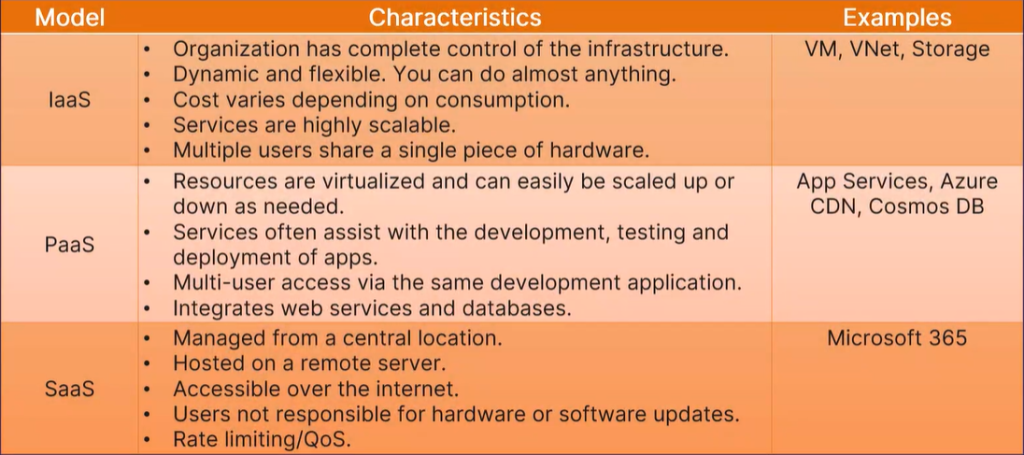
# 摘要
云计算作为一种新兴的计算模式,已经成为企业IT架构的重要组成部分。本文系统地概述了云服务的三种主要模型:IaaS、PaaS和SaaS,并详细探讨了它们的架构特性、技术细节、业务价值以及应用场景
优化至上:MATLAB f-k滤波器性能提升的8大策略
# 摘要
本论文对MATLAB环境下的f-k滤波器进行了系统的研究,涵盖了其基本原理、性能提升的理论基础、实践技巧以及在不同领域的应用效果。文章首先介绍了f-k滤波器的基本工作原理和数学模型,随后深入探讨了提升其性能的关键参数分析和理论方法。接着,通过算法效率、数据处理改进及资源管理与分配优化等实践技巧,探讨了如何在实际应用中提高f-k滤波器的性能。此外,文章还研究了f-
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )